
[体感游戏] 1、MPU6050数据采集传输与可视化
最近在研究体感游戏,到目前为止实现了基于51单片机的MPU6050数据采集、利用蓝牙模块将数据传输到上位机,并利用C#自制串口数据高速采集软件,并且将数据通过自制的折线图绘制模块可视化地展示出来等功能。本文将主要对实现这意见单系统中遇到的问题做一个小结——其中包括:
关键词:MPU6050 蓝牙 C#串口 多线程 高速串口 折线图绘制
因为是入门级,就先最简单的介绍如何利用51从MPU6050中读取数据吧(对于想知道卡尔曼滤波、俯角仰角、距离测量、摔倒检测、记步等算法的可能要在接下来介绍)。既然要和MPU6050通信,那么必不可少的是阅读芯片手册,如果您觉得亲自去看又长又多而且都是英文的手册很费时,不仿看看我找的简要版:
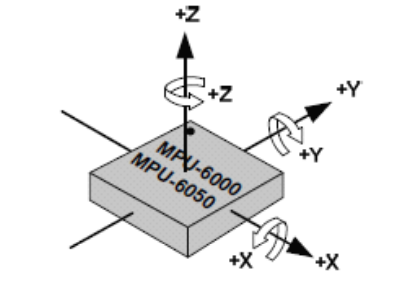
MPU-60X0是全球首例9轴运动处理器。它集成了3轴MEMS陀螺仪,3轴MEMS加速计,以及1个可扩展的数字运动处理器DMP(Digital Motion Processor),可用I2C接口连接一个第三方的数字传感器,比如磁力计。扩展之后就可以通过其I2C或SPI接口输出一个9轴的信号。MPU-60X0也可以通过其I2C接口连接非惯性的数字传感器,比如压力传感器。
MPU-60X0对陀螺仪和加速计分别用了三个16位的ADC,将其测量的模拟量转化为可输出的数字量。为了精确跟踪快速和慢速运动,传感器的测量范围是可控的,陀螺仪可测范围为±250,±500,±1000,±2000°/秒(dps),加速计可测范围为±2,±4,±8,±16g(重力加速度)。
注:下图是采用串口助手将MPU6050采集的数据显示在上位机上,其中前三列输出为三维的加速度(这里的加速度包括地球本身的重力加速度),后三列为三维的角速度。
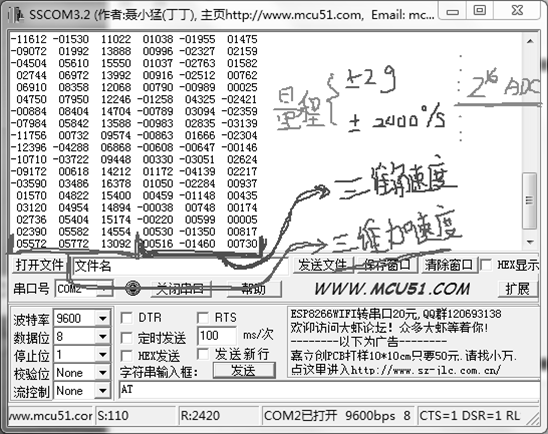
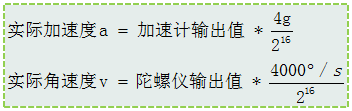
但是这里的输出值并不是真正的加速度和角速度的值,上面说过,MPU是一个16位AD量程可程控的设备,这里设置的加速度传感器的测量量程为正负2g(这里的g为重力加速度),陀螺仪的量程为正负2000°/s。所以要用下面的公式进行转化:
好了,有了上面的基础知识之后咱们就能尝试用51的I2C总线从MPU6050读取实时的3轴加速度和3轴角速度了。由于51本身不带有I2C总线通信协议,所以我们要自己实现一个I2C通信协议,下面是我从网上找的并稍加修改的一个I2C总线通信的代码:

1 #include <REG52.H> 2 #include <INTRINS.H> 3 4 typedef unsigned char uchar; 5 typedef unsigned short ushort; 6 typedef unsigned int uint; 7 8 //----------------------------------------- 9 // 定义MPU6050内部地址 10 //----------------------------------------- 11 #define SMPLRT_DIV 0x19 //陀螺仪采样率,典型值:0x07(125Hz) 12 #define CONFIG 0x1A //低通滤波频率,典型值:0x06(5Hz) 13 #define GYRO_CONFIG 0x1B //陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s) 14 #define ACCEL_CONFIG 0x1C //加速计自检、测量范围及高通滤波频率,典型值:0x01(不自检,2G,5Hz) 15 #define ACCEL_XOUT_H 0x3B 16 #define ACCEL_XOUT_L 0x3C 17 #define ACCEL_YOUT_H 0x3D 18 #define ACCEL_YOUT_L 0x3E 19 #define ACCEL_ZOUT_H 0x3F 20 #define ACCEL_ZOUT_L 0x40 21 #define TEMP_OUT_H 0x41 22 #define TEMP_OUT_L 0x42 23 #define GYRO_XOUT_H 0x43 24 #define GYRO_XOUT_L 0x44 25 #define GYRO_YOUT_H 