电路方案分析(十六)带有C2000微控制器且精度为 ±0.1° 的分立式旋转变压器前端参考设计
带有C2000微控制器且精度为 ±0.1° 的分立式旋转变压器前端参考设计
tips:参考Ti设计资源:TIDA-01527
旋转变压器详细介绍:
https://blog.csdn.net/qq_41600018/article/details/127597875?spm=1001.2014.3001.5501
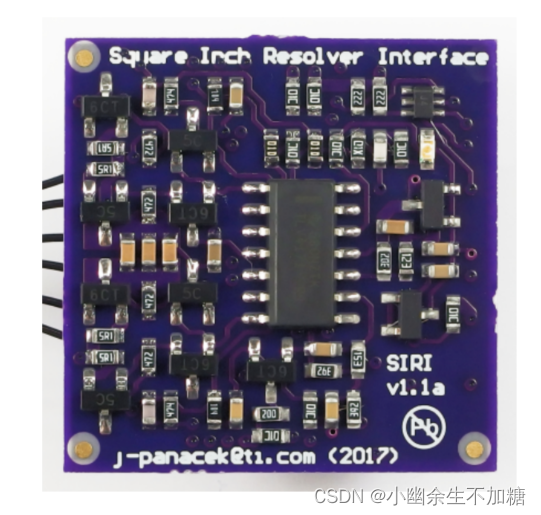
该参考方案设计是适用于旋转变压器传感器的励磁放大器和模拟前端。该设计在尺寸大小仅为 1 平方英寸的印刷电路板 (PCB) 上实施分立式组件和标准运算放大器。提供的算法和代码示例使用了 C2000™微控制器 (MCU)LaunchPad™开发套件,通过 TMS320F28069M MCU来进行信号处理和角度计算。
该参考方案设计使用了创新的散射信号处理方法。该方法将系统精度提高了 250%,同时还将硬件成本和复杂性保持在合理水平。
特性
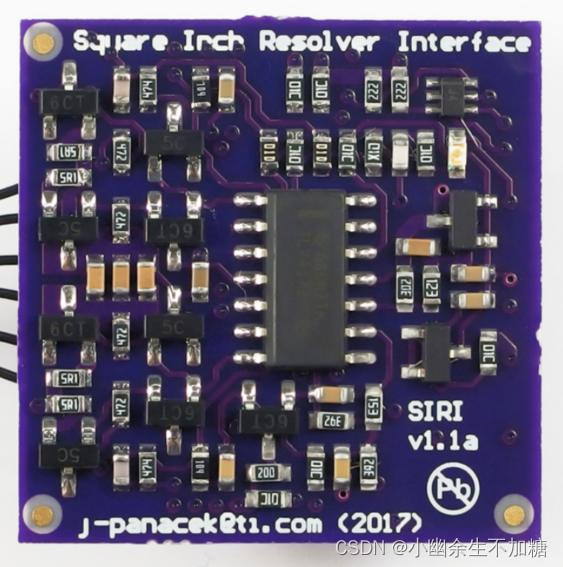
• 在 1 平方英寸的四层 PCB 上进行极简的部署
• 行业标准化组件
• 低成本
• TMS320F28069M C2000™ MCU 的示例固件包含源代码
• 通过欠采样算法来计算角度
• 支持性能升级
• ±0.25° 的角度读取精度,使用创新的散射信号处理方法时精度为 ±0.1°.
应用
• 交流驱动器位置反馈
• HEV/EV - 逆变器和电机控制
• 电动自行车
• 伺服驱动器位置反馈

