
基于PCA的最小包围盒
参考文章:
下面基于PCA的最小包围盒的代码是一样的,都是参考上述博客。
引用代码:

#include <vtkAutoInit.h> VTK_MODULE_INIT(vtkRenderingOpenGL); VTK_MODULE_INIT(vtkInteractionStyle); VTK_MODULE_INIT(vtkRenderingFreeType); #include <iostream> #include <string> #include <pcl/io/pcd_io.h> #include <pcl/point_cloud.h> #include <pcl/point_types.h> #include <Eigen/Core> #include <Eigen/Eigenvalues> #include <pcl/common/transforms.h> #include <pcl/common/common.h> #include <pcl/visualization/pcl_visualizer.h> using namespace std; typedef pcl::PointXYZ PointType; int main(int argc, char** argv) { pcl::PointCloud<PointType>::Ptr cloud(new pcl::PointCloud<PointType>()); pcl::io::loadPCDFile("C:\\Users\\80hu_mian.pcd", *cloud); /*利用PCA主元分析法获得点云的三个主方向,获取质心,计算协方差,获得协方差矩阵,求取协方差矩阵的特征值和特长向量,特征向量即为主方向 */ Eigen::Vector4f pcaCentroid; pcl::compute3DCentroid(*cloud, pcaCentroid); Eigen::Matrix3f covariance; pcl::computeCovarianceMatrixNormalized(*cloud, pcaCentroid, covariance); Eigen::SelfAdjointEigenSolver<Eigen::Matrix3f> eigen_solver(covariance, Eigen::ComputeEigenvectors); Eigen::Matrix3f eigenVectorsPCA = eigen_solver.eigenvectors(); Eigen::Vector3f eigenValuesPCA = eigen_solver.eigenvalues(); eigenVectorsPCA.col(2) = eigenVectorsPCA.col(0).cross(eigenVectorsPCA.col(1)); //校正主方向间垂直 eigenVectorsPCA.col(0) = eigenVectorsPCA.col(1).cross(eigenVectorsPCA.col(2)); eigenVectorsPCA.col(1) = eigenVectorsPCA.col(2).cross(eigenVectorsPCA.col(0)); std::cout << "特征值va(3x1):\n" << eigenValuesPCA << std::endl; std::cout << "特征向量ve(3x3):\n" << eigenVectorsPCA << std::endl; std::cout << "质心点(4x1):\n" << pcaCentroid << std::endl; /* // 另一种计算点云协方差矩阵特征值和特征向量的方式:通过pcl中的pca接口,如下,这种情况得到的特征向量相似特征向量 pcl::PointCloud<pcl::PointXYZ>::Ptr cloudPCAprojection (new pcl::PointCloud<pcl::PointXYZ>); pcl::PCA<pcl::PointXYZ> pca; pca.setInputCloud(cloudSegmented); pca.project(*cloudSegmented, *cloudPCAprojection); std::cerr << std::endl << "EigenVectors: " << pca.getEigenVectors() << std::endl;//计算特征向量 std::cerr << std::endl << "EigenValues: " << pca.getEigenValues() << std::endl;//计算特征值 */ Eigen::Matrix4f tm = Eigen::Matrix4f::Identity(); Eigen::Matrix4f