0x45 26 #define GYRO_YOUT_L 0x46 27 #define GYRO_ZOUT_H 0x47 28 #define GYRO_ZOUT_L 0x48 29 #define PWR_MGMT_1 0x6B //电源管理,典型值:0x00(正常启用) 30 #define WHO_AM_I 0x75 //IIC地址寄存器(默认数值0x68,只读) 31 #define SlaveAddress 0xD0 //IIC写入时的地址字节数据,+1为读取 32 33 //----------------------------------------- 34 // I2C总线通信函数 35 //----------------------------------------- 36 void I2C_Start(); //I2C起始信号 37 void I2C_Stop(); //I2C停止信号 38 void I2C_SendACK(bit ack); //I2C发送应答信号[入口参数:ack (0:ACK 1:NAK)] 39 bit I2C_RecvACK(); //I2C接收应答信号 40 void I2C_SendByte(uchar dat); //向I2C总线发送一个字节数据 41 uchar I2C_RecvByte(); //从I2C总线接收一个字节数据 42 void Single_WriteI2C(uchar REG_Address,uchar REG_data);//向I2C设备写入一个字节数据 43 uchar Single_ReadI2C(uchar REG_Address); //从I2C设备读取一个字节数据 44 45 //----------------------------------------- 46 // 通过I2C和MPU6050通信的函数 47 //----------------------------------------- 48 void InitMPU6050(); //初始化MPU6050 49 int GetData(uchar REG_Address); //合成数据
如果你没搞过硬件又从未听说过I2C,那么想想socket的握手再看看上面36~43行的有关ACK、Send、Write的函数大概能明白I2C的功能。当我们实现I2C的通信函数之后就可以与带有I2C通信接口的芯片进行通信,那么怎样通信呢?其实很简单——你可以把每个芯片比做为一个巨大的储物柜,储物柜里每个抽屉里存着相应的东西,你想让佣人帮你去拿个东西,只要告诉佣人对应的抽屉号就行了。这里I2C总线相当于这个佣人,每个抽屉相当于芯片中的寄存器,抽屉号相当于寄存器地址。当你想设置芯片的某些属性时是向对应的寄存器内写数据,当想从芯片内获取相关数据时,就要通过I2C向对应的地址写数据然后接收芯片返回的数据。这里的8~31行为MPU-6050芯片内几个常用的寄存器地址,前四个常用来作为设置芯片工作属性,15~28共14个寄存器地址用来获取传感器的3轴加速度、3轴角速度和温度的数据(这里每一种信息都包括H和L两位,是由于8位表示不完该数据,于是分高低两部分)

这样我们便不难理解InitMPU6050()和GetData(uchar REG_Address)函数:初始化函数是向相应的地址写初始化配置数据(关于0x00\0x07等意思请参看MPU6050寄存器版说明书),而GetData则是传入想获得数据项的低地址,然后连续读取当前地址数据和下一地址数据合成为想要的项目数据(上面讲了数据分高低部分)。
1 //----------------------------------------- 2 //初始化MPU6050 3 //----------------------------------------- 4 void InitMPU6050() 5 { 6 Single_WriteI2C(PWR_MGMT_1, 0x00); //解除休眠状态 7 Single_WriteI2C(SMPLRT_DIV, 0x07); 8 Single_WriteI2C(CONFIG, 0x06); 9 Single_WriteI2C(GYRO_CONFIG, 0x18); 10 Single_WriteI2C(ACCEL_CONFIG, 0x01); 11 } 12 //----------------------------------------- 13 //合成数据 14 //----------------------------------------- 15 int GetData(uchar REG_Address) 16 { 17 uchar H,L; 18 H=Single_ReadI2C(REG_Address); 19 L=Single_ReadI2C(REG_Address+1); 20 return (H<<8)+L; //合成数据 21 }
