计算机图形学入门笔记(四)(L13-L16)
L13 Ray Tracing1(Whitted-Style Ray Tracing)
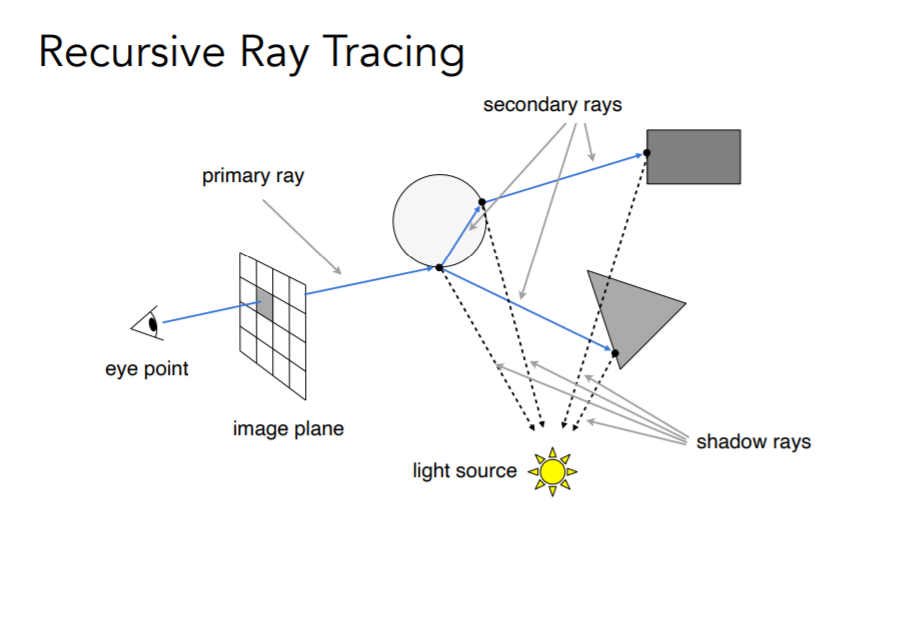
基本操作如上
就是对于每个像素点,将这个点与相机连线,这一束光打在其他物体上,最后能到达光源的能量总和作为该点亮度
对于一根从光源射出的射线,记\(\pmb{r}(t)=\pmb{o}+t\pmb{d}\),其中\(\pmb{o}\)为原点(也就是光源坐标),\(\pmb{d}\)为方向,\(t\geq 0\)
- 直线与球的交点
其中\(\pmb{p},\pmb{c}\)为点的坐标和圆心坐标
联立得
- 一般的显式方程\(f(p)=0\)
带入得\(f(\pmb{o}+t\pmb{d})=0\)
我们只要求正的实根 - 与三角形面片
我们只要先与这个三角形所在的平面算交点,再判断这个交点是不是在三角形内即可
平面方程\((\pmb{p}-\pmb{p_0})*\pmb{n}=0\)
带入解得
判断点是否在三角形内之前讲过,直接三个叉乘
Moller Trumbore Algorithm
通过重心坐标直接判断
具体操作是解线性方程组
推导:
令\(\vec{e_1} = p_1 - p_0, \vec{e_2} = p_2 - p_0, \vec{s} = o-p_0\)
即$$-t*\pmb{d}+b_1\pmb{e_1}+b_2\pmb{e_2}=\pmb{s}$$
由于这些向量有三个坐标,方程有三个未知数,因而可以解出
也等于
令\(\vec{s_1}=\vec{d}\times\vec{e_2},\vec{s_2}=\vec{s}\times\vec{e_1}\)
若线与平面相交,则\(t\geq 0\)
若线与三角形相交,则\(t\geq 0\)且\(0\leq b_1,b_2\)且\(b_1+b_2\leq 1\)
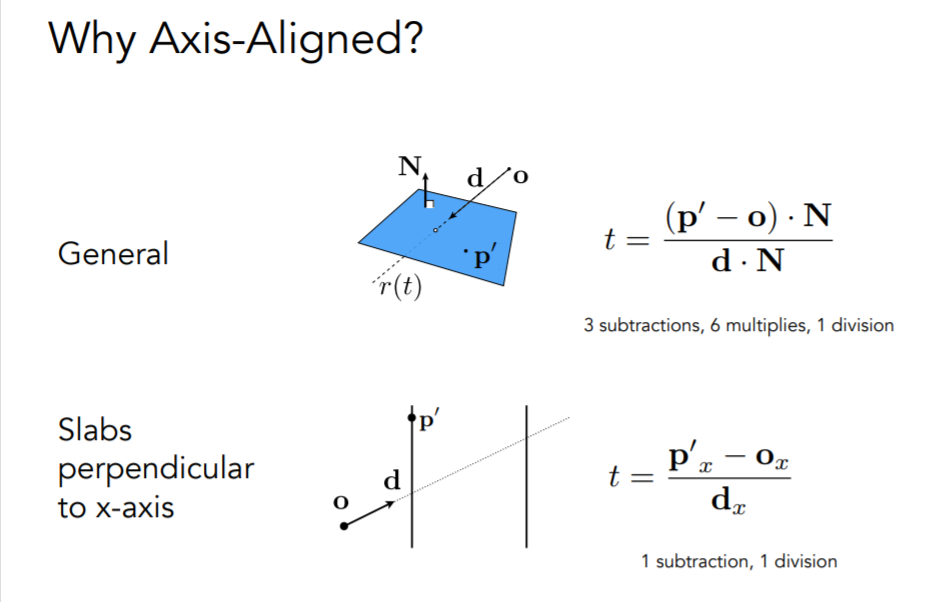
Axis-Aligned Bounding Box(轴对称包围盒)
对一个物体求一个包围盒,也就是在三个维度上的左边界,右边界所围成的区域
因而可以算出来对于每一根轴(比如说x轴的)\(t_{x~enter},t_{x~exit}\)
