
linux内核分析(网课期末&地面课期中)
堆栈变化过程:















计算机是如何工作的?(总结)——三个法宝
-
存储程序计算机工作模型,计算机系统最最基础性的逻辑结构;
-
函数调用堆栈,高级语言得以运行的基础,只有机器语言和汇编语言的时候堆栈机制对于计算机来说并不那么重要,但有了高级语言及函数,堆栈成为了计算机的基础功能;
-
enter
-
pushl %ebp
-
movl %esp,%ebp
-
leave
-
movl %ebp,%esp
-
popl %ebp
-
函数参数传递机制和局部变量存储
-
中断,多道程序操作系统的基点,没有中断机制程序只能从头一直运行结束才有可能开始运行其他程序。
反汇编
gcc -g 生成可执行文件
objdump -S 获得反汇编文件
C语言内嵌汇编语言(模板):
asm volatile(
输出:
输入:
破坏描述部分
);
一、Linux内核源代码介绍
1、根目录
arch/x86目录下的代码是我们重点关注的,arch中包括支持不同CPU的源代码。
init目录下包含内核启动相关的代码,如main.c(start_kernel函数相当于普通C程序的main函数,是Linux内核初始化的起点)。
ipc:进程间通信
kernel:Linux内核的核心代码
关注readme文件
二、构造一个简单的Linux系统MenuOS
1、在实验楼环境下:
cd LinuxKernel/
qemu -kernel linux-3.18.6/arch/x86/boot/bzImage -initrd rootfs.img
即可启动内核,完成后进入menu程序,支持三个命令help、version和quit。
2、使用自己的Linux系统环境搭建MenuOS的过程
# 下载内核源代码编译内核
cd ~/LinuxKernel/
wget https://www.kernel.org/pub/linux/kernel/v3.x/linux-3.18.6.tar.xz
xz -d linux-3.18.6.tar.xz
tar -xvf linux-3.18.6.tar(解压)
cd linux-3.18.6
make i386_defconfig
make # 一般要编译很长时间,少则20分钟多则数小时
# 制作根文件系统
cd ~/LinuxKernel/
mkdir rootfs
git clone https://github.com/mengning/menu.git # 如果被墙,可以使用附件menu.zip
cd menu
gcc -o init linktable.c menu.c test.c -m32 -static –lpthread(init是第一个用户态进程,是1号进程,采用的是静态编译的方式)
cd ../rootfs
cp ../menu/init ./
find . | cpio -o -Hnewc |gzip -9 > ../rootfs.img(img镜像文件)
# 启动MenuOS系统
cd ~/LinuxKernel/
qemu -kernel linux-3.18.6/arch/x86/boot/bzImage -initrd rootfs.img
3、重新配置编译Linux使之携带调试信息
(1)在原来配置的基础上,make menuconfig选中如下选项重新配置Linux,使之携带调试信息
kernel hacking—>
[*] compile the kernel with debug info
(2)make重新编译(时间较长)
4、使用gdb跟踪调试内核
qemu -kernel linux-3.18.6/arch/x86/boot/bzImage -initrd rootfs.img -s -S # 关于-s和-S选项的说明:
# -S freeze CPU at startup (use ’c’ to start execution)
# -s shorthand for -gdb tcp::1234 若不想使用1234端口,则可以使用-gdb tcp:xxxx来取代-s选项
另开一个shell窗口
gdb
(gdb)file linux-3.18.6/vmlinux # 在gdb界面中target remote之前加载符号表 file home/shiyanlou/LinuxKernel/vmlinux
(gdb)target remote:1234 # 建立gdb和gdbserver之间的连接,按c 让qemu上的Linux继续运行
(gdb)break start_kernel # 断点的设置可以在target remote之前,也可以在之后
Linux内核分析实验二:mykernel实验指导(操作系统是如何工作的)
Linux内核分析实验三----跟踪分析Linux内核的启动过程
一、用户态、内核态
权限分级——为了系统本身更稳定,使系统不宜崩溃。(并不是所有程序员缩写的代码都很健壮!!)
x86 CPU四种不同的执行级别:0(内核态)—3(用户态)
区分方法:CS:EIP(CPU的每条指令都是通过这里执行)(代码段选择寄存器:偏移量寄存器)
CS寄存器的最低两位表明了代码级别——逻辑地址(不是物理地址)
内核态:可以访问4G地址空间的任意地址 用户态:0x00000000—0xbfffffff空间内的地址
二、中断——从用户态进入内核态
系统调用是一种特殊的中断(用户态进程与硬件设备的接口)
切换时就会涉及到上下文的问题?
即中断int指令在堆栈上会保存一些值:1.用户态栈顶地址 2.当时状态字 3.当时CS:EIP的值
save—cs:eip ss:eip eflag
load—cs:eip ss:eip
过程:1.SAVE_ALL——保存现场
判断是否有进程调度?
(无进程调度)last.RESTORE_ALL+iret(popl cs:eip/ss:eip/efalg)
(有进程调度)last.暂时保存当前的值直到该进程再次被调度
三、API——应用程序编程接口(不同于系统调用)
- API是一个函数定义
- 系统调用请求一个软中断
- 触发系统调用通过传递系统调用号实现(压栈传递参数)
Linux内核分析实验四
一、给MenuOS增加time和time-asm命令
1. 克隆并自动编译MenuOS
rm menu -rf强制删除原menu文件
git clone http:
cd menumakerootfs运行自动编译脚本,生成根文件系统,启动MenuOS
2. 给MenuOS增加time和time-asm命令
更新menu代码到最新版
test.c中main函数里,增加MenuConfig
增加对应的两个函数:Time和TimeAsm
make rootfs
二、调试内核
1. 使用gdb跟踪调试内核
qemu -kernel linux-3.18.6/arch/x86/boot/bzImage -initrd rootfs.img -s -S
gdb(gdb)file linux-3.18.6/vmlinux
(gdb)targetremote:1234
b sys_time:在系统调用time的位置设置断点
c:在MenuOs里使用time,停在断点处
s 单步调试—一步一步执行(PS:无法执行time_asm中的int 0X80部分)
三、系统调用在内核代码中的处理过程
1. 系统调用在内核代码中的工作机制和初始化
- main.c中start_kernel函数:trap_init()
- set_system_trap_gate(SYSCALL_VECTOR,&system_call)
- SYSCALL_VECTOR:系统调用的中断向量
- &system_call:汇编代码入口
- 一执行int 0x80,系统直接跳转到system_call。
2. 系统调用——一个特殊的中断

