CANopen笔记4 -- CanFestival在树莓派3B+上使用
CanFestival是开源的CANOpen协议库(其它开源库还有CANOpenNode,Lely CANopen,CANopen Stack,以及ROS下的ros_canopen,Python实现的canopen等)。CanFestival具有许多优势:
1. CanFestival为开发者提供了许多工具,以提高开发的便利性。例如用于生成节点对象字典源代码的对象字典编辑器objdictedit,以及便于开发者自由配置编译选项的配置脚本。
2. CanFestival能够运行于多种类型的平台。CanFestival源代码由ANSI-C编写,驱动和例程的编译情况仅取决于具体的编译工具。在目前最新的版本中,官方提供了对于多种硬件平台的驱动。此外,CanFestival可以在任意类Unix系统下编译和运行,如Linux和FreeBSD。
3. CanFestival协议功能完整,完全符合CANopen标准。CanFestival完全支持2002年2月发布的CIA DS-301 V4.02标准,并支持CiA DS302中的简明DFC协议。
一、树莓派3B+上编译安装CanFestival
CanFestival的源代码可以在https://hg.beremiz.org/CanFestival-3下载,解压后进入CanFestival-3的目录,在树莓派3B+上通过如下命令来配置编译选项
./configure --arch=armv7 --target=unix --can=socket
其中arch选项用于设置处理器架构,target选项设置运行的目标系统,can选项设置can底层驱动,这里选socket设置为socket-can。其它选项通过./configure --help查询,如果想要在CanFestival运行时输出调试信息,可以通过选项--debug=MSG,WAR来实现。
在 Linux 系统中,CAN 总线接口设备作为网络设备被系统进行统一管理。在 CAN 总线应用开发方面,Linux 提供了SocketCAN接口,使得CAN总线通信近似于以太网的通信(具体使用SocketCAN编程可参考Linux CAN编程详解)。使用树莓派3B+发送CAN消息可以通过其SPI接口外接CAN扩展板实现,比如微雪电子的RS485 CAN HAT 或双通道CAN的2-CH CAN FD HAT。
配置完成后,通过make命令编译,以及sudo make install进行安装。在安装对象字典编辑器时要保证安装了Python(2.4版本以上)及wxPython(2.6.3.2版本以上),对象字典编辑器的界面基于wxPython构建,可通过sudo apt-get install python-wxtools命令进行安装。CanFestival安装成功后其头文件会安装到/usr/local/include/canfestival目录下,库文件会安装到/usr/local/lib中。
通过下面的命令配置CAN,设置波特率,并开启can0
sudo ip link set can0 type can bitrate 500000 sudo ifconfig can0 up
在CanFestival-3的example文件夹中CANOpenShell示例程序可以用来在终端中执行一些CANOpen指令,比如扫描网络,发送SDO读写其它节点的对象字典,进行NMT控制等,开启CANOpenShell的用法如下:
CANOpenShell load#CanLibraryPath,channel,baudrate,nodeid,type (0:slave, 1:master)
比如通过socket-can发送can消息,通道为can0,波特率500k,节点id为1,类型为主节点,开启CANOpenShell的命令为:
CANOpenShell load#libcanfestival_can_socket.so,can0,500k,1,1
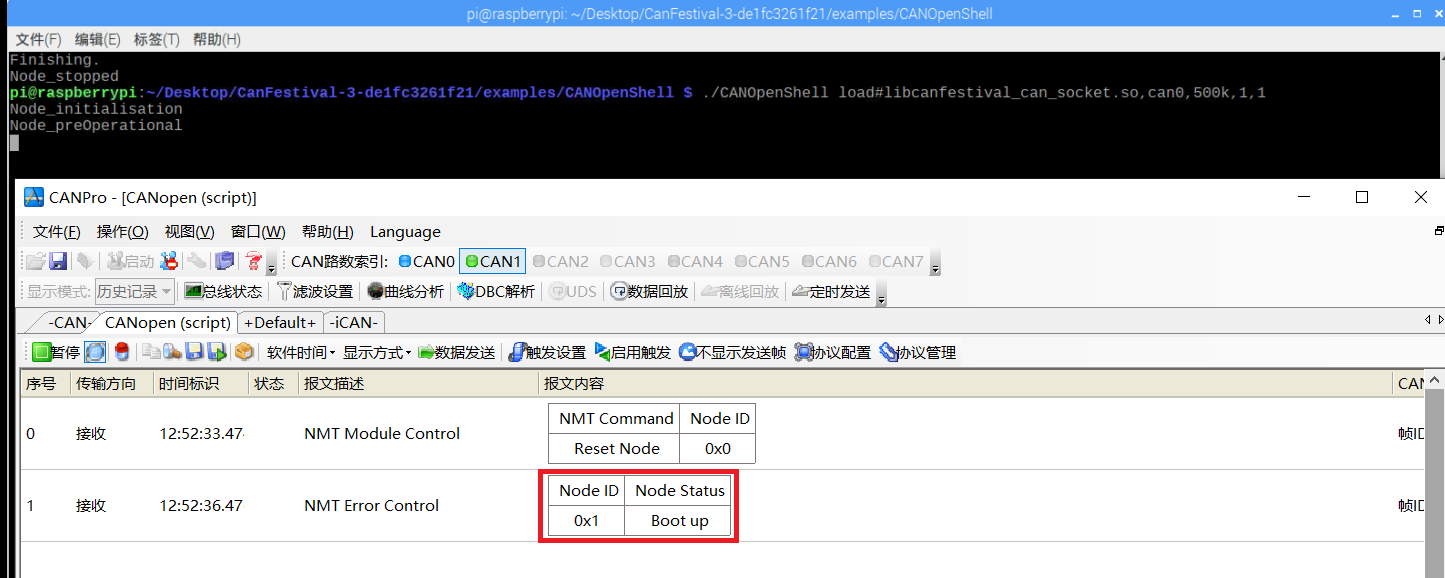
将树莓派CAN扩展版的CAN-H与CAN-L接到笔记本的USB-CAN卡上,打开CANPro软件,可以看到CANOpenShell节点启动后会发送bootup消息,bootup消息的报文格式为:
| COB-ID | Data(1 byte) |
| 0x700+Node id | 00 |
二、开发新的CANOpen节点
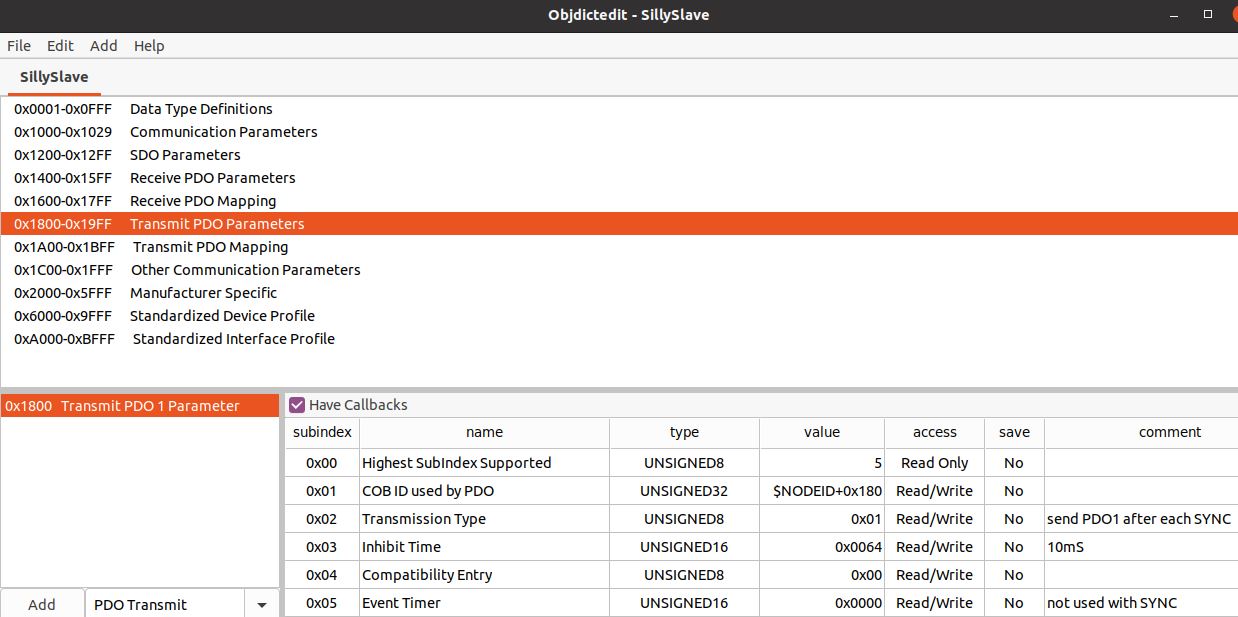
CanFestival自带的文档不够详细,初学者需要仔细阅读CanFestival v3.0 Manual、源代码doc文件夹下的CANOpen_memento.pdf以及doxygen根据代码注释生成的文档,除此之外主要就是参考example里面的几个示例程序,如SillySlave、TestMasterSlave、CANOpenShell等。SillySlave示例程序展示了从节点接收SYNC消息给主节点发送TPDO数据,TestMasterSlave展示了主从节点之间的相互通信(涉及NMT、SDO、PDO、SYNC等内容)。用objdictedit打开SillySlave的对象字典SillySlave.od文件,在TPDO1通信参数中可看到子索引02h设置为1,即收到1个SYNC同步消息发送一次PDO数据。
在使用CanFestival时要明确设计的节点是要当master(如运动控制中的上位机控制节点)对其它节点进行管理,还是要当slave(如伺服驱动器节点)响应master进行操作。任意时刻CANopen网络中都仅存在一个设备以主设备身份执行特定功能,CANopen 网络中所有其他的设备均为从设备。使用CanFestival不管是开发主节点还是从节点均要设计对象字典,对象字典定义了节点的各种参数和内容。
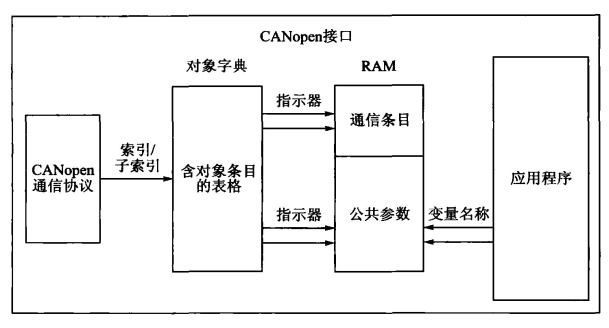
如下图所示,CanFestival通过固定的索引/子索引来访问对象列表中的条目。对象列表提供一个指向存储器中某个变量的指针。应用程序可直接通过变量名称访问所需的条目。对象字典列表就构成了索引/子索引与对应变量名称之间的接口。子索引条目采用subindex结构体描述(参考CanFestival源代码include文件夹下的objdictdef.h文件,定义了对象字典相关的参数)
typedef struct td_subindex { UNS8 bAccessType; /* 访问类型 */ UNS8 bDataType; /* 数据类型 */ UNS32 size; /* 数据大小 */ void* pObject; /* 指针指向变量 */ } subindex;
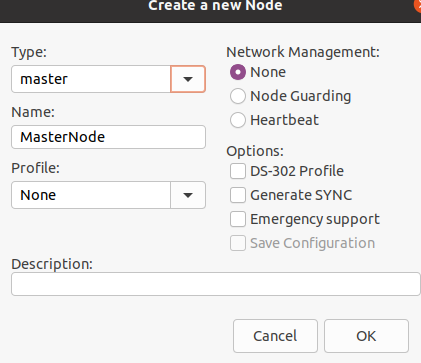
由于对象字典内容较多,CanFestival提供objdictedit程序通过图形化界面快速设计并生成所需要的对象字典。如下图,objdictedit中新建一个节点时选择节点类型(主节点/主站master或从节点/从站slave),输入节点名称(如MasterNode,后续将生成以节点名称为名字的MasterNode.c文件和对应的MasterNode.h的头文件),Profile中可选择不同的子协议类型(如运动控制子协议DS-402)。
对象字典的配置涉及对CANOpen协议的理解,可参考DS-301协议文档、CANOpen_memento.pdf以及《现场总线CANopen设计与应用》一书。使用对象字典编辑器完成节点的配置后,点击Build Dictionary可生成对应的对象字典C语言源代码。

CanFestival中最重要的数据类型为结构体CO_Data,不需要用户进行初始化,在对象字典编辑工具生成C文件的时候会对其进行初始化赋值(如果不初始化会出现段错误segmentation fault)。