所以光线在这个包围盒内部的部分就是\(t_{x~enter}\leq t\leq t_{x~exit}\)
对三根轴分别考虑,\(t_{enter}=\max{t_{enter}},t_{exit}=\min{t_{exit}}\)
所以如果\(t_{enter}<t_{exit}\)则这束光与Bounding Box有交点
有两种特殊情况:
- \(t_{exit}<0\),此时包围盒必定在原点的反方向,所以没有交点
- \(t_{exit}\geq 0\)且\(t_{enter}<0\),此时原点必定在包围盒内,所以必有交点
所以综上,光线和包围盒有交点当且仅当\(t_{enter}<t_{exit}\)且\(t_{exit}\geq 0\)
为什么用这个?直接看图吧
L14 Ray Tracing 2 (Acceleration&Radiometry)
加速结构:
Spatial Partition(空间划分)
- Uniform(Grids)
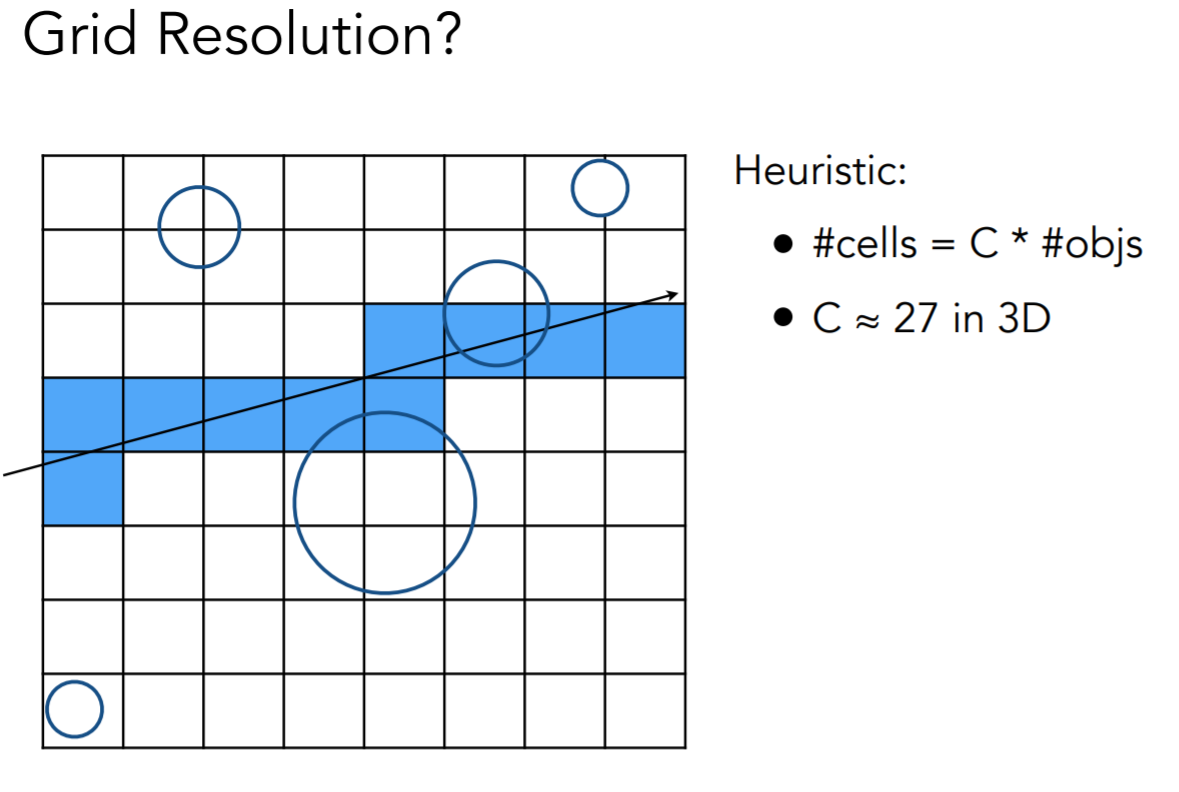
标记每一个存在物体表面(比如上图的圆环)的格子
如果光线通过被标记的格子,再去看和物体是否相交
在物体多且均匀的时候比较好用 - 四/八/\((2^n)\)叉树
- BSP-Tree 二叉树
- KD-Tree
建树:
非叶结点存储:
在哪个轴划分,划分的坐标
指向子结点的指针
叶节点存储:
物体列表
工作:
如果光线和这个结点代表的Box有交点,递归到子节点
如果这个结点是叶结点,判定与Box内物体是否有交点
缺点:
三角形和Box求交并不好求,且一个物体会被存储在多个叶结点内
Object Partition(物体划分)
Bounding Volume Hierarchy(BVH)
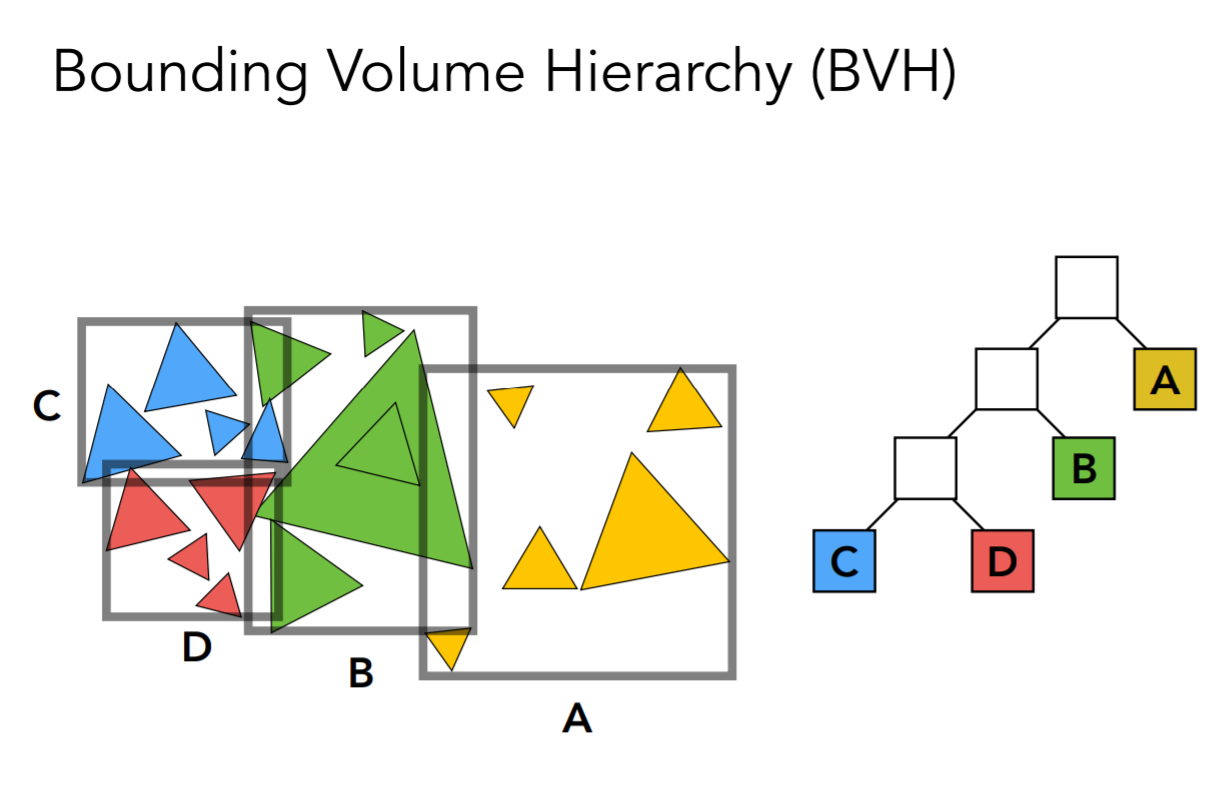
划分方法:
- 选最长的轴划分
- 在中间的三角形处划分
非叶节点存储:
Box,指向子结点的指针
叶结点存储:
Box,物体列表
优:每个物体只会在一个Box里(实现容易)
缺:各个Box可能重叠
L15 Ray Tracing 3 (Light Transport&Global Illumination)
Radiometry(辐射度量学)