SAVE_ALL:保存现场
call *sys_call_table(,%eax,4)调用了系统调度处理函数,eax存的是系统调用号,是实际的系统调度程序。
sys_call_table:系统调用分派表
syscall_after_all:保存返回值
若有sys_exit_work,则进入sys_exit_work:会有一个进程调度时机。
work_pending -> work_notifysig,用来处理信号
可能call schedule:进程调度代码
可能跳转到restore_all,恢复现场。
若无sys_exit_work,就执行restore_all恢复,返回用户态。
INTERRUPT_RETURN <=> iret,结束。
-在系统调用返回之前,可能发生进程调度,进程调度里就会出现进程上下文的切换。-进程间通信可能有信号需要处理。-可以将内核视为一系列中断指令的集合。
进程控制块PCB——task_struct(进程描述符)
为了管理进程,内核必须对每个进程进行清晰的描述,进程描述符提供了内核所需了解的进程信息。
struct task_struct数据结构很庞大
-
Linux进程的状态与操作系统原理中的描述的进程状态似乎有所不同,比如就绪状态和运行状态都是TASK_RUNNING,为什么呢?
TASK_RUNN有没有在CPU上执行决定他是就绪还是运行状态。
和操作系统类似:就绪态,运行态,阻塞态
进程的标示pid
-
所有进程链表struct list_head tasks;
SMP条件编译器
链表代码——双向链表