上面我们已经知道单片机如何利用I2C设置MPU6050的工作属性,以及从MPU6050获得3轴加速度和3轴角速度的数据。那么接下来将介绍单片机是如何将数据通过蓝牙发送给上位机的。如下图左半部分,下位机部分包括一个MPU6050、一个单片机、一个电源模块,以及一个蓝牙模块。对于蓝牙模块我不想做过多的讲解(我记得我已经写了不下于3次关于手机、PC等和下位机通信的教程了:(如果是想用安卓手机和蓝牙模块通信来实现遥控功能的话,可以参考:http://www.cnblogs.com/zjutlitao/p/4231635.html;想用笔记本和蓝牙模块通信来实现遥控功能的话可以参考:http://www.cnblogs.com/zjutlitao/p/3886826.html)

其实,利用串口蓝牙模块单片机要做的工作和对串口进行的操作一样,对串口写数据则送至蓝牙模块将数据发出,当外部有数据传送过来时,单片机可以用相应的中断捕获该事件,然后接收消息。因此主函数中初始化串口和MPU6050之后就进入循环数据发送状态,在循环中GetData是上面介绍的获得3轴加速度、3轴角速度或温度的值的函数,SendData则是将int类型的值转换为字符串然后一位一位的发送出去,而最开始和最后分别发送一个#和$作为该帧的开始和结束标志位,具体格式如下:
| # | 1 | 2 | 3 | 5 | 4 | - | 2 | 1 | 3 | 3 | 2 | - | 2 | 1 | 1 | 2 | 5 | $ |
注:符号位要么为'-',要么为空。
1 //----------------------------------------- 2 //主程序 3 //----------------------------------------- 4 void main() 5 { 6 delay(500); //上电延时 7 init_uart(); 8 InitMPU6050(); //初始化MPU6050 9 delay(150); 10 while(1) 11 { 12 SeriPushSend('#');// 13 SendData(GetData(0x3B)); //X轴加速度 14 SendData(GetData(0x3D)); //Y轴加速度 15 SendData(GetData(0x3F)); //Z轴加速度 16 SeriPushSend('$'); //结束 17 delay(20); 18 } 19 }
上面讲到下位机通过串口蓝牙将数据发送给上位机,那么上位机如何接收蓝牙信号呢?其实以我的笔记本为例,因为笔记本内置蓝牙模块,所以无需在上位机上独立安装一个USB-蓝牙模块。而上位机操作蓝牙模块和操作串口几乎一模一样。如下面的C#程序,当点击连接按钮时实例化SerialPort,设置端口号、读超时、然后实例化一个串口数据接收事件句柄(这里PortDataReceived作为数据接收的回调函数)。
1 //Create a serial port for Connection 2 SerialPort Connection = new SerialPort(); 3 private void btn_link_Click(object sender, EventArgs e) 4 { 5 if (!Connection.IsOpen) 6 { 7 //Start 8 //Status = "正在连接..."; 9 Connection = new SerialPort(); 10 btn_link.Enabled = false; 11 Connection.PortName = PortList.SelectedItem.ToString(); 12 Connection.Open(); 13 Connection.ReadTimeout = 10000; 14 Connection.DataReceived += new SerialDataReceivedEventHandler(PortDataReceived); 15 //Status = "连接成功"; 16 timer1.Start(); 17 } 18 }