Definition:Radiant energy is the energy of electromagneticradiation.
It is measured in units of joules, and denoted by the symbol \(Q[J]\)
Definition:Radiant flux (power) is the energy emitted, reflected, transmitted or received, per unit time.
Definition:The radiant (luminous) intensity is the power per unit solid angle emitted by a point light source.
Defination:Solid angle is the ratio of subtended area on sphere to radius squared.**
Isotropic Point Source(各向同性点光源)
Definition: The irradiance is the power per unit area(projected) incidention a surface point.
Definition: The radiance (luminance) is the power emitted, reflected, transmitted or received by a surface, per unit solid angle, per projected unit area.
• Radiance: Irradiance per solid angle
• Radiance: Intensity per projected unit area
Bidirectional Reflectance Distribution Function (BRDF)
双向反射分布函数:从某个方向射入的光线,在经过表面反射后在各个方向上的能量分布情况
反射方程
对入射光线分析
对出射光线分析
所以有BRDF函数
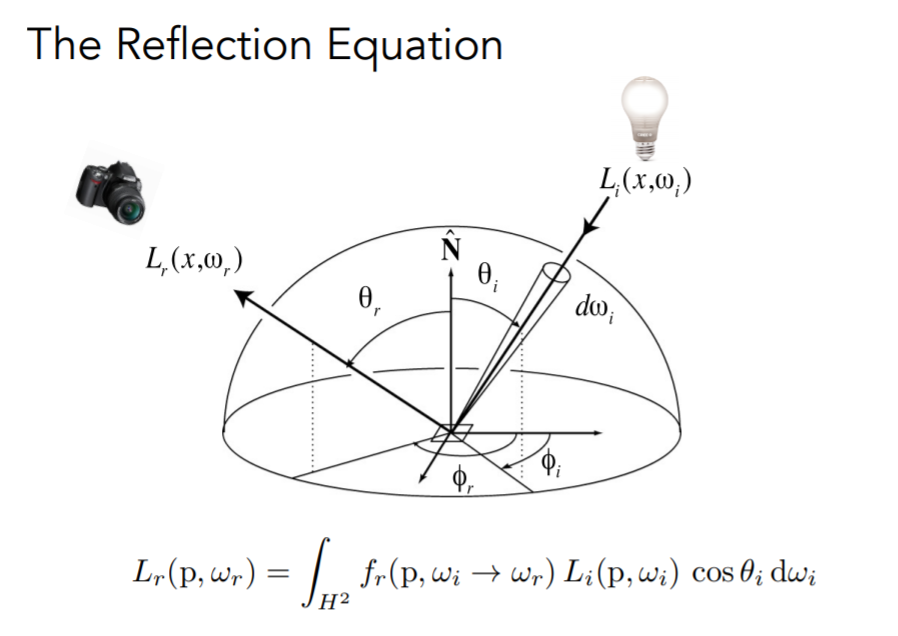
解释:对于一个方向\(r\)所收到的光线,等于把所有方向入射然后再反射到这个方向的能量积分