tm_inv = Eigen::Matrix4f::Identity(); tm.block<3, 3>(0, 0) = eigenVectorsPCA.transpose(); //R. tm.block<3, 1>(0, 3) = -1.0f * (eigenVectorsPCA.transpose()) * (pcaCentroid.head<3>());// -R*t tm_inv = tm.inverse(); std::cout << "变换矩阵tm(4x4):\n" << tm << std::endl; std::cout << "逆变矩阵tm'(4x4):\n" << tm_inv << std::endl; pcl::PointCloud<PointType>::Ptr transformedCloud(new pcl::PointCloud<PointType>); pcl::transformPointCloud(*cloud, *transformedCloud, tm); PointType min_p1, max_p1; Eigen::Vector3f c1, c; pcl::getMinMax3D(*transformedCloud, min_p1, max_p1); c1 = 0.5f * (min_p1.getVector3fMap() + max_p1.getVector3fMap()); std::cout << "型心c1(3x1):\n" << c1 << std::endl; Eigen::Affine3f tm_inv_aff(tm_inv); pcl::transformPoint(c1, c, tm_inv_aff); Eigen::Vector3f whd, whd1; whd1 = max_p1.getVector3fMap() - min_p1.getVector3fMap(); whd = whd1; float sc1 = (whd1(0) + whd1(1) + whd1(2)) / 3; //点云平均尺度,用于设置主方向箭头大小 std::cout << "width1=" << whd1(0) << endl; std::cout << "heght1=" << whd1(1) << endl; std::cout << "depth1=" << whd1(2) << endl; std::cout << "scale1=" << sc1 << endl; const Eigen::Quaternionf bboxQ1(Eigen::Quaternionf::Identity()); const Eigen::Vector3f bboxT1(c1); const Eigen::Quaternionf bboxQ(tm_inv.block<3, 3>(0, 0)); const Eigen::Vector3f bboxT(c); //变换到原点的点云主方向 PointType op; op.x = 0.0; op.y = 0.0; op.z = 0.0; Eigen::Vector3f px, py, pz; Eigen::Affine3f tm_aff(tm); pcl::transformVector(eigenVectorsPCA.col(0), px, tm_aff); pcl::transformVector(eigenVectorsPCA.col(1), py, tm_aff); pcl::transformVector(eigenVectorsPCA.col(2), pz, tm_aff); PointType pcaX; pcaX.x = sc1 * px(0); pcaX.y = sc1 * px(1); pcaX.z = sc1 * px(2); PointType pcaY; pcaY.x = sc1 * py(0); pcaY.y = sc1 * py(1); pcaY.z = sc1 * py(2); PointType pcaZ; pcaZ.x = sc1 * pz(0); pcaZ.y = sc1 * pz(1); pcaZ.z = sc1 * pz(2); //初始点云的主方向 PointType cp; cp.x = pcaCentroid(0); cp.y = pcaCentroid(1); cp.z = pcaCentroid(2); PointType pcX; pcX.x = sc1 * eigenVectorsPCA(0, 0) + cp.x; pcX.y = sc1 * eigenVectorsPCA(1, 0) + cp.y; pcX.z = sc1 * eigenVectorsPCA(2, 0) + cp.z; PointType pcY; pcY.x = sc1 * eigenVectorsPCA(0, 1) + cp.x; pcY.y = sc1 * eigenVectorsPCA(1, 1) + cp.y; pcY.z = sc1 * eigenVectorsPCA(2, 1) + cp.z; PointType pcZ; pcZ.x = sc1 * eigenVectorsPCA(0, 2) + cp.x; pcZ.y = sc1 * eigenVectorsPCA(1, 2) + cp.y; pcZ.z = sc1 * eigenVectorsPCA(2, 2) + cp.z; //visualization pcl::visualization::PCLVisualizer viewer; pcl::visualization::PointCloudColorHandlerCustom<PointType> tc_handler(transformedCloud, 0, 255, 0); //转换到原点的点云相关 viewer.addPointCloud(transformedCloud, tc_handler, "transformCloud"); viewer.addCube(bboxT1, bboxQ1, whd1(0), whd1(1), whd1(2), "bbox1"); viewer.setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_REPRESENTATION, pcl::visualization::PCL_VISUALIZER_REPRESENTATION_WIREFRAME, "bbox1"); viewer.setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0.0, 1.0, 0.0, "bbox1"); viewer.addArrow(pcaX, op, 1.0, 0.0, 0.0, false, "arrow_X"); viewer.addArrow(pcaY, op, 0.0, 1.0, 0.0, false, "arrow_Y"); viewer.addArrow(pcaZ, op, 0.0, 0.0, 1.0, false, "arrow_Z"); pcl::visualization::PointCloudColorHandlerCustom<PointType> color_handler(cloud, 255, 0, 0); //输入的初始点云相关 viewer.addPointCloud(cloud, color_handler, "cloud"); viewer.addCube(bboxT, bboxQ, whd(0), whd(1), whd(2), "bbox"); viewer.setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_REPRESENTATION, pcl::visualization::PCL_VISUALIZER_REPRESENTATION_WIREFRAME, "bbox"); viewer.setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 1.0, 0.0, 0.0, "bbox"); viewer.addArrow(pcX, cp, 1.0, 0.0, 0.0, false, "arrow_x"); viewer.addArrow(pcY, cp, 0.0, 1.0, 0.0, false, "arrow_y"); viewer.addArrow(pcZ, cp, 0.0, 0.0, 1.0, false, "arrow_z"); viewer.addCoordinateSystem(0.5f * sc1); viewer.setBackgroundColor(1.0, 1.0, 1.0); while (!viewer.wasStopped()) { viewer.spinOnce(100); } return 0; }
运行时出现以下报错:
1>D:\PCL\new\pcl\Project1\pcl_test.cpp(97,7): error C2672: “pcl::transformVector”: 未找到匹配的重载函数 1>D:\PCL\new\pcl\Project1\pcl_test.cpp(97,59): error C2784: “void pcl::transformVector(const Eigen::Matrix<_Scalar,3,1,0,3,1> &,Eigen::Matrix<_Scalar,3,1,0,3,1> &,const Eigen::Transform<Scalar,3,2,0> &)”: 未能从“Eigen::Block<Derived,3,1,true>”为“const Eigen::Matrix<_Scalar,3,1,0,3,1> &”推导 模板 参数 1> with 1> [ 1> Derived=Eigen::Matrix<float,3,3,0,3,3> 1> ]