1.系统描述
高性能电机控制应用程序传统上需要一个速度或位置传感器的控制反馈回路。有各种方法和新算法,可以消除对物理传感器的要求;然而,许多应用程序不能通过无传感器控制来实现所需的性能和可靠性。例如用于混合动力汽车(HEV)和电动汽车(EV)的牵引式逆变器、电动动力转向器、电机驱动器和工业应用中的伺服系统。
解析器是最流行的角度传感器之一,因为它的可靠性(即使在恶劣的环境中)和比率输出,可以抑制共模噪声。
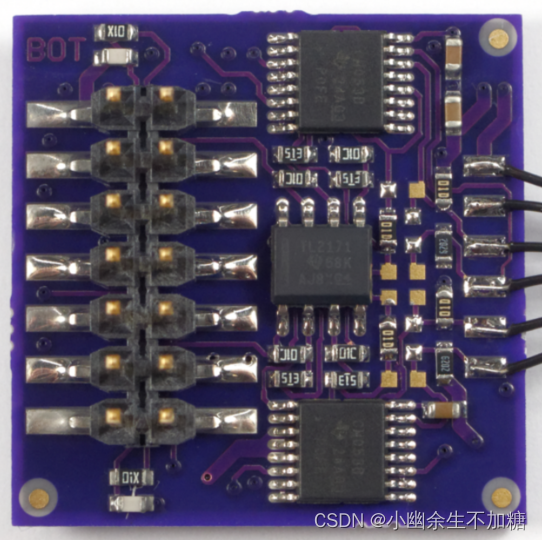
这种离散解析器前端参考设计提供了一个解析器接口的简单实现。该设计使用了一个小型PCB,它实现了主绕组的励磁放大器和反馈绕组的模拟信号前端。PCB通过TMS320F28069M MCU电缆或使用小型PCB适配器连接到C2000的引脚上。所提供的单片机代码示例使用欠采样算法进行读取信号解调,并使用弧切测角函数进行角度计算。
在本设计中使用的组件已被评为汽车应用或具有自动合格的替代方案。该指南还建议更多的定制组件与更高的集成的性能升级。
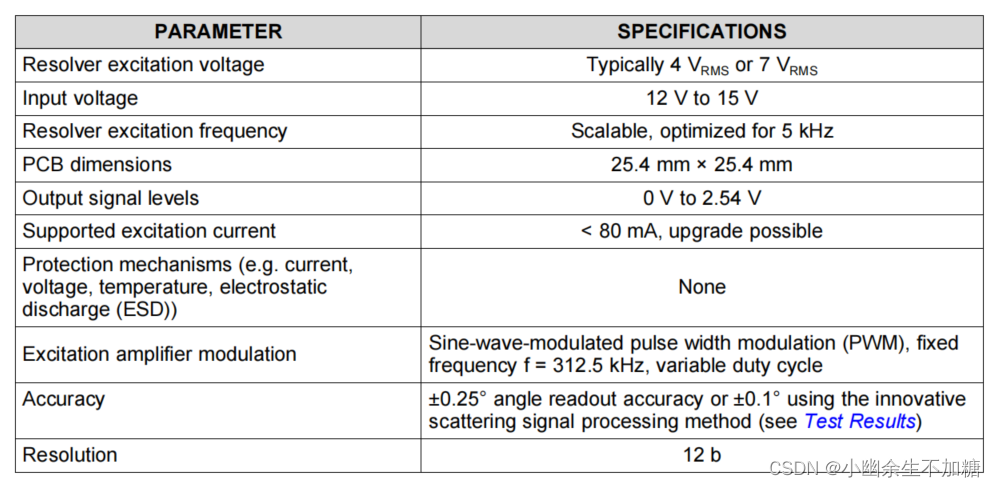
1.1关键参数
2.系统原理
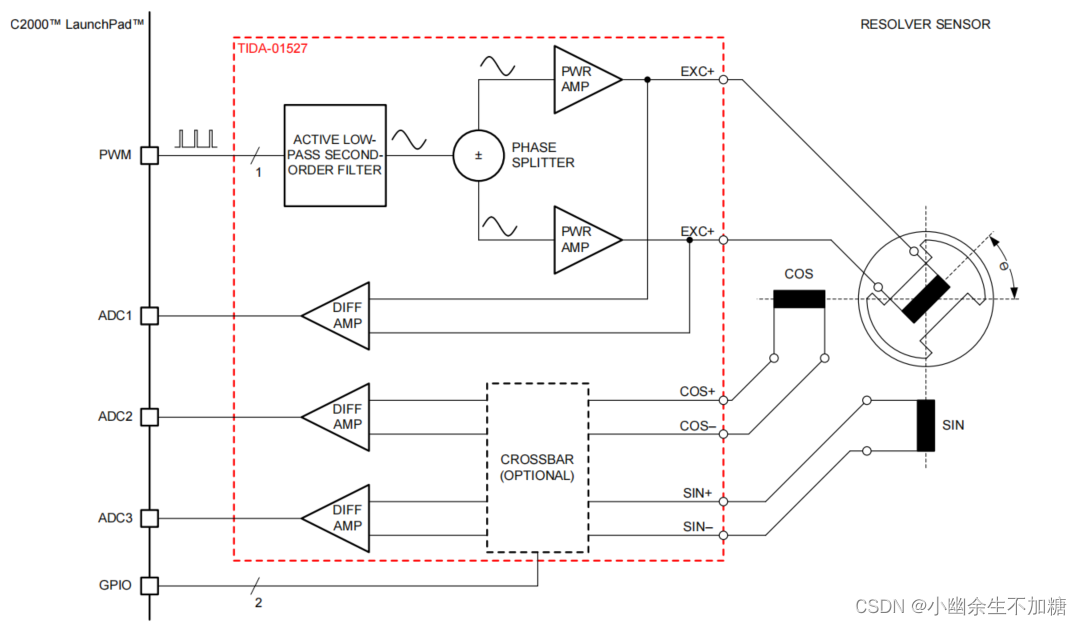
TIDA-01527参考设计由一个主机单片机和解析器传感器组成。主机单片机产生一个具有可变占空比的脉宽调制(PWM)信号。占空比调制与所需的解析器激励频率相匹配。二阶有源低通滤波器只保留激励频率,并将PWM信号转换为谐波信号。模拟分相器电路将谐波信号分割成两个互补的谐波信号。两个功率放大器提高这些谐波信号,以匹配解析器的励磁电压水平。一组差分放大器监控所有分辨器绕组和与主机单片机中的模数转换器(ADC)的接口。该系统使用可选的模拟交叉电路用于先进的模拟处理技术、系统校准和基本诊断。
2.1系统框图
图2显示了该方案参考设计、主机单片机和解析器传感器的方框图。
2.2关键器件
TLV4171
TLVx171系列设备是一个36V、单电源、低噪声运算放大器(运算放大器),能够在2.7 V(± 1.35 V)到36 V(±18 V)的电源上运行。该系列可在多个包,并提供低偏移,漂移,和低静止电流。单、双和四个版本都有相同的规格,以获得最大的设计灵活性。
与大多数仅在一个电源电压下指定的操作放大器不同,TLVx171系列设备被指定从2.7 V到36 V。超过电源轨道的输入信号不会导致相位反转。
TLVx171系列器件性能稳定,电容负载高达200 pF。在正常运行期间,输入可在负轨以下100 mV,在顶轨2V内运行。该装置可以在超过顶轨100 mV的全轨输入下运行,但在2V内性能降低。
TLVx171运培系列的指定范围为-40°C到+125°C。
2.2.2 TLV431x-Q1
TLV431x-Q1装置是一种低压三端子可调电压参考装置,在适用的工业、汽车和商用温度范围内具有规定的热稳定性。输出电压可以在独立模式下设置为1.24 V,或者通过两个外部电阻设置为VREF(1.24 V)和6V之间的任何值。这些设备从比广泛使用的TL431和TL1431分流调节器参考文献更低的电压(1.24 V)下工作。当与光耦合器一起使用时,TLV431器件是3-V到3.3-V开关模式电源的隔离反馈电路中的理想电压参考。这些器件的典型输出阻抗为0.25 Ω。有源输出电路提供了一个非常尖锐的匝数特性,使它们在许多应用中成为低压齐纳二极管的优秀替代品,包括板载调节和可调电源。
2.2.3 C2000™TMS320F28069M MCU
F2806xPiccolo™系列微控制器(mcu)提供了C28x核心和控制律法加速器(CLA)的功率,并在低针计数设备中提供高度集成的控制外围设备。这个系列与以前基于c28x的代码兼容,还提供了高级的模拟集成。
一个内部的电压调压器允许单轨运行。对高分辨率脉冲宽度调制器(HRPWM)模块进行了增强,以允许双边缘控制(频率调制)。已经添加了具有内部10位引用的模拟比较器,并且可以直接路由来控制ePWM输出。ADC可以从0到3.3V固定的全尺度范围转换,并支持比率度量的VREFHI/VREFLO参考。ADC接口已经为实现了低开销和低延迟而进行了优化。
2.3 系统设计原理
2.3.1 PWM
C2000单片机产生一个具有固定频率和可变占空比的PWM信号。PWM周期明显高于解析器激励信号的周期。图3显示了PWM(不是按比例排列的)。
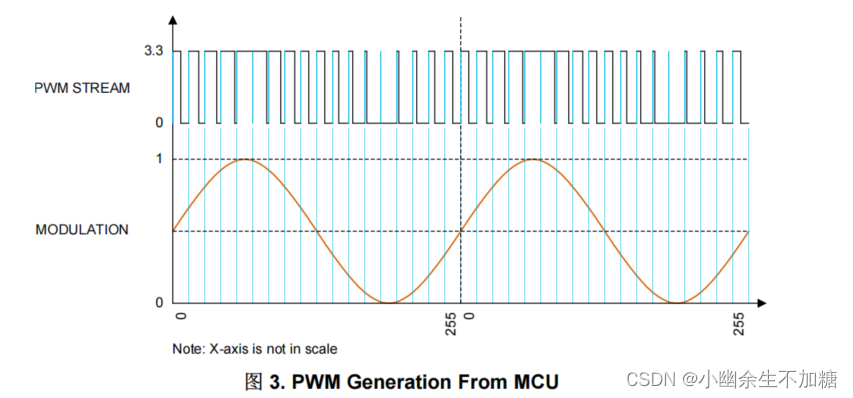
PWM的每一个新周期都触发一个中断服务程序,其中控制器使用窦功能计算一个新的占空比。PWM调制器的周期按照公式1进行设置。