生成对象字典C文件后,程序流程可参考SillySlave或TestMasterSlave代码。最后在用gcc或g++编译时注意canfestival头文件和相关库的路径,以及链接的库(-lrt :provides POSIX realtime extensions;如果程序中使用dlopen、dlsym、dlclose、dlerror 显示加载动态库,需要设置链接选项 -ldl)
g++ -O2 main.c master.c MasterNode.c -I /usr/local/include/canfestival/ -L /usr/local/lib/ -lcanfestival -lcanfestival_unix -lpthread -lrt -ldl -o test
以SillySlave示例程序为模板将其改为最简单的主节点程序,main.c代码如下:


1 #include "master.h" 2 3 4 int main(int argc,char **argv) 5 { 6 char* LibraryPath = (char*)"/usr/local/lib/libcanfestival_can_socket.so"; 7 8 LoadCanDriver(LibraryPath); 9 10 if(InitCANdevice((char*)"vcan0" , 500000, 0x0A) < 0) 11 { 12 printf("\nInitCANdevice() failed, exiting.\n"); 13 return -1; 14 } 15 16 return 0; 17 }
主节点相关的代码如下(主节点代码中用到了前一步对象字典编辑器生成的主节点对象字典MasterNode.c代码),master.h:
1 #include "canfestival.h" 2 #include "data.h" 3 #include <unistd.h> 4 #include <stdio.h> 5 6 7 INTEGER8 InitCANdevice( char* bus, UNS32 baudrate, UNS8 node ); 8 9 void MasterNode_heartbeatError(CO_Data* d, UNS8); 10 11 UNS8 MasterNode_canSend(Message *); 12 13 void MasterNode_initialisation(CO_Data* d); 14 void MasterNode_preOperational(CO_Data* d); 15 void MasterNode_operational(CO_Data* d); 16 void MasterNode_stopped(CO_Data* d); 17 18 void MasterNode_post_sync(CO_Data* d); 19 void MasterNode_post_TPDO(CO_Data* d); 20 void MasterNode_storeODSubIndex(CO_Data* d, UNS16 wIndex, UNS8 bSubindex); 21 void MasterNode_post_emcy(CO_Data* d, UNS8 nodeID, UNS16 errCode, UNS8 errReg);
master.c代码如下,在主节点进入预操作状态Pre-operational后,在对应的回调函数中通过setState函数改变主节点状态,进入操作状态operational。
