


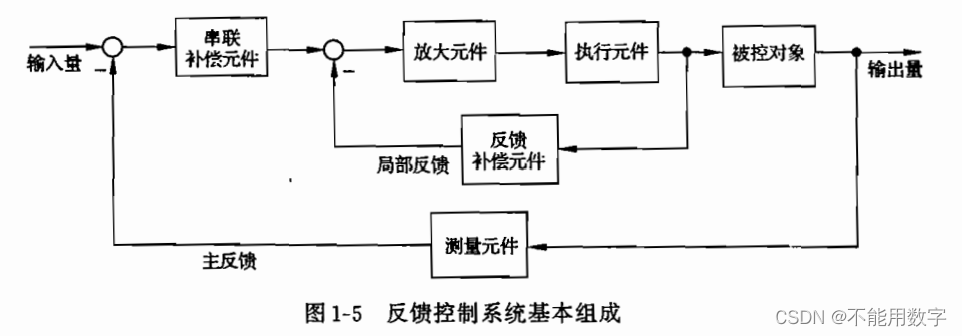
PID控制器,是一种利用偏差进行控制的反馈控制系统。反馈控制方式的特点是不管什么原因使被控量偏离期望值而出现偏差,都产生一个相应的控制作用减小这个偏差,使被控量与期望值趋于一致。
通过测量第i个周期内被控对象的实际输出量,可以将其与期望值进行比较,得到一个周期内的偏差值Δ(i)。所谓PID算法的主要内容就是如何处理Δ(i),补偿输入量,使得被控量尽可能接近期望值。
处理偏差最简单直接的方法是“缺多少补多少”,例如在第i个周期输出量偏差值为Δ(i),就在第i+1个周期的输入量中加上Δ(i)。这实际上就是仅有比例调节的情况下,比例调节系数Kp为1时的控制法。
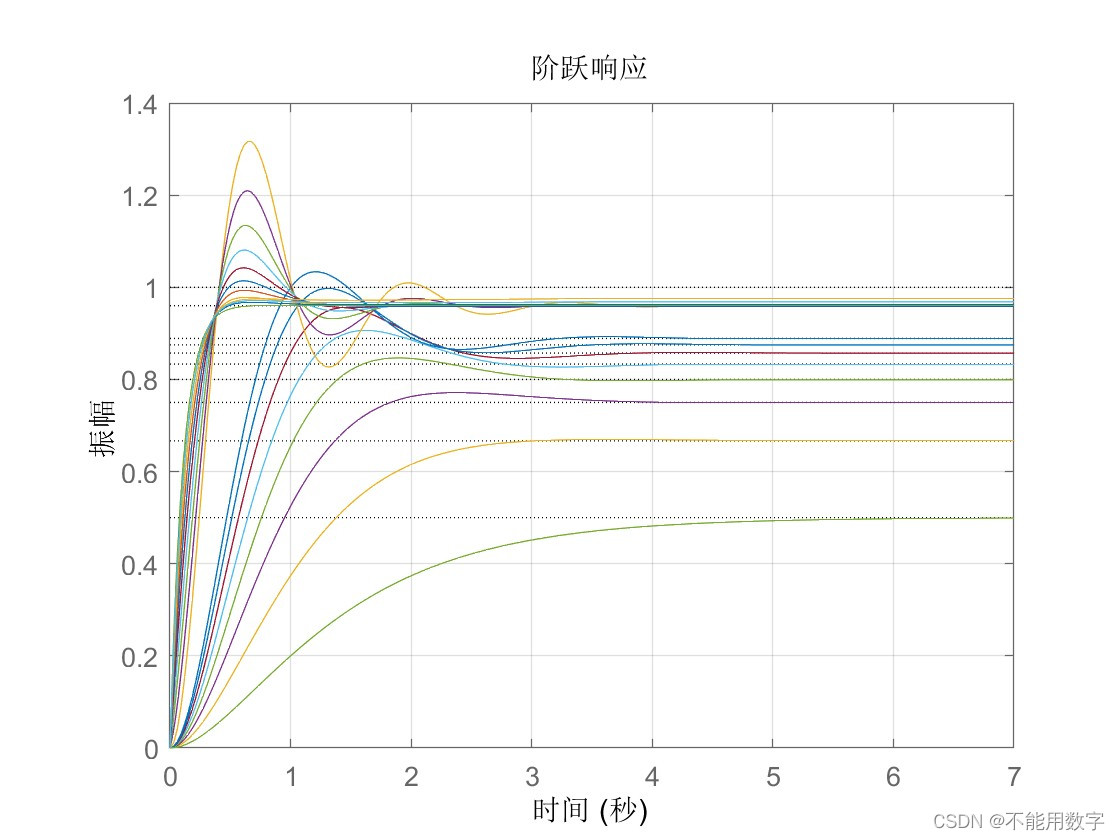
比例调节(Proportion)的特点是反映快,且容易产生超调现象。超调的表现是输出量大幅震荡,由Kp过大导致。反之,Kp过小则表现为输出量收敛速度慢。此外,仅仅简单地设定Kp为1并不一定能使得系统输出量的偏差逐渐减小。
