K-D tree 区域查询复杂度证明
查询算法的流程
- 如果查询与当前结点的区域无交集,直接跳出。
- 如果查询将当前结点的区域包含,直接跳出并上传答案。
- 有交集但不包含,继续递归求解。
K-D Tree 如何划分区域
可以借助下文图片理解。
我们不仅可以将 K-D Tree 理解为一个高维二叉搜索树,通过某一维标准值进行元素的划分。
还可以理解为使用一些直线(线段或射线)将整个空间划分为若干个区域,便于缩小搜索范围,以达到剪枝的目的。
2-D 查询复杂度证明
有问题请在评论区指出,谢谢!
可以知道,时间开销最大的地方在于流程中“有交集但不包含”情况的处理。设这样的点的个数为 \(x\),那么查询一次的时间复杂度为 \(O(x)\)
我们先放张图,假定查询是一个竖直线(询问区域在左边):
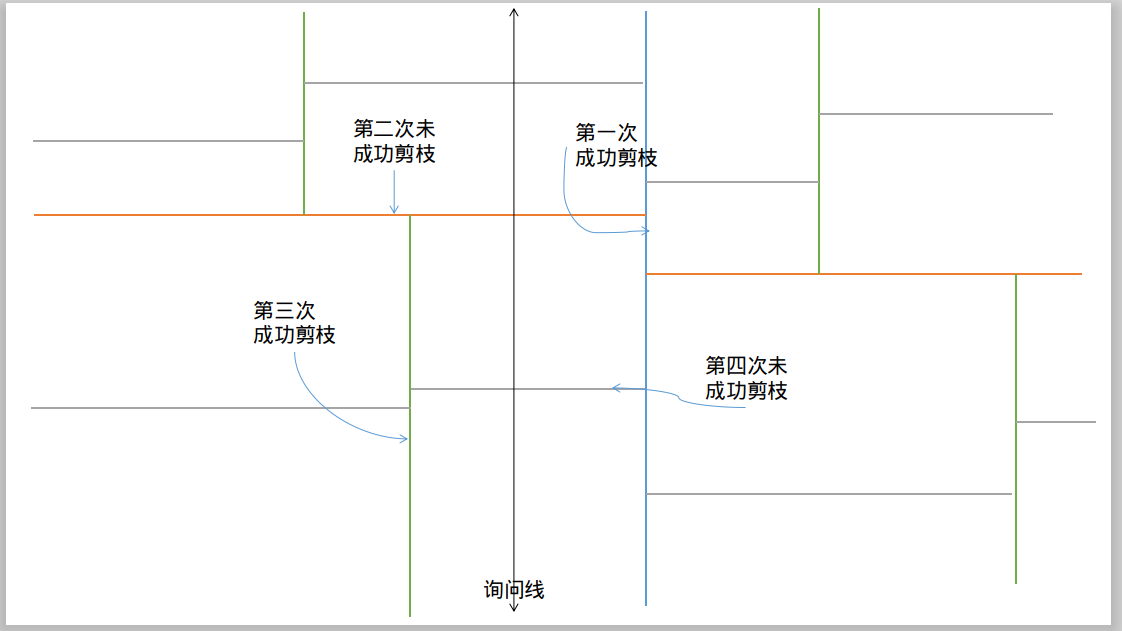
可以清晰地看见 K-D Tree 如何划分区域的:根结点、直接儿子、第三代子孙、第四代……,它们分别交替着划分第一维,第二维。
直接去考虑 \(x\) 的规模大小并不容易,不如尝试着研究它的剪枝情况。
首先,第一次我们的剪枝是有效的,右侧一半会被剪掉,那么往下结点数不翻倍。
首先,第二次我们的剪枝是无效的,那么往下结点数翻倍。
第三次有效,第四次无效……
这样一来,只有奇数层会有剪枝效果,偶数曾则没有。一颗 \(h\) 层的 K-D Tree,有 \(\frac{h}{2}\) 次翻倍,因此 \(x \approx \sum_{i=0}^{\frac{h}{2}} 2^i \approx 2^{\frac{h}{2}}\)。
由于带有替罪羊重构的 K-D Tree 是平衡的,那么 \(h \approx \log_2 n\)。
于是 \(x\approx 2^{\frac{h}{2}} = (2^{\log_2 n})^{0.5} = n^{0.5}\)
所以一次矩形查询的复杂度为 \(O(\sqrt{n})\)。
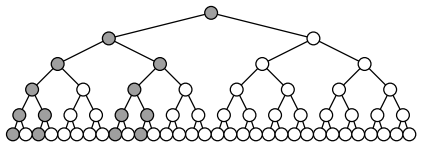
最后放张图,其中灰色结点是搜索范围(原图出处):
K-D 查询复杂度证明
我们不难将 2-D 的证明推广之 \(k\) 维。
那么只有在 \(k\) 维中的一维才会有剪枝效果,其他维度结点都会 \(\times 2\)。
那么 \(\Large x \approx \sum\limits_{i=1}^{\frac{h(k-1)}{k}} 2^i \approx 2^{\frac{h(k-1)}{k}}\)。其中 \(h \approx \log_2 n\) 为树高。
\(\Large x \approx 2^{\frac{h(k-1)}{k}} = (2^{\log_2 n})^\frac{k-1}{k} = n^{\frac{k-1}{k}}\)。
由于还有一次 \(k\) 个维度的比较,那么一次就是 \(\Large O(k\cdot n^{\frac{k-1}{k}})\) 的时间复杂度。
后记
证明过程可能不是很严谨,有问题请指出。
reference:l1ll5 - K-D tree在信息学竞赛中的我也不知道有什么的应用
- 原文地址:https://www.cnblogs.com/-Wallace-/p/13429463.html
- 本文作者:@-Wallace-
- 转载请附上出处。
本文来自博客园,作者:-Wallace-,转载请注明原文链接:https://www.cnblogs.com/-Wallace-/p/kdt-time.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号