\(p\)是面积,\(H^2\)是Unit Hemisphere(单位半球),\(cos\theta_i\)这一项是因为前面那些面积都是投影面积,所以要乘一个\(cos\theta_i\)(类比一下向量点乘,和之前的blinn-phong光照模型)
然而众所周知,光线可以射来射去,也就是说这个地方的出射光线可能又会影响到入射光线
套娃警告
渲染方程
考虑到物体本身也可能会发光
其中\(L_e\)这一项是自身发光,\(\Omega^+\)是指能射到该点的区域,之前直接取了上半球面,\(n*\omega_i\)相当于\(cos\theta_i\)(因为两个都是单位向量)
注意:和blinn-phong模型一样,这里假定所有方向都是从这个点指向外面的!
渲染方程的求解方法
没听懂,果然还要去学数值计算啊
上面标红的是未知项,其它的都是已知项
所以我们可以简写为一个算子方程
最后那个\(K\)被称为核函数,或者是光线传播算子
然后我们可以把它变成一个乘积形式(可能是卷积???)
然后变成了一个矩阵方程
这个展开,很nb
所以我们可以直接取前几项算,其中\(E\)是物体本身光线,\(KE\)是被照射的光线,\(K\)的多少次方就是经过多少次反射(散射,折射等等)后再打到物体表面
其中二次以上的统称为全局光照,光栅化一般只能处理局部光照(也就是零次和一次项)
L16 Ray Tracing 4 (Monte Carlo Path Tracing)
前置:蒙特卡罗积分(数值积分)
就是直接采样,取点平均
Path Tracing
引入:前面学的 Whitted-Style Ray Tracing 的问题:
- 镜面就全部镜面反射
- 漫反射处不继续反射,直接计算阴影
计算的话之前套蒙特卡罗和上面那个渲染方程,其中\(p=\frac{1}{2\pi}\)(因为是对半球面积分,而整个球面的立体角是\(4\pi\))
所以我们可以写出伪代码
shade(p, wo)
Randomly choose N directions wi~pdf
Lo = 0.0
For each wi
Trace a ray r(p, wi)
If ray r hit the light
Lo += (1 / N) * L_i * f_r * cosine / pdf(wi)
