电路方案分析(三)两轮自平衡小车
两轮自平衡小车一直是近几年来毕设,课设的热点,这回带来一篇比较优秀的设计,有完整代码的
1.原理图架构
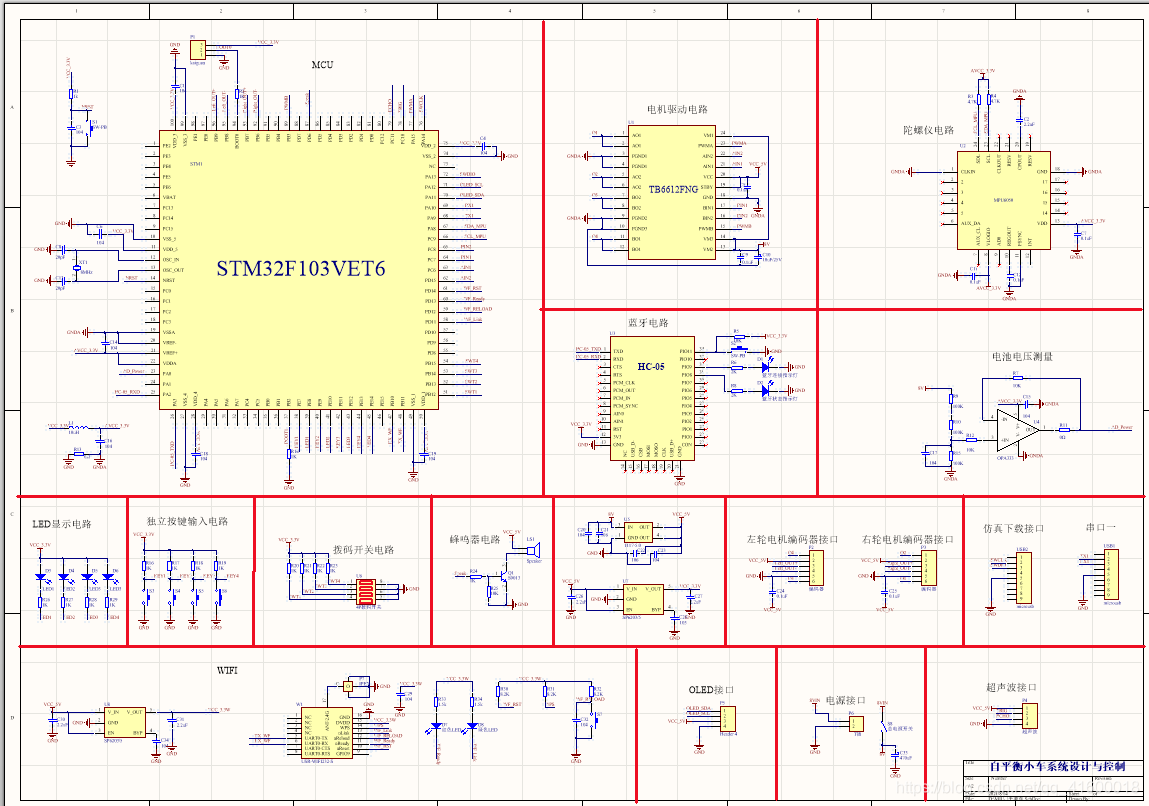
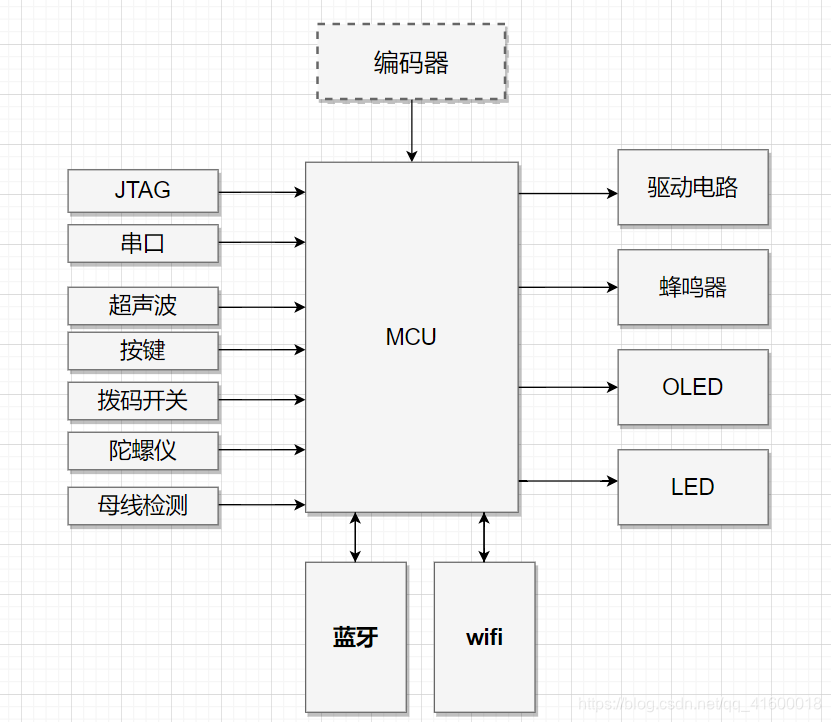
大概整理了一下原理图的结构,少了电源部分,电源是电池供电,输入7.2~8V左右,用两个LDO,变成5V,3.3V。
2.单片机最小系统
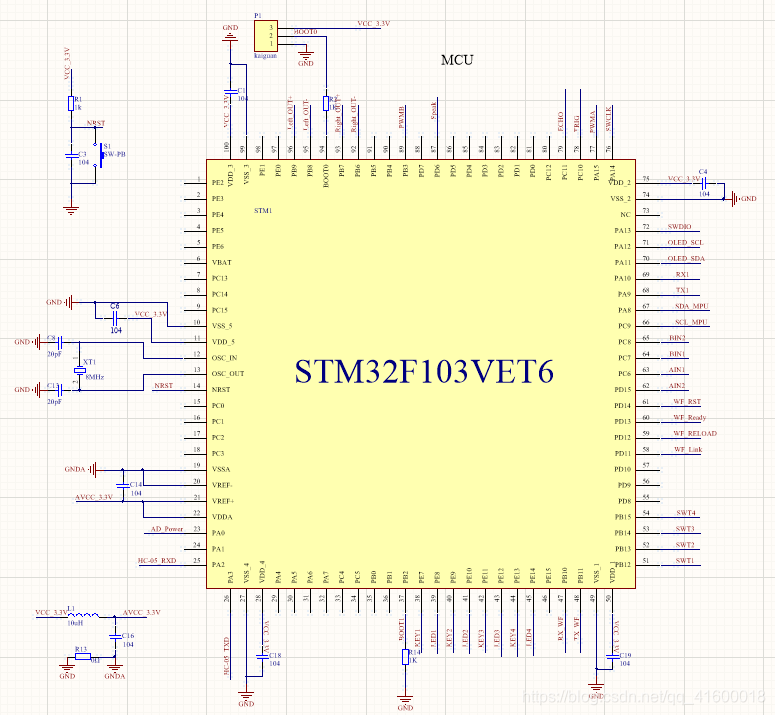
单片机用的是STM32F103系列,从原理图结构上看得出,外设完全够用。用的外设我没有整体总结,后面分模块介绍具体用到什么外设。
3.电源
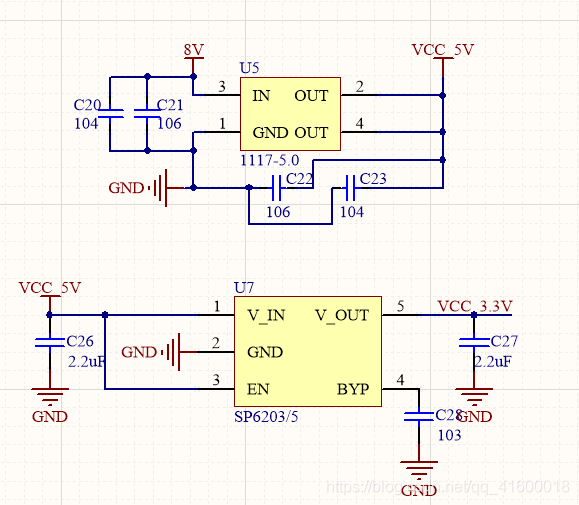