1 #include "MasterNode.h" 2 #include "master.h" 3 4 5 static UNS8 masterNodeID = 0; 6 7 void InitNode(CO_Data* d, UNS32 id) 8 { 9 /* Defining the node Id */ 10 setNodeId(&MasterNode_Data, masterNodeID); 11 /* CAN init */ 12 setState(&MasterNode_Data, Initialisation); 13 } 14 15 void Exit(CO_Data* d, UNS32 id) 16 { 17 setState(&MasterNode_Data, Stopped); 18 } 19 20 INTEGER8 InitCANdevice(char * bus, UNS32 baudrate, UNS8 node ) 21 { 22 char busName[2]; 23 char baudRate[7]; 24 s_BOARD board; 25 26 27 sprintf(baudRate, "%uK", baudrate); 28 board.busname = bus; 29 board.baudrate = baudRate; 30 31 masterNodeID = node; 32 33 MasterNode_Data.heartbeatError = MasterNode_heartbeatError; 34 MasterNode_Data.initialisation = MasterNode_initialisation; 35 MasterNode_Data.preOperational = MasterNode_preOperational; 36 MasterNode_Data.operational = MasterNode_operational; 37 MasterNode_Data.stopped = MasterNode_stopped; 38 MasterNode_Data.post_sync = MasterNode_post_sync; 39 MasterNode_Data.post_TPDO = MasterNode_post_TPDO; 40 MasterNode_Data.storeODSubIndex = MasterNode_storeODSubIndex; 41 MasterNode_Data.post_emcy = MasterNode_post_emcy; 42 43 TimerInit(); 44 45 if(!canOpen(&board, &MasterNode_Data)) 46 { 47 printf("\n\aInitCANdevice() CAN bus %s opening error, baudrate=%s\n",board.busname, board.baudrate); 48 return -1; 49 } 50 51 52 printf("\nInitCANdevice(), canOpen() OK, starting timer loop...\n"); 53 54 /* Start timer thread */ 55 StartTimerLoop(&InitNode); 56 57 /* wait Ctrl-C */ 58 pause(); 59 printf("\nFinishing.