代码报错的位置:
//变换到原点的点云主方向 PointType op; op.x = 0.0; op.y = 0.0; op.z = 0.0; Eigen::Vector3f px, py, pz; Eigen::Affine3f tm_aff(tm); pcl::transformVector((eigenVectorsPCA.col(0)), px, tm_aff); pcl::transformVector(eigenVectorsPCA.col(1), py, tm_aff); pcl::transformVector(eigenVectorsPCA.col(2), pz, tm_aff);
在说明解决方法之前,需要了解pcl::transformVector的调用参数格式。
/** \brief Transform a vector using an affine matrix * \param[in] vector_in the vector to be transformed * \param[out] vector_out the transformed vector * \param[in] transformation the transformation matrix * * \note Can be used with \c vector_in = \c vector_out */ template <typename Scalar> inline void transformVector (const Eigen::Matrix<Scalar, 3, 1> &vector_in, Eigen::Matrix<Scalar, 3, 1> &vector_out, const Eigen::Transform<Scalar, 3, Eigen::Affine> &transformation) { vector_out = transformation.linear () * vector_in; }
可以清晰看到transformVector中三个参数类型。在debug中运行至出现报错之前,发现px、py、pz是符合vector_out,结合报错信息发现是eigenVectorsPCA.col(1)不符合要求,但按照理解应该是符合vector_in,但是运行的时候会报错。因此,想试试通过新建的一个变量代替eigenVectorsPCA.col(i)(i=0,1,2)。
替换代码如下:
Eigen::Vector3f PCAcol2 = eigenVectorsPCA.col(0).cross(eigenVectorsPCA.col(1)); Eigen::Vector3f PCAcol0 = eigenVectorsPCA.col(1).cross(eigenVectorsPCA.col(2)); Eigen::Vector3f PCAcol1 = eigenVectorsPCA.col(2).cross(eigenVectorsPCA.col(0));
// eigenVectorsPCA.col(2) = eigenVectorsPCA.col(0).cross(eigenVectorsPCA.col(1)); //校正主方向间垂直
// eigenVectorsPCA.col(0) = eigenVectorsPCA.col(1).cross(eigenVectorsPCA.col(2));
//eigenVectorsPCA.col(1) = eigenVectorsPCA.col(2).cross(eigenVectorsPCA.col(0));
报错部分代码修改如下:
pcl::transformVector(PCAcol0, px, tm_aff);
pcl::transformVector(PCAcol1, py, tm_aff);
pcl::transformVector(PCAcol2, pz, tm_aff);
点击运行,运行成功。运行结果如下所示:
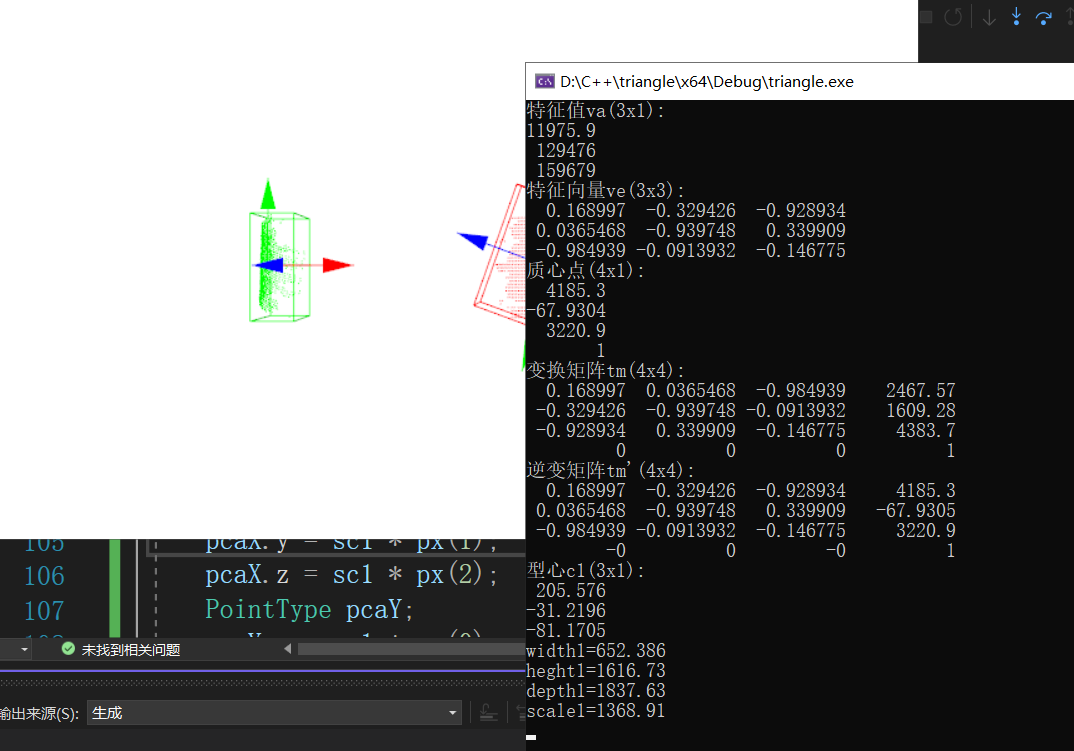
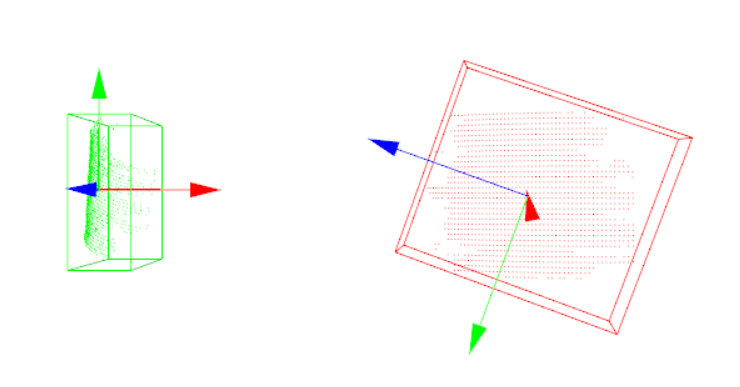

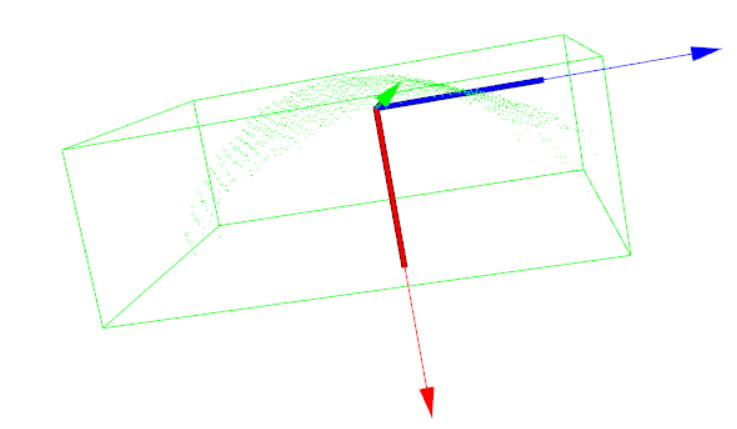
从上述运行结果来看,是实现了点云数据的最小包围盒。
如果发现有什么错误,希望大家可以指出。

【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步