通信芯片和主芯片都是3.3V供电,所以3.3V的带载能力要强一些。并且3.3V电源给到采集电路,所以3.3V电源的纹波要求要小。大概可以估算一下,峰值电流输出不能小于500mA。
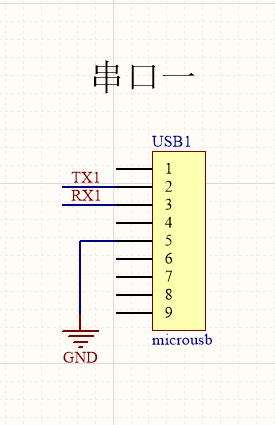
4.通讯电路
串口:
蓝牙:
无线通讯方案有两种设计,蓝牙和WIfi两种空中接口作无线通讯。
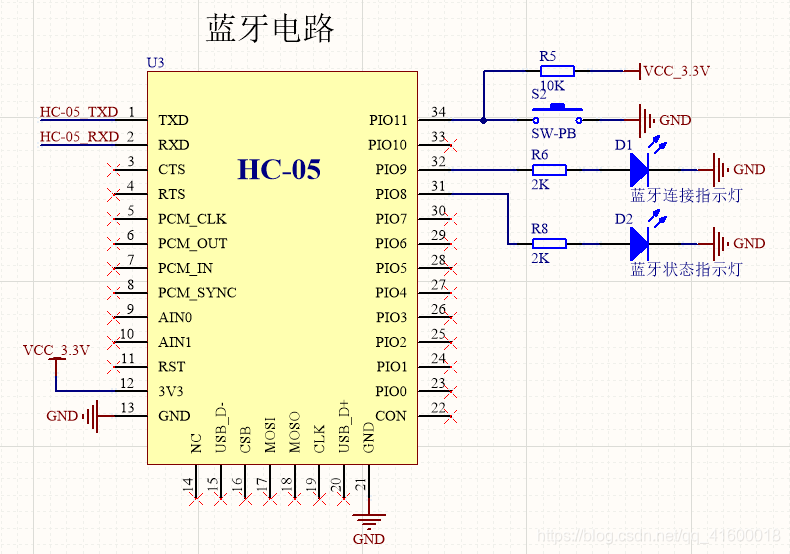
用的是现在市面上成熟并且成本低的蓝牙模块,HC-05.和单片机之间串口通讯。
wifi:
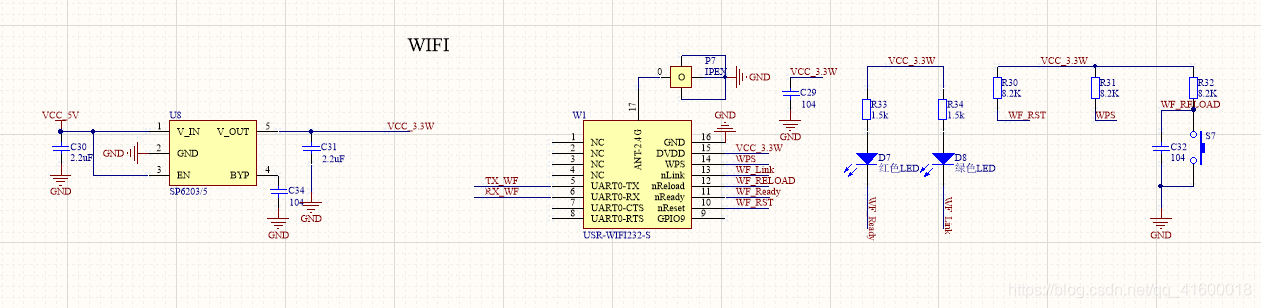
