
卡尔曼滤波—建立状态空间表达式
在50年代蓬勃兴起的航天技术的推动下,1960年前后开始了从经典控制理论到现代控制理论的过渡,其中一个重要标志就是卡尔曼系统地将状态空间概念引入到控制理论中来。现代控制理论正是在引入状态和状态空间概念的基础上发展起来的。现代控制理论中的线性系统理论运用状态空间法描述输入—状态—输出诸变量间的因果关系,不但反映了系统的输入—输出外部特性,而且揭示了系统内部的结构特性。
如果要从数学上用状态空间的方法描述系统动态特性,则需要利用3种变量
(1) 输入变量ui是影响系统运动的外作用(给定或扰动);
(2) 输出变量yi是可以从外部直接测量的特征变量;
(3) 状态变量xq是表征系统内部动态特性的变量。
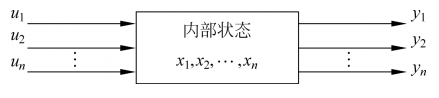
以上三个变量可以表示为向量的形式,对于离散系统来说,u,y,x都是取采样时刻的函数值。
线性时不变离散系统的状态空间表达式为:
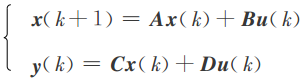
上式分别为系统的状态方程(反应系统内部变量和输入变量之间的关系)和系统的输出方程(表征系统内部变量及输入变量和输出变量间的转换关系),两式统称为系统的状态空间表达式。
下面举一个简单的例子:如图所示的RLC网络,根据基尔霍夫定律可列如下方程
![]()
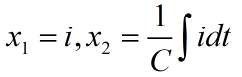
电路输出量为
![]()

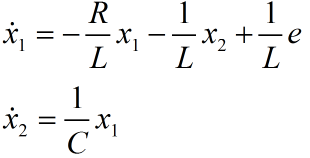
设状态变量为:
则状态方程为:
写成矩阵形式为:
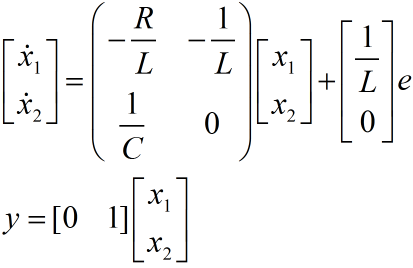
简记为:




【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律