这种方法允许将激励信号转换为具有n位分辨率的离散时间信号。一个内部变量计数器计算从0到2n-1的每个中断,当它达到2n时自动重置。该软件示例使用了IQ数学库。将内部变量计数器转换为IQn数后,结果取介于0…1之间的值,它对应于单位圆上的0…2π角。由于这个原因,内部的变量计数器被称为激发角,或激发角。这个变量非常重要,因为所有的信号处理都涉及到它。
设计者还可以调整PWM占空比调制指数(深度)。通常,调制指数为1.0,它对应于一个从0%到100%的占空比。当设置为0.5时,占空比从25%到75%不等。这种变化降低了激励信号的输出振幅。因此,调制指数变量称为ExcGain,可用于微调输出振幅。请注意,降低调制指数可以降低有效分辨率,增加激励信号的谐波失真。
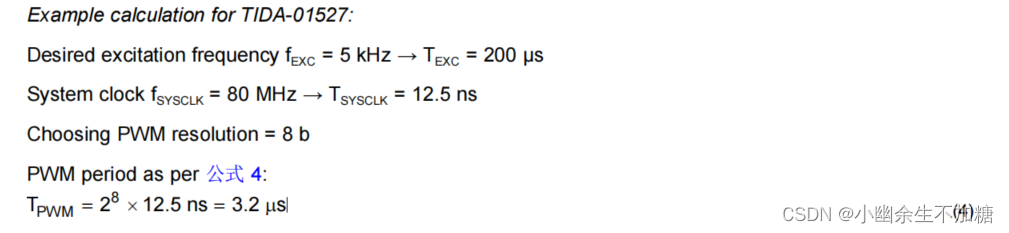
另一个需要理解的重要方面是,所需的位分辨率n和系统时钟周期TSYSCLK根据公式2定义了所生成的PWM信号的周期TPWM。较低的分辨率增加了总谐波失真(THD),而较低的工作频率需要一个高阶低通滤波器。

最后,单片机根据公式3设置占空比:

添加1可以确保占空比总是正的,中心为0.5。
公式1 then turns into公式5

2.3.2 主动低通二阶滤波器和相位分离器
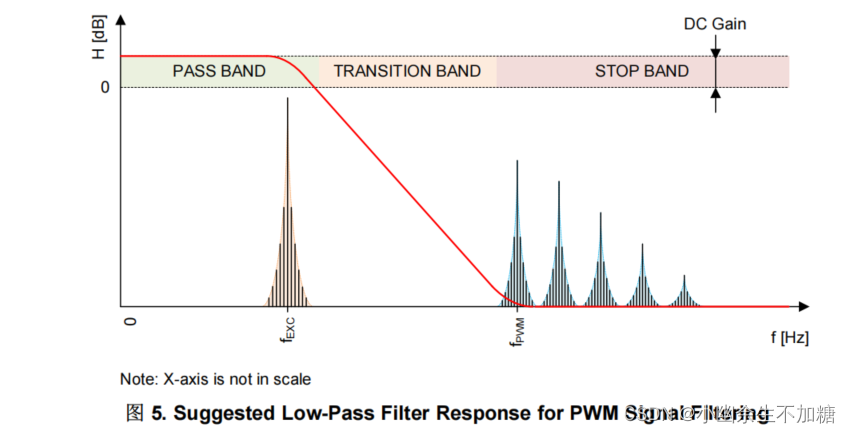
图4显示了节2.3.1中描述的生成的PWM信号的简化幅度谱。
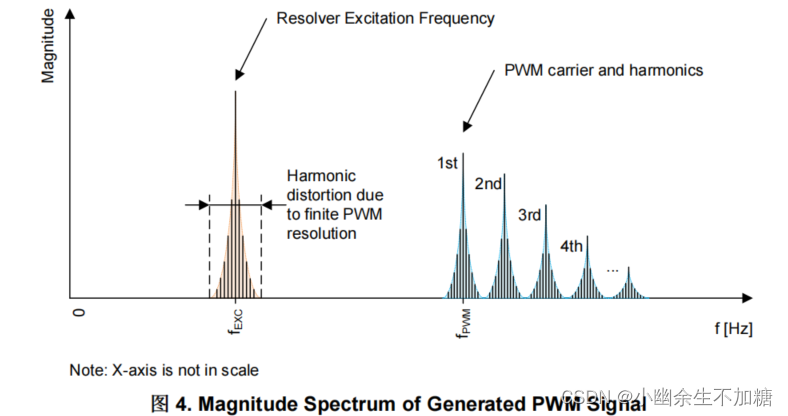
一个正确设置的低通滤波器将PWM载波和谐波抑制到最小值,但通过了解析器激励信号的内容,如图5所示。这个过程将调制后的PWM流转换为正弦波。请注意,增加fEXC和fPWM之间的差异会降低过滤器滚动(滤清器顺序)。设置直流增益和滚动点值得进行实际实验。直流增益补偿了激励频率的衰减,不同的组合提供了不同的结果。匹配-3dB截止到激励频率是设计滤波器的起点。
参考设计使用了一个具有多重反馈拓扑结构的二阶低通主动滤波器,如图6所示。
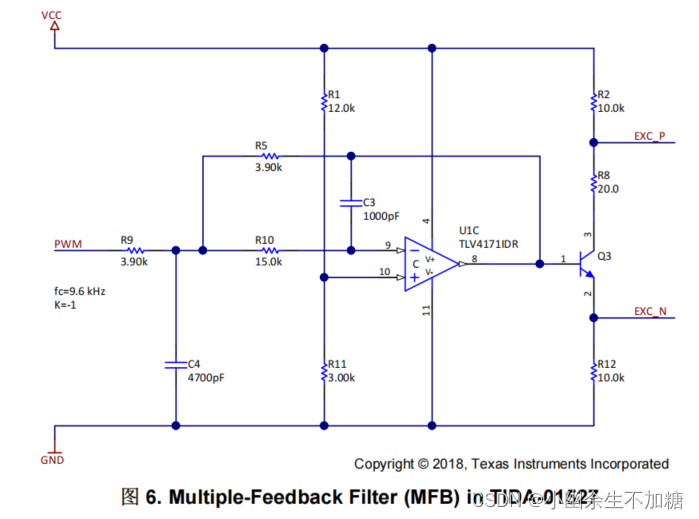
在开发过程中,这种拓扑被证明是比流行的Sallen-Key拓扑更好的解决方案。另一个优点是,设置直流偏移量的电阻分频器(R1,R11)连接到运算放大器的高阻抗非反相输入端。下降键滤波器需要缓冲浮动地面(直流偏移),这增加了电路的复杂性。R5和R9根据公式6设置滤波器的直流增益。
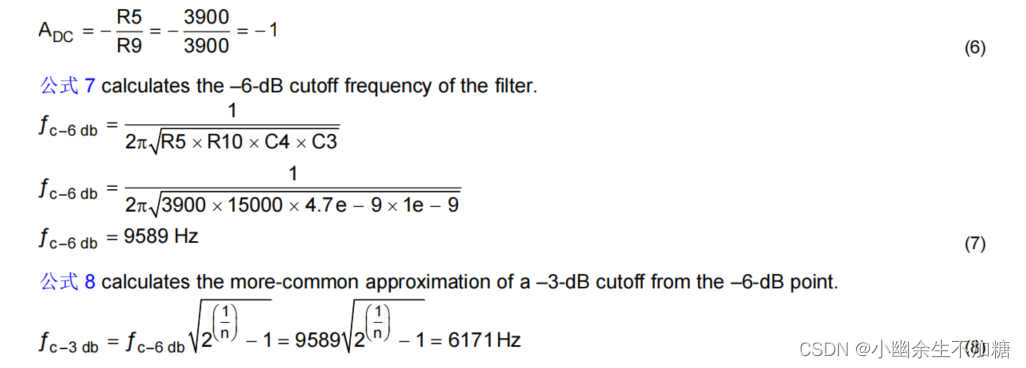
如节2.3.4所描述的,解析器是一个变压器。消除通过一次绕组的任何直流电流对于避免磁路饱和是很重要的。因此,该系统使用了两个输出放大器的差分激励,相移为180°。然后,解析器只按照公式9:的标准注册差动电压VR:

使用晶体管Q3和电阻(R2、R12)的简单模拟相位分离器可以产生匹配良好的互补正弦波。电阻R8补偿了Q3的固有发射源电阻。这种补偿有助于大致匹配集电器和发射器节点之间的输出阻抗。
2.3.3 功率(励磁)放大器
一对励磁放大器直接驱动解析器传感器的一次绕组。两个放大器都是相同的,所以本文档只描述了第一个。该放大器实际上是一个带有带通滤波器响应的单电源音频放大器。图7为电路图。
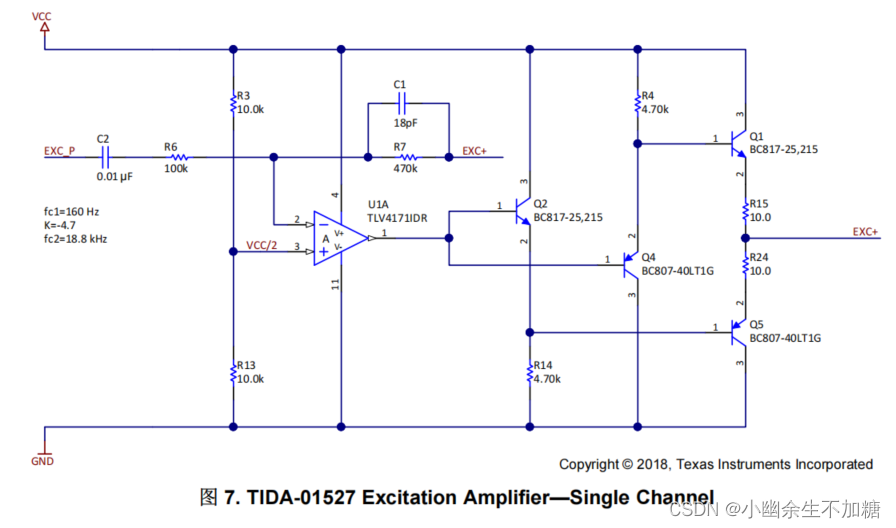
电阻R3和R13创建一个虚拟接地,并将直流偏移量设置到工作电压范围的中间。电阻器R6和R7根据公式12设置通频带增益。请注意,保持这些电阻相当高是很重要的,因为R6也定义了功率级的输入阻抗。

