
中断按键驱动程序引入异步通知
学习目的:
- 理解Linux中的异步通知机制
- 加入异步通知机制,优化中断方式按键驱动程序
前面实现了查询方式、中断方式不同按键驱动程序,测试过程中,我们发现在查询方式中,应用程序需要不断轮询获取按键状态值,这种方式极大的耗费CPU资源。中断方式中,应用程序读取按键值时,如果无按键按下,应用程序将进入休眠,直到按键按下触发中断,中断服务函数中唤醒当前应用程序,如长时间无按键按下,应用程序不被唤醒,这个过程不能执行其他任务。显然,中断方式比查询方式占用CPU资源少,但这两个驱动程序都有相关共性,都是应用程序主动的去调用函数读取按键值,有没有一种机制当有数据值可以读时,驱动程序通知应用程序,让应用程序来读取信息呢?今天我们引入的异步通知就实现了这种机制!
1、异步通知机制原理
异步通知机制是通过信号来实现的,大致可以概况为:应用层调用signal函数设置相应信号的捕获和信号处理函数,当驱动程序中有有效数据读取时,发送相应信号,应用程序中的信号处理函数将被系统自动调用。一般在信号处理函数中读取通知就绪的数据,这样使得无阻塞IO的应用程序不用轮询是否有数据可获取,不需要使用阻塞的IO进行休眠等待。
根据以上描述,可以看出实现异步通知机制应用程序需做的事情包含以下两部分:
①、设置相关信号的捕获和信号的处理函数
②、信号由驱动程序来发送,但驱动程序需要知道信号发送给那个应用程序,也就是说应用程序需要告诉驱动自己的进程ID
③、让驱动程序支持异步机制
除应用程序外,驱动程序也需实现以下两项内容:
①、获取打开设备驱动程序的应用程序的进程ID
②、有数据可以获取时,发送信号通知应用程序
应用程序和驱动程序具体实现细节,如下框图所示:
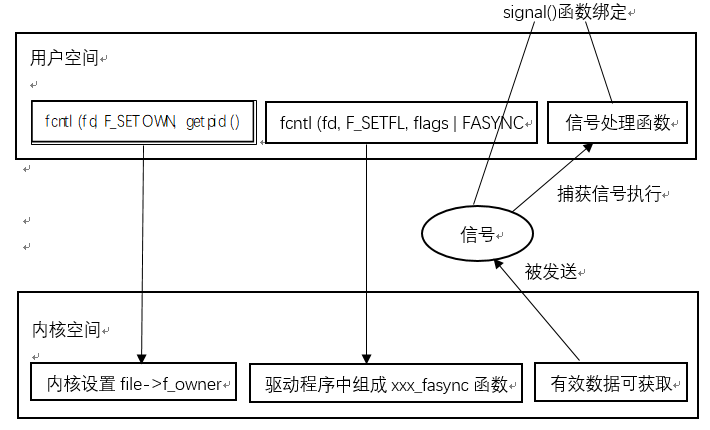
首先应用程序调用signal函数绑定信号和信号处理函数 ,调用fcntl告诉内核当前进行的ID,调用fcntl获取当前进行标识,调用fcntl设置设备文件支持FASYNC,即异步通知模式。
驱动程序获取应用程序进程ID,file->f_owner当用户调用fcntl(fd,F_SETOWN,getpid())时,由内核自动设置。
驱动程序中同时需实现file_operation结构体中的.fasync成员,fasync中调用fasync_helper初始化用于描述异步通知数据结构。
驱动程序中还需实现可获取有效数据时,调用kill_fasync 函数发送信号。
2、按键驱动程序的异步通知实现
按照1中的分析,驱动程序中需实现 file_operation结构体中的.fasync成员和有效数据可获取时发送信号
static int button_drv_fasync (int fd, struct file *filp, int on); { printk("driver: sixth_drv_fasync\n"); return fasync_helper (fd, filp, on, &button_async); }
按键按下,此时可获取按键有效信息,在按键中断程序中调用kill_fasync发送信号
static irqreturn_t button_irq_handle(int irq, void *dev_id) { struct button_desc *pdesc = NULL; unsigned char pin_val; pdesc = (struct button_desc *)dev_id; pin_val = gpio_get_value(pdesc->pin); if(pin_val == 1) { key_status = pdesc->key_val | 0x80; } else { key_status = pdesc->key_val; } event_trig = 1; wake_up_interruptible(&button_waitq); kill_fasync (&button_async, SIGIO, POLL_IN); return IRQ_RETVAL(IRQ_HANDLED); }
3、应用程序实现
应用程序调用signal函数绑定信号和信号处理函数 ,调用fcntl告诉内核当前进行的ID,调用fcntl获取当前进行标识,调用fcntl设置设备文件支持FASYNC,即异步通知模式,主函数代码如下
int main(int argc, char **argv) { int flags; fd = open("/dev/button", O_RDWR); if(fd == -1) { printf("can't open...\n"); exit(EXIT_FAILURE); } signal(SIGIO, handler_fcn); //设置信号的处理函数 fcntl(fd, F_SETOWN, getpid()); flags = fcntl(fd, F_GETFL); fcntl(fd, F_SETFL, flags | FASYNC); while(1) { sleep(100); } exit(EXIT_SUCCESS); }
驱动程序完整代码