-
程序创建的进程具有父子关系,在编程时往往需要引用这样的父子关系。进程描述符中有几个域用来表示这样的关系

-
Linux为每个进程分配一个8KB大小的内存区域,用于存放该进程两个不同的数据结构:Thread_info和进程的内核堆栈
-
进程处于内核态时使用, 不同于用户态堆栈,即PCB中指定了内核栈,那为什么PCB中没有用户态堆栈?用户态堆栈是怎么设定的?
-
内核控制路径所用的堆栈 很少,因此对栈和Thread_info 来说,8KB足够了
-
struct thread_struct thread; //CPU-specific state of this task
一、得到一个可执行程序
1. 预处理、编译、链接
gcc hello.c -o hello.exe-
gcc编译源代码生成最终可执行的二进制程序,GCC后台隐含执行了四个阶段步骤。
预处理 => 编译 => 汇编 => 链接 -
预处理:编译器将C源代码中包含的头文件编译进来和执行宏替换等工作。
gcc -E hello.c -o hello.i -
编译:gcc首先要检查代码的规范性、是否有语法错误等,以确定代码的实际要做的工作,在检查无误后,gcc把代码翻译成汇编语言。
gcc –S hello.i –o hello.s -S:该选项只进行编译而不进行汇编,生成汇编代码。 -
汇编:把编译阶段生成的
.s文件转成二进制目标代码.gcc –c hello.s –o hello.o -
链接:将编译输出
.o文件链接成最终的可执行文件。gcc hello.o –o hello -
运行:若链接没有-o指明,则生成可执行文件默认为
a.out./hello