功率级是交流耦合的,因为功率级的虚拟地面(DC偏移)与相位分配器的EXC_P,EXC_N输出不匹配。电容器C2和电阻R6根据公式13设置较低的截止频率。截止频率的设置明显低于激励频率,以防止感兴趣的信号的衰减。

公式14定义了放大器的上截止频率。与节2.3.2中的低通滤波器类似,设计者必须将截止频率设置得尽可能低,以进一步降低PWM谱含量,但足够高,以不衰减通过激发频率。

Ti提供了适合此应用程序的集成功率放大器。一个集成的解决方案解决了许多问题,例如:
输出级偏置
交越失真过
流保护温度
保护温度(失控)稳定性
通过使用离散组件添加这些特性通常会导致非常复杂的电路,通常在高端音频放大器中使用。
推荐: ALM2402、OPA564-Q1
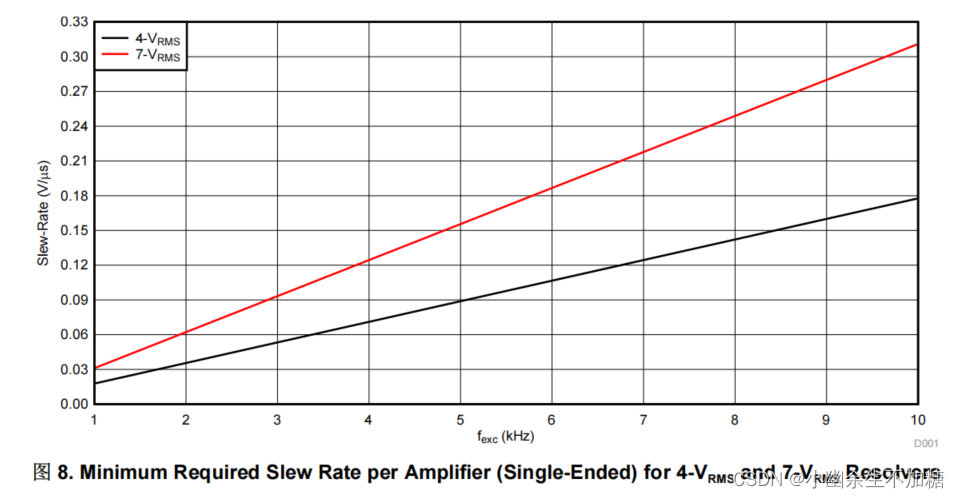
验证励磁放大器的最小旋转率也非常重要。公式15定义了最小旋转率SR。