#include <linux/module.h> #include <linux/kernel.h> #include <linux/fs.h> #include <linux/init.h> #include <linux/delay.h> #include <linux/irq.h> #include <asm/uaccess.h> #include <asm/irq.h> #include <asm/io.h> #include <plat/gpio-fns.h> #include <mach/gpio-nrs.h> #include <linux/interrupt.h> #include <linux/wait.h> #include <linux/sched.h> #include <linux/device.h> #include <linux/gpio.h> #include <linux/poll.h> #define BUTTON_NUMS 4 #define IRQT_BOTHEDGE IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING static int major; static int event_trig = 0; static unsigned char key_status; static volatile unsigned long *gpfcon = NULL; static volatile unsigned long *gpgcon = NULL; static volatile unsigned long *gpfdat = NULL; static volatile unsigned long *gpgdat = NULL; static struct class *button_drv_class; static struct class_device *button_drv_class_dev; static struct fasync_struct *button_async; static DECLARE_WAIT_QUEUE_HEAD(button_waitq); struct button_desc { int pin; int irq_type; unsigned long flags; char *name; int key_val; }; static struct button_desc btn_desc[BUTTON_NUMS] = { {S3C2410_GPF(0), IRQ_EINT0, IRQT_BOTHEDGE, "S2", 1}, {S3C2410_GPF(2), IRQ_EINT2, IRQT_BOTHEDGE, "S3", 2}, {S3C2410_GPG(3), IRQ_EINT11, IRQT_BOTHEDGE, "S4", 3}, {S3C2410_GPG(11), IRQ_EINT19, IRQT_BOTHEDGE, "S5", 4}, }; static int button_drv_open(struct inode *inode, struct file *file); static ssize_t button_drv_read(struct file *file, char __user *buf, size_t count, loff_t *ppos); static ssize_t button_drv_write(struct file *file, const char __user *buf, size_t count, loff_t *ppos); static int button_drv_close(struct inode *inode, struct file *file); static unsigned button_drv_poll(struct file *file, poll_table *wait); static int button_drv_fasync (int fd, struct file *filp, int on); struct file_operations button_drv_fileop = { .owner = THIS_MODULE, /* 这是一个宏,推向编译模块时自动创建的__this_module变量 */ .open = button_drv_open, .read = button_drv_read, .write = button_drv_write, .release = button_drv_close, .poll = button_drv_poll, .fasync = button_drv_fasync, }; static irqreturn_t button_irq_handle(int irq, void *dev_id) { struct button_desc *pdesc = NULL; unsigned char pin_val; pdesc = (struct button_desc *)dev_id; pin_val = gpio_get_value(pdesc->pin); if(pin_val == 1) { key_status = pdesc->key_val | 0x80; } else { key_status = pdesc->key_val; } event_trig = 1; wake_up_interruptible(&button_waitq); kill_fasync (&button_async, SIGIO, POLL_IN); return IRQ_RETVAL(IRQ_HANDLED); } static int button_drv_open(struct inode *inode, struct file *file) { int i; *gpfcon &= ~((0x3<<(0*2)) | (0x3<<(2*2))); *gpgcon &= ~((0x3<<(3*2)) | (0x3<<(11*2))); /* 注册中断处理函数 */ for(i = 0; i < BUTTON_NUMS; i++) request_irq(btn_desc[i].irq_type, button_irq_handle, btn_desc[i].flags, btn_desc[i].name, &btn_desc[i]); return 0; } static ssize_t