Return Lo
其中\(L_i\)是光源强度,\(pdf\)是概率密度函数,就是\(p\)
然而有一个问题:如果一束光先打到某一个物体,再打到这个物体上,这一部分并没有被计算
所以更新版本
shade(p, wo)
Randomly choose N directions wi~pdf
Lo = 0.0
For each wi
Trace a ray r(p, wi)
If ray r hit the light
Lo += (1 / N) * L_i * f_r * cosine / pdf(wi)
Else If ray r hit an object at q
Lo += (1 / N) * shade(q, -wi) * f_r * cosine / pdf(wi)
Return Lo
还有一个问题:每个点都去取,比如说\(100\)束光,那么这样下去要\(trace\)的光数量会指数上涨(每次乘100)
所以我们每次只取一束光
shade(p, wo)
Randomly choose ONE direction wi~pdf(w)
Trace a ray r(p, wi)
If ray r hit the light
Return L_i * f_r * cosine / pdf(wi)
Else If ray r hit an object at q
Return shade(q, -wi) * f_r * cosine / pdf(wi)
Path Tracing指的就是这种只取一束的
但是这样误差有点大
但是我们是对每一个像素计算
所以相机对像素内随机许多点发出一束光即可
ray_generation(camPos, pixel)
Uniformly choose N sample positions within the pixel
pixel_radiance = 0.0
For each sample in the pixel
Shoot a ray r(camPos, cam_to_sample)
If ray r hit the scene at p
pixel_radiance += 1 / N * shade(p, sample_to_cam)
Return pixel_radiance
然而还有一个问题:递归的终止条件是什么?