图8显示了使用激励放大器差分型应用的激励频率、解析器激励电压和放大器旋转速率之间的关系。
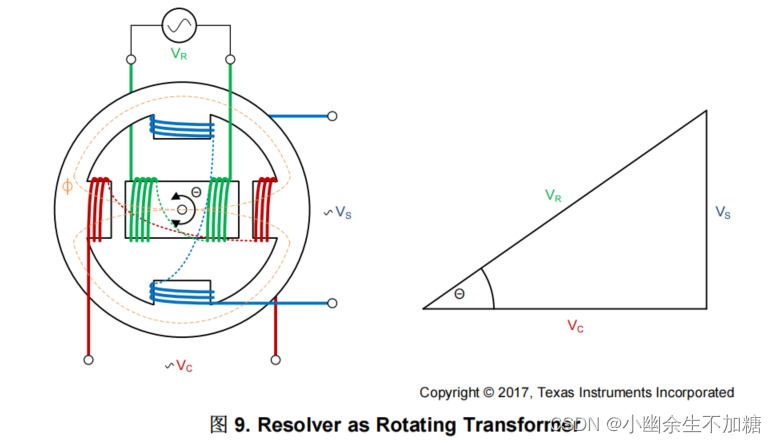
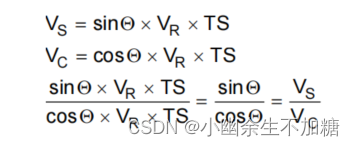
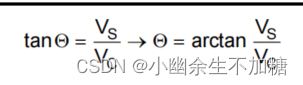
2.3.4 旋变传感器
解析器采用旋转变压器的原理,其中一个主绕组和两个二次绕组彼此成直角放置(见图9)。所产生的正弦波VR激发主绕组并产生磁通Φ,该磁通Φ相对于转子角ϴ通过二次绕组分布。公式16然后根据二次绕组上的电压VS、VC的比值计算转子角度ϴ。
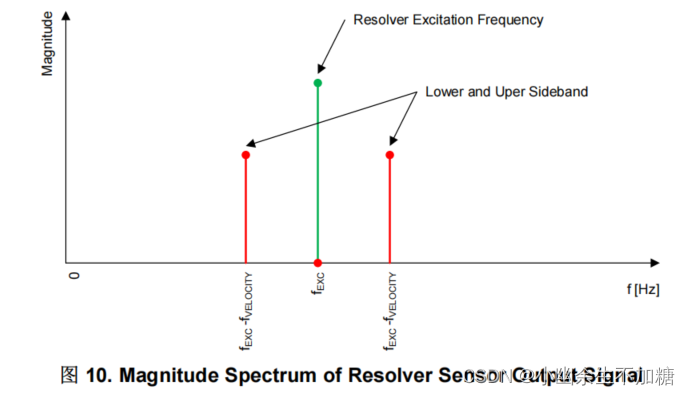
了解分辨器传感器的光谱内容是很重要的。每个解析器绕组产生的信号被幅度调制,调制指数为m=2(过调制)。当解析器稳定且呈固定角度(在图10中以绿色突出显示)时,输出光谱在激励频率fEXC处只有一条光谱线,除非输出信号的振幅为零(每180°)。当解析器以角度频率为VELOCITY(在图10中以红色突出显示)时,过调制(m = 2)的影响完全抑制了载波(激发)频率fEXC。这种效应在设计信号处理算法时是很重要的。
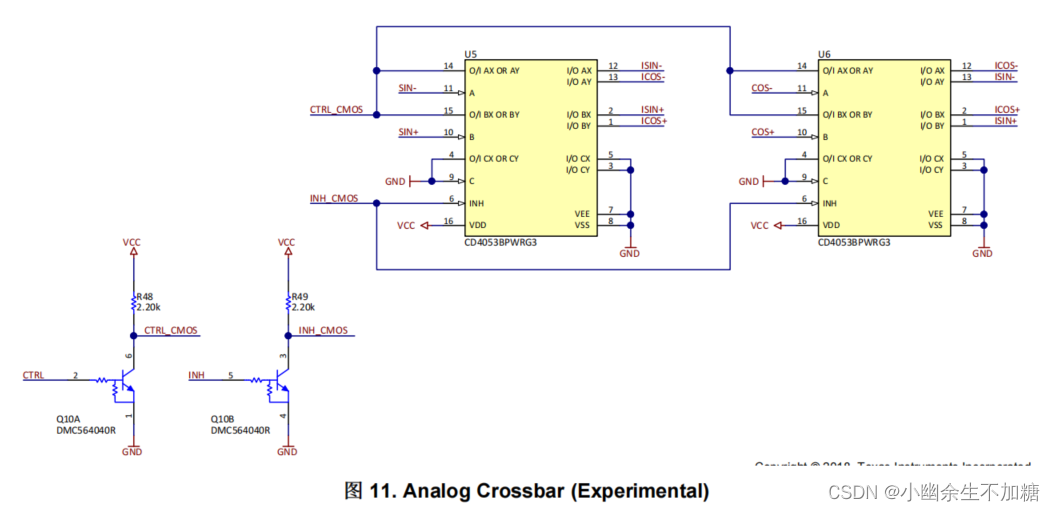
2.3.5 Crossbar—Optional
一对CMOS多路复用器(U5,U6)形成一个模拟交叉杆,如图11所示。该横梁是在信号处理算法中进一步使用的一个实验电路。该电路还允许在每个差分放大器之间交换输入信号或完全断开解析器绕组。该电路,连同单片机中的先进算法,减少了系统错误,并实现了基本的诊断功能。晶体管Q10A、Q10B和电阻R48、R48从单片机转换逻辑电平。
2.3.6模拟前端差分器放大器
该系统使用三个差分放大器来进行反馈。
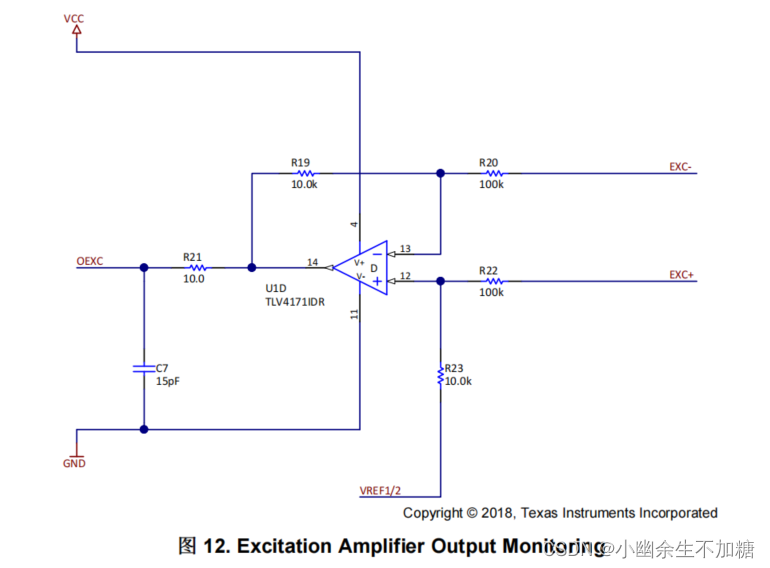
图12显示了第一个放大器,它监测激励输出。监测励磁放大器非常有用,因为单片机中的诊断程序可以补偿部件的公差,并使用ExcGain变量精确调整输出电压。此外,这种监测使系统能够测量有源滤波器和励磁放大器的相位滞后,或检测到一个有故障的励磁放大器。根据公式17设置差分放大器的直流增益。

电阻R21和电容器C7形成ADC的充电斗滤波器。差分放大器使用直流偏移量(VREF1/2)将来自解析器的双向信号与单端ADC输入相匹配。
另外两个差分放大器从解析器传感器监测鼻窦和上鼻窦绕组。因为这两个放大器是相同的。
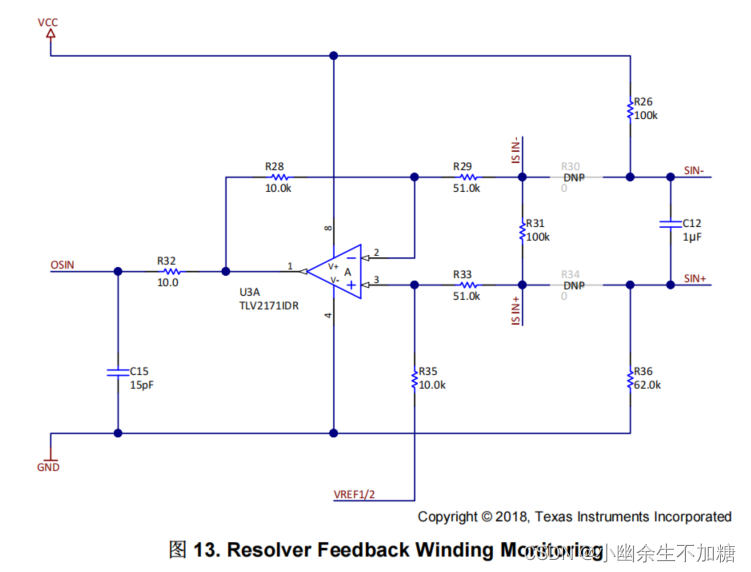
根据公式18设置差分放大器的直流增益。电阻R32和电容器C15形成ADC的充电斗滤波器。差分放大器使用直流偏移量(VREF1/2)将来自解析器的双向信号与单端ADC输入相匹配。