wifi模块单独供电,wifi模块的功耗比较高,和单片机之间也是串口通讯,这样的话在满足通讯速度的前提下,软件开发起来相对简单。
5.传感器接口
既然是电机平衡控制,传感器肯定少不了陀螺仪+编码器和电机控制电路的母线采集,超声波避障接口,母线采集的是给电机供电的8V电池电源。
陀螺仪:
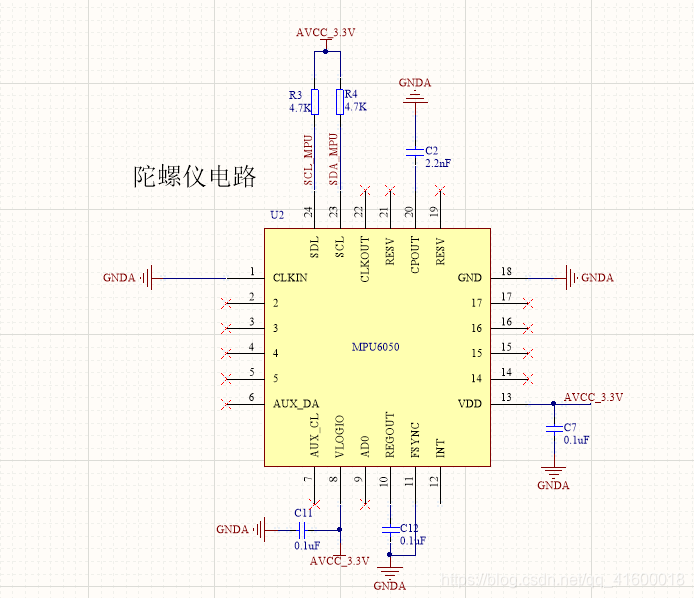
市面上比较成熟的MPU6050,开发成本小。与单片机IIC通讯。
编码器和电机接口:
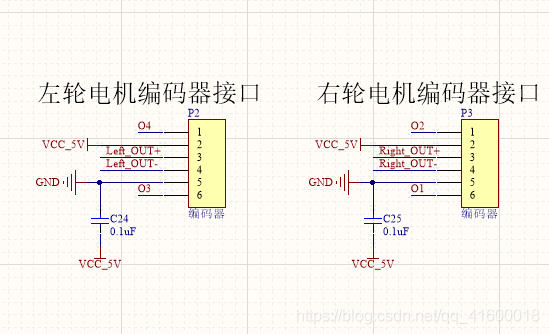
双电机,需要两个编码器,编码器回传的是数字信号。
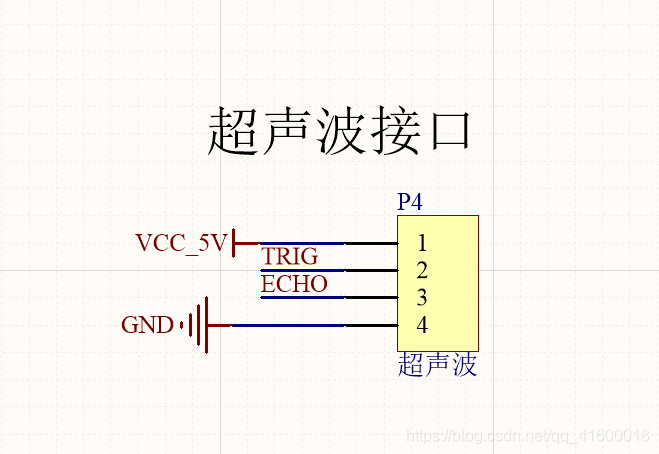
超声波接口:一个trig触发信号和ECHO回读信号
母线采集电路;