\n"); 60 61 /* Stop timer thread */ 62 StopTimerLoop(&Exit); 63 return 0; 64 } 65 66 void MasterNode_heartbeatError(CO_Data* d, UNS8 heartbeatID) 67 { 68 printf("MasterNode_heartbeatError %d\n", heartbeatID); 69 } 70 71 void MasterNode_initialisation(CO_Data* d ) 72 { 73 printf("MasterNode_initialisation\n"); 74 } 75 76 77 void MasterNode_preOperational(CO_Data* d) 78 { 79 printf("MasterNode_preOperational\n"); 80 81 setState(d, Operational); 82 } 83 84 void MasterNode_operational(CO_Data* d) 85 { 86 printf("MasterNode_operational\n"); 87 } 88 89 void MasterNode_stopped(CO_Data* d) 90 { 91 printf("MasterNode_stopped\n"); 92 } 93 94 void MasterNode_post_sync(CO_Data* d) 95 { 96 printf("MasterNode_post_sync\n"); 97 } 98 99 void MasterNode_post_TPDO(CO_Data* d) 100 { 101 printf("MasterNode_post_TPDO\n"); 102 } 103 104 void MasterNode_storeODSubIndex(CO_Data* d, UNS16 wIndex, UNS8 bSubindex) 105 { 106 /*TODO : 107 * - call getODEntry for index and subindex, 108 * - save content to file, database, flash, nvram, ... 109 * 110 * To ease flash organisation, index of variable to store 111 * can be established by scanning d->objdict[d->ObjdictSize] 112 * for variables to store. 113 * 114 * */ 115 printf("MasterNode_storeODSubIndex : %4.4x %2.2xh\n", wIndex, bSubindex); 116 } 117 118 void MasterNode_post_emcy(CO_Data* d, UNS8 nodeID, UNS16 errCode, UNS8 errReg) 119 { 120 printf("Slave received EMCY message. Node: %2.2xh ErrorCode: %4.4x ErrorRegister: %2.2xh\n", nodeID, errCode, errReg); 121 }
为了方便观察输出信息,也可通过创建虚拟vcan,使用candump命令(sudo apt-get install can-utils)查看can报文。
sudo modprobe vcan sudo ip link add dev vcan0 type vcan sudo ip link set up vcan0
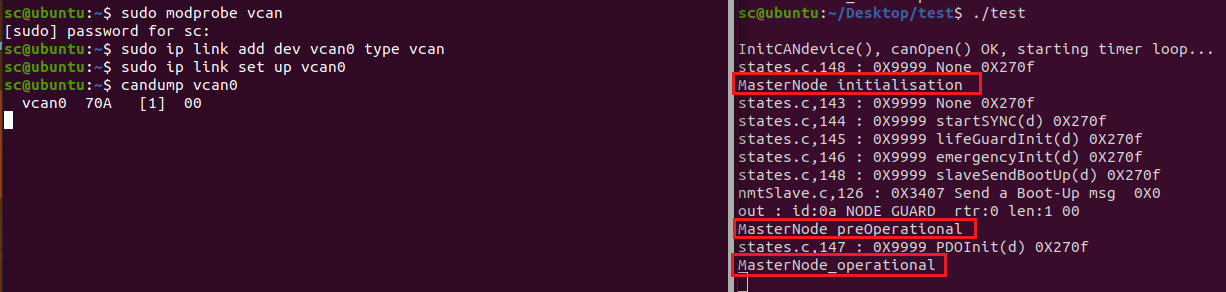
从程序输出的信息中可以看到主节点在初始化状态后发送Boot-up message,然后自动进入Pre-operational预操作状态,随后按照程序中的setState函数设定进入operational操作状态。
参考
2.《现场总线CANopen设计与应用》
4. 基于ZYNQ的开源CANopen协议栈CANFestival移植

 浙公网安备 33010602011771号
浙公网安备 33010602011771号