来自解析器二次绕组的信号是浮动的。电阻R26、R31和R36提供了适当的直流偏置。保持运算放大器的输入在指定的共模范围内是很重要的。C12是一个可选的滤波电容器(不组装)。当模拟横梁电路不使用时,必须填充0-Ω电阻器R30、R34。
两个廉价的电压参考U2,U4为ADC创建了一个1.24 V和2.48 V。电阻R27提供偏压,电容器C13、C14提供基本滤波。
Ti建议使用集成的差分放大器,如INA1650-Q1,作为一种潜在的性能升级。一个集成的多通道解决方案提供了更好的信道匹配和精确的增益设置,而不需要昂贵的精度电阻。
2.3.7A/D转换和信号处理
该系统采用欠采样的方法来解调来自分辨器传感器的信号。这种技术是最简单但非常有效的。另一种方法的一个例子是使用数字包络检测器和各种数字滤波器。这样的解决方案也很有效,特别是在有噪声的环境中;然而,每个滤波器都会导致系统中的相位延迟和延迟,这在高性能的反馈控制回路中通常是不可取的。
图14显示了按照公式19以角速度旋转的典型波形。

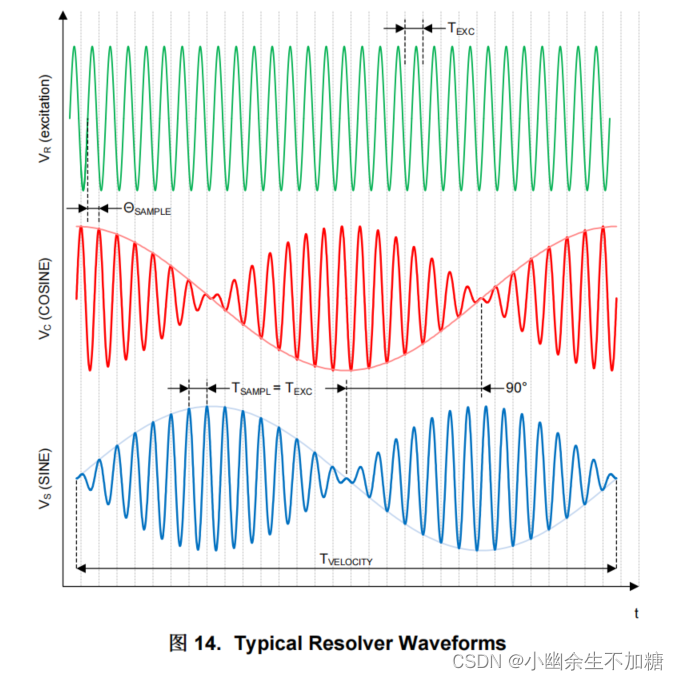
二次绕组的物理位置定义了正弦和余弦信号之间的相移,理想值为90°。
用周期TSAMPL = TEXC采样VS和VC可以解调信号,并只保留角度计算所需的信号包络线,如前面的公式16。ADC转换器总是被设置为在振幅达到最大值时对信号进行采样。这种设置增加了信噪比,并提供了最佳的结果。ADC采样时间来自于节2.3.1中描述的ExcAngle参数。因此,代码使用了名称采样角度。理想情况下,当采样时间为0.25、0.75或两者都有时,采样时间就会出现。然而,存在两种相位滞后源,系统必须加以补偿。第一个相位滞后源是在有源低通滤波器和激励放大器上。
分辨率阻抗随每个模型而变化,定义了相位滞后的第二个来源。一个诊断例程,在启动期间扫描SamplAngle变量,并选择VC或VS最高的时间点,使系统与具有不同阻抗的各种解析器兼容。理想情况下,ADC将两个解析器信号同时进行采样。单片机提供了两个独立的采样和保持电路,可以同时进行采样。因此,VC和VS分别连接到ADCINA0和ADCINB0。
3 散射信号处理方法
一个典型的解析器系统使用一个差分放大器,它与每个输出(VS,VC)的ADC接口,如图15所示。
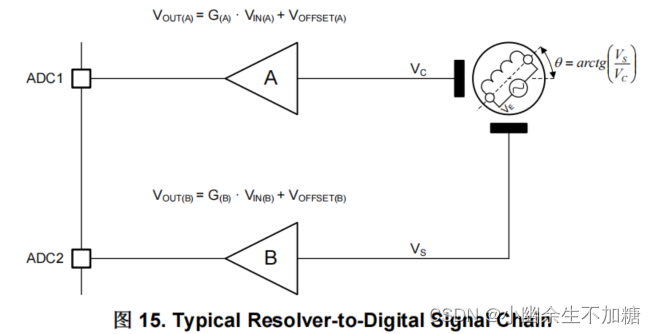
匹配差分放大器的传递函数对系统的精度至关重要。根据公式20,增益或直流偏移量之间的任何差异都会产生角度测量中的非线性误差。