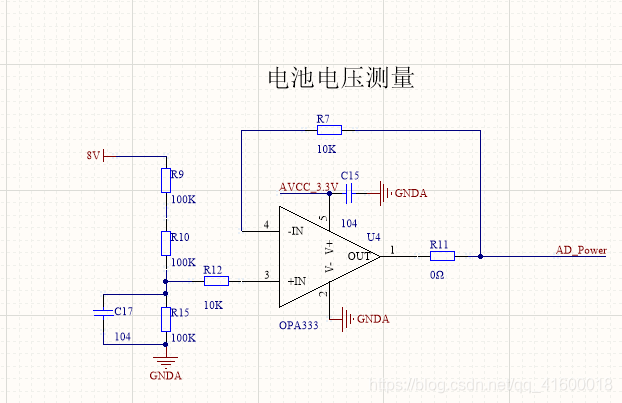
8V经过分压后的三分之一经过1:1运放输出到单片机的ADC口。
6.驱动电路:
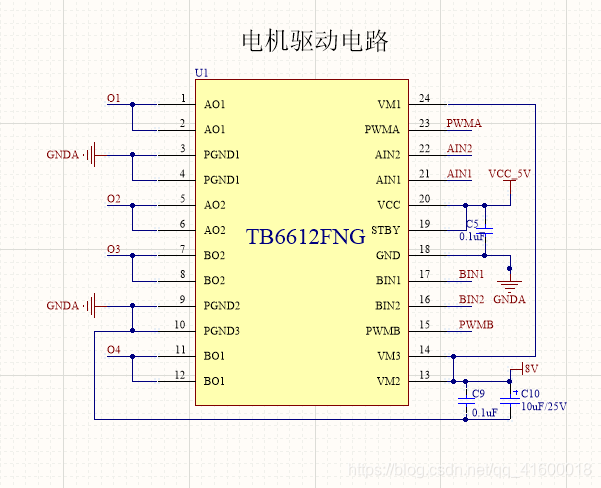
电机驱动电路用集成芯片TB6612FNG PWM驱动两路电机。

7.其他接口电路

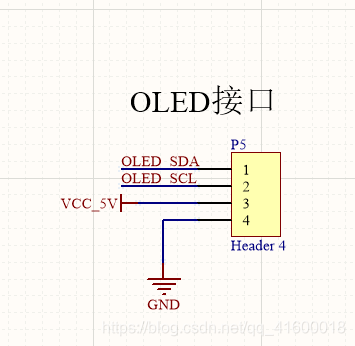
最后是一个小的显示屏,也是IIC通信。
代码要的人太多了,就不一一发了,
放在资源里了,没有设置动态调分https://download.csdn.net/download/qq_41600018/21105730

 浙公网安备 33010602011771号
浙公网安备 33010602011771号