在PortDataReceived中,只要简单调用Connection.Read(data, 0, length);就能从串口缓冲区读取数据到data中。
1 private void PortDataReceived(object o, SerialDataReceivedEventArgs e) 2 { 3 byte[] data = new byte[length]; 4 int num=Connection.Read(data, 0, length); 5 datepool.push_back(data,num);//实际接收的不一定是length,之前一直错 6 Connection.DiscardInBuffer(); 7 Connection.DiscardOutBuffer(); 8 }
注:本来是每次读取1byte放入数据池,结果出现程序运行速度越来越慢,本以为是上面的数据池设计的有问题,结果把数据池里的线程注释掉改为ask函数来每次需要数据时才获得,但是问题并不在于此;于是想到可能是绘制折线图的函数有问题,但是重查了一遍发现问题不在于此;于是仔细测量每个过程耗时,发现每个模块耗时正常,最后发现是由于串口缓冲区数据积累造成程序变慢,(因为下位机每20ms发送一次20byte的数据给上位机,上位机若一次不接收完所有数据,将会造成每次都有剩余而逐渐变慢),于是直接改成每次接收20byte,问题得到解决。
由于下位机10ms发送一次20byte的数据,上位机一方面要做好接收工作,保证数据不拥挤在串口接收缓冲区;另一方面也要实时获取当前从串口读到的最新数据。如果采用传统多线程+锁的机制是可以的,但是当多线程中加入锁势必会影响程序执行效率,通过综合分析该问题最终抽象出一个特殊的数据模型——自动更新的环形栈:
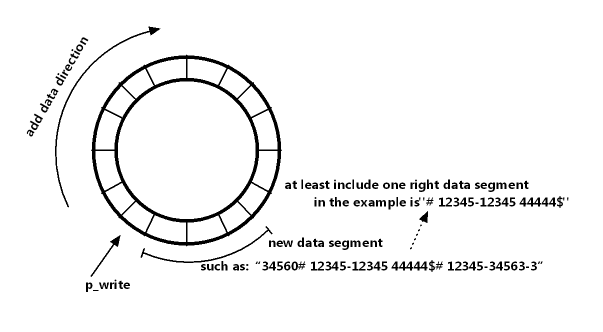
这样,当采用多线程时,用一个类似于栈的环状栈结构体(实时从串口读数据放入数据池,数据池用p_write标记最新数据存储位置,当外部程序想得到最新数据时,调用ask程序,ask程序从当前p_write向前取40个数据(因为有效数据长度为20,一次取40保证至少有一个有效数据),然后从这40个数据中找出有效信息,赋值给X,Y,Z;然后外部程序可以直接用对象访问X,Y,Z),通过适当调节环的容量达到自我覆盖的效果,同时根据p_write指针可以实时取得最新数据。
1 /// <summary> 2 /// 询问当前值 3 /// </summary> 4 /// <returns>如果解析到则返回真</returns> 5 public bool ask() 6 { 7 i = 0;//立刻将相应的40个字符复制出来 8 p_read_from = p_write - 40; 9 while (i < 40) 10 { 11 str[i] = pool[(p_read_from + pool_size) % pool_size]; 12 i++; 13 p_read_from++; 14 } 15 i = 39; 16 while (i > 18 && str[i] != '$') i--; 17 if (i == 18) return false; 18 i--; 19 data_Z = 0; 20 for (int j = 4; j > -1; j--) 21 { 22 data_Z *= 10; 23 data_Z += (str[i - j] - '0'); 24 } 25 if (str[i - 5] == '-') data_Z = -data_Z; 26 i -= 6; 27 28 data_Y = 0; 29 for (int j = 4; j > -1; j--) 30 { 31 data_Y *= 10; 32 data_Y += (str[i - j] - '0'); 33 } 34 if (str[i - 5] == '-') data_Y = -data_Y; 35 i -= 6; 36 37 data_X = 0; 38 for (int j = 4; j > -1; j--) 39 { 40 data_X *= 10; 41 data_X += (str[i - j] - '0'); 42 } 43 if (str[i - 5] == '-') data_X = -data_X; 44 45 X = data_X; 46 Y = data_Y; 47 Z = data_Z; 48 return true; 49 } 50 51 /// <summary> 52 /// 将数据输入数据池 53 /// </summary> 54 /// <param name="date">数据</param> 55 /// <param name="length">长度</param> 56 internal void push_back(byte[] date, int length) 57 { 58 for (int i = 0; i < length; i++) 59 { 60 pool[p_write++] = date[i]; 61 if (p_write == pool_size) p_write = 0; 62 } 63 }
通过上面几步我们已经可以将下位机的陀螺仪3轴的加速度收集过来了,但是如果先将数据收集好,然后再用matlab绘制,我们很难知道哪个动作对应哪个数据,不利于我们观察效果(虽然matlab上自带串口接口,但是LZ就是任性!有一张好看的脸,还是想着靠实力赢得地位,哈哈哈~)。
如本节小标题括号内所示,在C#里写一个绘制折线图的程序应该属于我们的基本功(我可不是调用相应的绘图接口哦!),其大致思想就是用一个List存储num个数据,当list中的数据少于num个时则不断添加,当list内的数据大于num个时,则从尾部进来一个的同时从头部删除一个(这样才能实现perfect的效果)。
注:其实中间还出现了一个逻辑错误性小插曲:原初写好之后,本以为能够实现高效数据采集显示,但是仔细观察发现还是有很大延时,但是旁边的数据显示却非常实时。这是为什么呢?查找了一会最终发现问题出在折线图绘制上——本来采用固定的模式(一张图能存放多少数据点就用vector<int>P/Q/R在初始化的时候存放这么多点,然后每次有一个新的数据过来时就会将新数据加到vector后面,同时删除最前面的一个数据,这样做是为了方便初始vector里没有数据绘制折线图错误的问题),可是问题就出在这!咋一看这种思路很好,初始化vector中放num个点,每次新的来到将最前面一个数据冲掉,这样这个vector始终保持着num个点,且最新的在最后面,整个折线图能反应实时情况。但是由于我为了“安全”起见,在vector初始化时多Add几个数据,这样导致vector中的数据量N>折线图一次能呈现的数据量num,所以最新的数据总会在之后出现!当时没有想到是这个原因,就直接改了下DateLineChar函数,实现根据vector大小自动绘制的算法(这样就不用预先在vector中装入一定量的值了)
6、预告与小结(预知后事如何,请听下回分解)
上面我只是简单收集了MPU6050的3轴加速度数值,当MPU6050位置固定好之后,我们就能根据数据推测其具体的姿态。例如:

绿色的z轴方向的加速度先高后低,红色y轴方向加速度先低后高,蓝色x轴方向加速度和y轴类似,但是比y轴幅度变化小,而后半周期数值正负正好相反。那么MPU6050运动过程大致为:在y轴方向上做往返运动,同时在x轴和z轴方向有稍微的偏转。(水平静止放置时z轴为重力加速度,x,y为0)
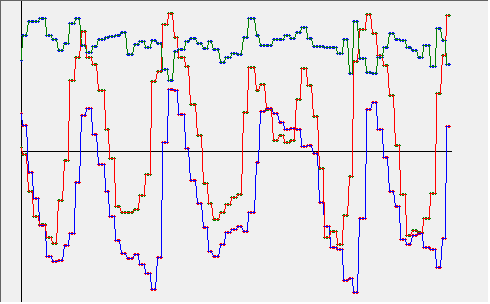
绿色的z轴变化不大,红色的y和蓝色的x同步类正弦变化。呵呵,这个运动状态分析起来就不太容易了~不过没关系,接下来我们要进一步获取并计算MPU6050的倾角,甚至是利用卡尔曼滤波计算MPU6050的运动距离,最终达到perfect的运动跟踪效果~
链接
51MPU6050采集代码:http://pan.baidu.com/s/1c0yE7Ws
4月2号总工程:http://pan.baidu.com/s/1hqzSt7Y (我用)
4月7号总工程:http://pan.baidu.com/s/1pJwq6qZ (我用)
github:https://github.com/beautifulzzzz/C4plus/tree/master/体感游戏
预习用1:[芯片][MPU6050] MPU60X0的DMP相关链接
预习用2:[stm32] MPU6050 HMC5883 Kalman 融合算法移植

【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步