图16中的蓝色轨迹显示了放大器之间1%的增益不平衡如何导致角度误差。红色的轨迹显示了当v偏移量(A) = 0.05×VS(MAX)时,直流偏移量对角度误差的影响。
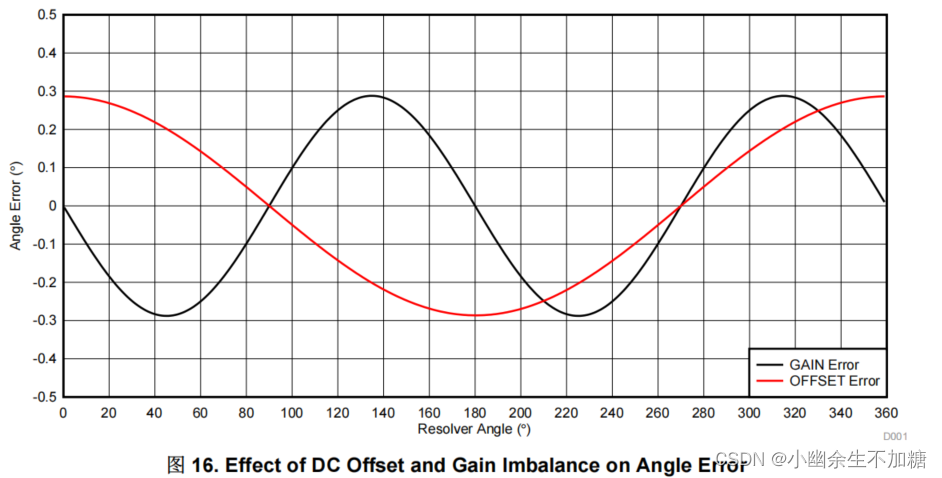
精度较高的系统需要对差值放大器和系统校准的精密组件,这增加了系统和制造成本。这种考虑对离散电路和集成电路都是有效的。
参考设计实现了一种新的散射信号处理方法。该方法使用了节2.3.5中描述的模拟交叉杆和固件中的改进算法。
散射信号处理方法在每个分辨器输出和差分放大器之间增加了一个具有抑制功能的廉价的模拟多路复用器(例如,CD4053)。这个模拟多路复用器允许在系统运行时实时断开解析器的输出或在差异放大器之间交换它们。交换解析器的输出将信号分散到两条信号路径之间,这是这个概念的关键作用。
该系统按以下三个步骤操作,并定期重复:
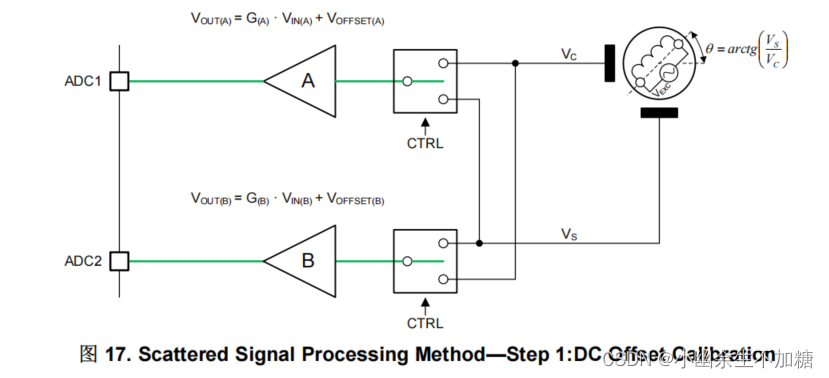
1.使用断开的解析器传感器2进行直流偏移校准。
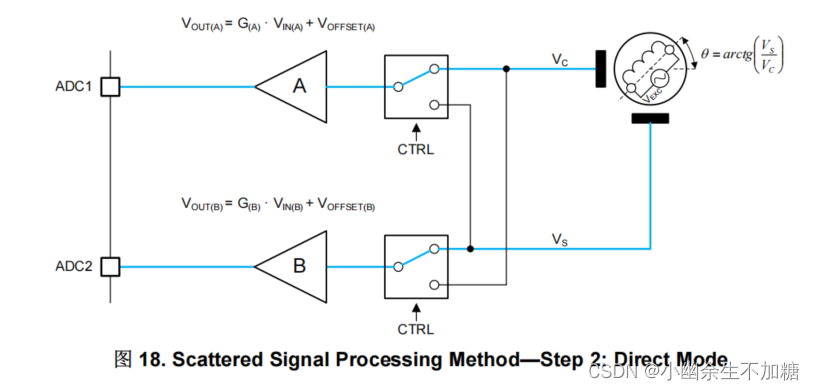
2.用正常连接的解析器输出VS、VC(直接模式)
3.对两个差分放大器的输出进行采样。使用交换解析器输出VS、VC(逆模式)图17对两个差分放大器的输出进行采样,显示了第一步,即直流偏移校准。解析器传感器完全断开,每个差分放大器的输出对应直流偏移偏差(A、B)。
在下一步中,ADC以直接模式对两个差分放大器的输出进行采样(见图18)。
在最后一步中,ADC以逆模式对两个差分放大器的输出进行采样(见图19)
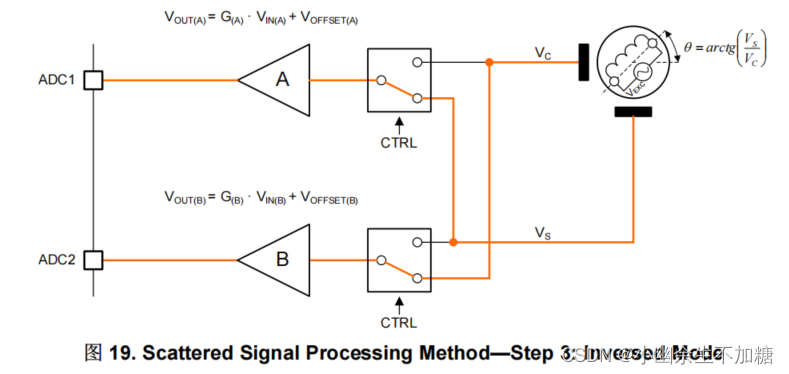
表2列出了ADC在所有三个步骤中读取的值。

角度计算算法利用这三个结果进行增益不平衡和直流偏移消除。首先,该算法根据公式21添加来自步骤2和步骤3的结果。

系统从步骤1中获得两个通道的直流偏移信息并对其进行补偿。这种补偿产生了根据公式22得到的简化公式。

数学操作消除了根据公式23的公式中的增益变量。

此时请注意,增益不平衡和直流偏移不再影响误差计算。还要注意,该方法补偿了ADC传递函数中的任何缺陷(增益或输出)。
散射信号处理技术有额外的积极的副作用。由于冗余的信号路径,该系统允许“跛行模式”操作,并允许进行额外的诊断,其过程如下:
1.硬件工程师计算直流偏移和增益不平衡的最坏情况公差,并参数化系统(例如,1.5%的公差跨度)。
2.然后,该算法定期检查读出数据是否在给定的公差边界内,通常是:
两个通道的直流偏移
在步骤2和步骤3中获得的ADC样本的最大差异
VS和VC振幅
3.如果其中一个诊断结果失败,系统能够检测到有缺陷的通道,并最终在“跛行模式”下工作,性能降低,仅使用一个模拟前端通道。这种措施在强大的系统和安全关键应用(SIL/ASIL)中是重要且有益的。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号