假设我们的控制对象在一根数轴上,数轴的原点是期望值,输出量的向量为偏差,很显然,要使得控制对象一直在原点附近,应该让在这段时间内所有向量的代数和为零,即ΣΔ(j)=0 ,这也是保持在原点的控制对象的性质。
积分调节(Integral)利用过去多个周期的偏差值补偿,直观上,积分调节对于带有一定“趋势”的、累计的偏差较为敏感,但对于短时间内的大幅度变化,积分调节会带有惯性。积分调节的贡献一是降低静态误差,在输出曲线平衡状态上表现为更加平稳,二是减少达到稳定所需的时间。另外,位置型和增量型PID在积分时间段上有所不同,位置型PID的积分区域为所有时期的累加值,而增量型PID仅对前一段时间做积分。
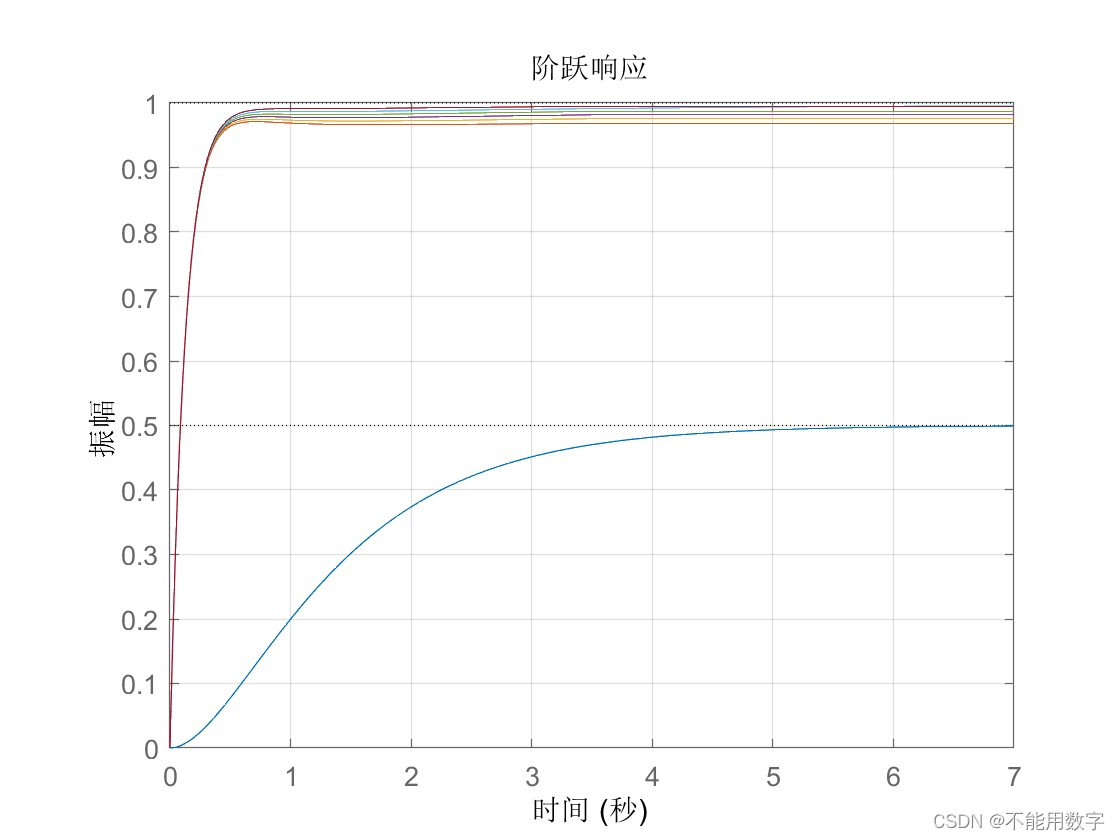
图2 Ki的影响,消除稳态误差
微分调节(Differential)针对误差的一阶导进行控制。误差增加/减少得快,微分调节输出就大,反之则输出小。直观上,微分调节像一种阻尼力,如同掉进泥潭。这一阶段的主要贡献是增加稳定性,减少超调。但注意Kd过大会引起不必要的震荡。