button_drv_read(struct file *file, char __user *buf, size_t count, loff_t *ppos) { if(count != 1) return EINVAL; wait_event_interruptible(button_waitq, event_trig); if(copy_to_user(buf, &key_status, count)) return EFAULT; event_trig = 0; return 0; } static ssize_t button_drv_write(struct file *file, const char __user *buf, size_t count, loff_t *ppos) { printk("button_drv_write\n"); return 0; } static int button_drv_close(struct inode *inode, struct file *file) { int i; for(i = 0; i < BUTTON_NUMS; i++) free_irq(btn_desc[i].irq_type, &btn_desc[i]); return 0; } static unsigned button_drv_poll(struct file *file, poll_table *wait) { unsigned int mask = 0; poll_wait(file, &button_waitq, wait); // 不会立即休眠 if (event_trig) mask |= POLLIN | POLLRDNORM; return mask; } static int button_drv_fasync (int fd, struct file *filp, int on) { printk("driver: sixth_drv_fasync\n"); return fasync_helper (fd, filp, on, &button_async); } static int button_drv_init(void) { major = register_chrdev(0, "button_light", &button_drv_fileop); button_drv_class = class_create(THIS_MODULE, "button_drv"); //button_drv_class_dev = class_device_create(button_drv_class, NULL, MKDEV(major, 0), NULL, "button"); /* /dev/button */ button_drv_class_dev = device_create(button_drv_class, NULL, MKDEV(major, 0), NULL, "button"); /* /dev/button */ gpfcon = (volatile unsigned long *)ioremap(0x56000050, 16); gpgcon = (volatile unsigned long *)ioremap(0x56000060, 16); gpfdat = gpfcon + 1; gpgdat = gpgcon + 1; return 0; } static void button_drv_exit(void) { unregister_chrdev(major, "button_drv"); //class_device_unregister(button_drv_class_dev); device_unregister(button_drv_class_dev); class_destroy(button_drv_class); iounmap(gpfcon); iounmap(gpgcon); } module_init(button_drv_init); module_exit(button_drv_exit); MODULE_LICENSE("GPL");
应用程序完整代码
#include <unistd.h> #include <sys/types.h> #include <sys/stat.h> #include <sys/fcntl.h> #include <stdlib.h> #include <stdio.h> #include <poll.h> #include <signal.h> int fd; void handler_fcn(int signum) { int ret; unsigned char key_buf; ret = read(fd, &key_buf, 1); if(ret < 0) { printf("read err...\n"); exit(EXIT_FAILURE); } /* 判断有按键按下,打印按键信息 */ printf("key_val=0x%x\n", key_buf); } int main(int argc, char **argv) { int flags; fd = open("/dev/button", O_RDWR); if(fd == -1) { printf("can't open...\n"); exit(EXIT_FAILURE); } signal(SIGIO, handler_fcn); //设置信号的处理函数 fcntl(fd, F_SETOWN, getpid()); flags = fcntl(fd, F_GETFL); fcntl(fd, F_SETFL, flags | FASYNC); while(1) { sleep(100); } exit(EXIT_SUCCESS); }
测试结果