2. 目标文件格式
a.out——COFF——ELF(Linux)或PE(Windows)
重点介绍ELF——三种重要格式文件
- 可重定位文件:保存着代码和适当的数据,用来和其他的object文件一起来创建一个可执行文件或者是一个共享文件。
- 可执行文件:保存着一个用来执行的程序;该文件指出了exec(BA_OS)如何来创建程序进程映象。
- 共享文件:保存着代码和合适的数据,用来被下面的两个链接器链接。
- 第一个是连接编辑器[请参看ld(SD_CMD)],可以和其他的可重定位和共享object文件来创建其他的object。
- 第二个是动态链接器,联合一个可执行文件和其他的共享object文件来创建一个进程映象。
- object文件参与程序的链接(创建)和执行。
3. 静态链接的ELF可执行文件和进程的地址空间
- 入口点:程序从0x804800开始。
- 可执行文件加载到内存中开始执行的第一行代码。
- 一般静态链接将会把所有代码放在同一个代码段。
- 动态连接的进程会有多个代码段。
二、可执行程序的执行环境
1. 命令行参数和shell环境
-
列出/usr/bin下的目录信息
$ ls -l /usr/bin -
Shell本身不限制命令行参数的个数,命令行参数的个数受限于命令自身
int main(int argc, char *argv[], char *envp[]) -
Shell会调用execve将命令行参数和环境参数传递给可执行程序的main函数
int execve(const char * filename,char * const argv[ ],char * const envp[ ]); -
库函数exec*都是execve的封装例程
2. 命令行参数和shell环境变量的保存与传递
shell程序 => execve => sys_execve- 命令行参数和环境串都放在用户态堆栈中
-
初始化新程序堆栈时拷贝进去
3. 可执行程序动态链接
(1)动态链接
-
关注:
load_elf_binaryload_elf_binary(...) { ... kernel_read();//其实就是文件解析 ... //映射到进程空间 0x804 8000地址 elf_map();// ... if(elf_interpreter) //依赖动态库的话 { ... //装载ld的起点 #获得动态连接器的程序起点 elf_entry=load_elf_interp(...); ... } else //静态链接 { ... elf_entry = loc->elf_ex.e_entry; ... } ... //static exe: elf_entry: 0x804 8000 //exe with dyanmic lib: elf_entry: ld.so addr start_thread(regs,elf_entry,bprm->p); } - 实际上,装载过程是一个广度遍历,遍历的对象是“依赖树”。
-
主要过程是动态链接器完成、用户态完成。
(2)装载时动态链接
/*准备.so文件*/
shlibexample.h (1.3 KB) - Interface of Shared Lib Example
shlibexample.c (1.2 KB) - Implement of Shared Lib Example
/*编译成libshlibexample.so文件*/
$ gcc -shared shlibexample.c -o libshlibexample.so -m32
/*使用库文件(因为已经包含了头文件所以可以直接调用函数)*/
SharedLibApi();(3)运行时动态链接
dllibexample.h (1.3 KB) - Interface of Dynamical Loading Lib Example
dllibexample.c (1.3 KB) - Implement of Dynamical Loading Lib Example
/*编译成libdllibexample.so文件*/
$ gcc -shared dllibexample.c -o libdllibexample.so -m32
/*使用库文件*/
void * handle = dlopen("libdllibexample.so",RTLD_NOW);//先加载进来
int (*func)(void);//声明一个函数指针
func = dlsym(handle,"DynamicalLoadingLibApi");//根据名称找到函数指针
func(); //调用已声明函数(4)运行
$ gcc main.c -o main -L/path/to/your/dir -lshlibexample -ldl -m32
$ export LD_LIBRARY_PATH=$PWD
/*将当前目录加入默认路径,否则main找不到依赖的库文件,当然也可以将库文件copy到默认路径下。*/三、可执行程序的装载
1. sys_execve内核处理过程
(1)新的可执行程序起点
- 一般是地址空间为0x8048000或0x8048300
(2)execve与fork
execve和fork都是特殊一点的系统调用:一般的都是陷入到内核态再返回到用户态。-
fork两次返回,第一次返回到父进程继续向下执行,第二次是子进程返回到ret_from_fork然后正常返回到用户态。
-
execve执行的时候陷入到内核态,用execve中加载的程序把当前正在执行的程序覆盖掉,当系统调用返回的时候也就返回到新的可执行程序起点。
execve
- 执行到可执行程序 -> 陷入内核
- 构造新的可执行文件 -> 覆盖掉原可执行程序
- 返回到新的可执行程序,作为起点(也就是main函数)
- 需要构造其执行环境;- Shell会调用execve将命令行参数和环境参数传递给可执行程序的main函数,先函数调用参数传递,再系统调用参数传递。
(3)静态链接的可执行程序和动态链接的可执行程序execve系统调用返回时不同
- 静态链接:elf_entry指向可执行文件的头部,一般是main函数,是新程序执行的起点。
- 动态链接:elf_entry指向ld(动态链接器)的起点,加载
load_elf_interp
2. 庄周梦蝶
庄周(调用execve的可执行程序)入睡(调用execve陷入内核),醒来(系统调用execve返回用户态)发现自己是蝴蝶(被execve加载的可执行程序)。3. 动态链接的可执行程序的装载
(1)可执行文件开始执行的起点在哪里?如何才能让execve系统调用返回到用户态时执行新程序?
- 修改int 0x80压入内核堆栈的EIP,通过修改内核堆栈中EIP的值作为新程序的起点。
(2)Linux内核是如何支持多种不同的可执行文件格式
static struct linux_binfmt elf_format//声明一个全局变量 = {
.module = THIS_MODULE,
.load_binary = load_elf_binary,//观察者自动执行
.load_shlib = load_elf_library,
.core_dump = elf_core_dump,
.min_coredump = ELF_EXEC_PAGESIZE,
};
static int __iit init_elf_binfmt(void)
{n
register_binfmt(&elf_format);//把变量注册进内核链表,在链表里查找文件的格式
return 0;
}(3)动态链接
- 可执行程序需要依赖动态链接库,而这个动态链接库可能会依赖其他的库,这样形成了一个关系图——动态链接库会生成依赖树。
- 依赖动态链接器进行加载库并进行解析(这就是一个图的遍历),装载所有需要的动态链接库;之后ld将CPU的控制权交给可执行程序
- 动态链接的过程主要是动态链接器在起作用,而不是内核完成的。
一、进程调度与进程调度的时机分析
1、不同类型的进程有不同的调度需求


Linux既支持普通的分时进程,也支持实时进程。
Linux中的调度是多种调度策略和调度算法的混合。
2、调度策略:是一组规则,它们决定什么时候以怎样的方式选择一个新进程运行。
Linux的调度基于分时和优先级。
3、内核中的调度算法相关代码使用了类似OOD的策略模式。
4、进程调度的时机
(1)中断处理过程中,schedule函数实现调度:

中断处理过程(包括时钟中断、I/O中断、系统调用和异常)中,直接调用schedule(),或者返回用户态时根据need_resched标记调用schedule()。
(2)用户态进程只能被动调度
用户态进程无法实现主动调度,仅能通过陷入内核态后的某个时机点进行调度,即在中断处理过程中进行调度。
(3)内核线程是只有内核态没有用户态的特殊进程
内核线程可以直接调用schedule()进行进程切换,也可以在中断处理过程中进行调度,也就是说内核线程作为一类的特殊的进程可以主动调度,也可以被动调度。
二、进程上下文切换相关代码分析
1、为了控制进程的执行,内核必须有能力挂起正在CPU上执行的进程,并恢复以前挂起的某个进程的执行,这叫做进程切换、任务切换、上下文切换。
2、挂起正在CPU上执行的进程,与中断时保存现场是不同的,中断前后是在同一个进程上下文中,只是由用户态转向内核态执行;进程上下文的切换是两个进程的切换。
3、进程上下文包含了进程执行需要的所有信息
(1)用户地址空间:包括程序代码,数据,用户堆栈等。
(2)控制信息:进程描述符,内核堆栈等。
(3)硬件上下文(注意中断也要保存硬件上下文只是保存的方法不同)。
4、schedule()函数选择一个新的进程来运行,并调用context_switch进行上下文的切换,这个宏调用switch_to来进行关键上下文切换。
next = pick_next_task(rq, prev);//进程调度算法、策略都封装这个函数内部
context_switch(rq, prev, next);//完成进程上下文切换
switch_to利用了prev和next两个参数:prev指向当前进程,next指向被调度的进程。
三、Linux系统的一般执行过程分析
1、最一般的情况:正在运行的用户态进程X切换到运行用户态进程Y的过程
(1)正在运行的用户态进程X
(2)发生中断——save cs:eip/esp/eflags(current) to kernel stack,then load cs:eip(entry of a specific ISR) and ss:esp(point to kernel stack).
(3)SAVE_ALL //保存现场
(4)中断处理过程中或中断返回前调用了schedule(),其中的switch_to做了关键的进程上下文切换
(5)标号1之后开始运行用户态进程Y(这里Y曾经通过以上步骤被切换出去过因此可以从标号1继续执行)
(6)restore_all //恢复现场
(7)iret - pop cs:eip/ss:esp/eflags from kernel stack
(8)继续运行用户态进程Y
2、关键:中断上下文的切换和进程上下文的切换
四、Linux系统执行过程中的几个特殊情况
1、几种特殊情况
(1)通过中断处理过程中的调度时机,用户态进程与内核线程之间互相切换和内核线程之间互相切换,与最一般的情况非常类似,只是内核线程运行过程中发生中断没有进程用户态和内核态的转换,CS段没有变化;
(2)内核线程主动调用schedule(),只有进程上下文的切换,没有发生中断上下文的切换,与最一般的情况略简略;
(3)创建子进程的系统调用在子进程中的执行起点next_ip = ret_from_fork及返回用户态,如fork;
(4)加载一个新的可执行程序后返回到用户态的情况,如execve。
2、X86_32位系统下,每个进程的地址空间4G。0-3G用户态,3G-4G仅内核态。
所有的进程3G以上的部分是共享的。
内核是各种中断处理过程和内核线程的集合。
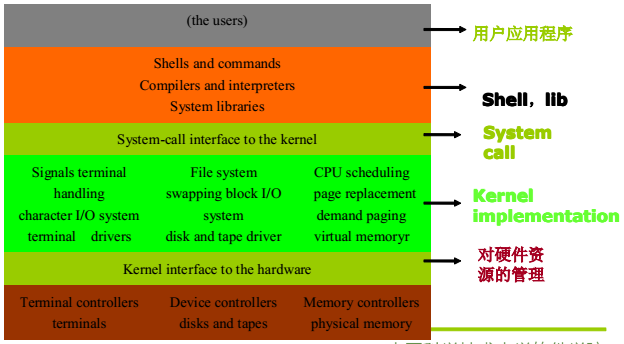
五、Linux操作系统架构概览
1、操作系统的基本概念

2、典型的Linux操作系统的结构
六、最简单也是最复杂的操作---执行ls命令

七、从CPU和内存的角度看Linux系统的执行
1、从CPU的角度

0xc0000000以下是3G的部分,用户态。
(1)c=gets();系统调用,陷入内核态,将eip/esp/cs/ds等信息压栈。
(2)进程管理:等待键盘敲入指令。
(3)中断处理:在键盘上敲击ls发生I/O中断。
进程x陷入内核态后没有内容执行变成阻塞态,发生I/O中断后变成就绪态。
(4)系统调用返回。
2、从内存的角度


 浙公网安备 33010602011771号
浙公网安备 33010602011771号