俄罗斯轮盘赌(RR)!
奇怪的命名增加了
首先设置一个概率\(P\)
对于每一次调用\(shade\)函数,
- 以概率\(P\)接受,最后返回\(\frac{L_o}{P}\)
- 以概率\(1-P\)拒绝,直接返回0
这个方法的妙处在于\(E(L_0)=P*\frac{L_0}{P}+(1-P)*0=L_o\)
也就是期望不变!
Manually specify a probability P_RR
shade(p, wo)
Randomly select ksi in a uniform dist. in [0, 1]
If (ksi > P_RR) return 0.0;
Randomly choose ONE direction wi~pdf(w)
Trace a ray r(p, wi)
If ray r hit the light
Return L_i * f_r * cosine / pdf(wi) / P_RR
Else If ray r hit an object at q
Return shade(q, -wi) * f_r * cosine / pdf(wi) / P_RR
问题是无穷无尽的:
如果光源占的立体角很小,那么就会有很多光线被浪费掉,性能损耗大
所以我们可以通过换元,换成对面积积分
渲染方程重写一遍:
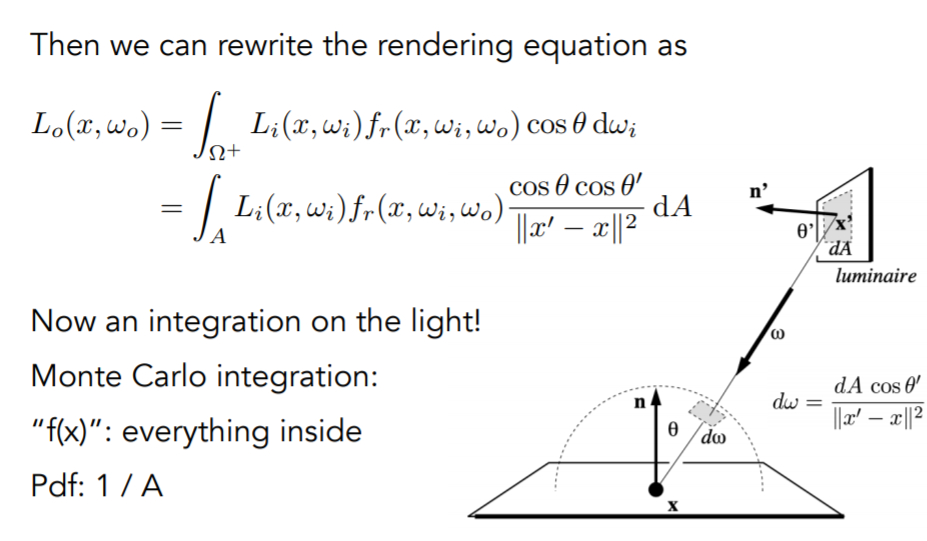
进一步优化:
光源来的光线可以无视多次弹射,直接计算(通过换元对面积积分),所以也不需要RR
其他物体弹射的光线需要RR,不需要换元
shade(p, wo)
# Contribution from the light source.
Uniformly sample the light at x’ (pdf_light = 1 / A)
If the ray is not blocked
L_dir = L_i * f_r * cos θ * cos θ’ / |x’ - p|^2 / pdf_light
# Contribution from other reflectors.
L_indir = 0.0
Test Russian Roulette with probability P_RR
Uniformly sample the hemisphere toward wi (pdf_hemi = 1 / 2pi)
Trace a ray r(p, wi)
If ray r hit a non-emitting object at q
L_indir = shade(q, -wi) * f_r * cos θ / pdf_hemi / P_RR
Return L_dir + L_indir
关于时间
784*784,spp=16的一张图,用上面这个方法,需要一个3.4GHz的核心跑6min,恐怖如斯
There is a negligible beginning in all great action and thought.

