
[C#] 编程控制笔记本蓝牙与外部蓝牙设备通信
一、蓝牙模块XLBT232‐D01介绍(外部设备蓝牙)

1.1、蓝牙模块简介
XLBT232-D0101蓝牙模块采用CSR BlueCore 芯片,配置6-8Mbit 的软件存储空间,
支持AT 指令,用户可根据需要更改SPP 角色(主、从模式)以及串口波特率、
设备名称、配对密码等参数,使用灵活。
1.2、模块功能介绍
1.2.1、特性
- 蓝牙协议:Bluetooth Specification V2.1+EDR、V2.0+EDR、V2.1、V2.0 V1.2
- 工作频率:2.4GHz ISM band
- 调制方式:GFSK(Gaussian Frequency Shift Keying)
- 发射 率:≤4dBm, Class 2
- 灵 敏 度:≤-84dBm at 0.1% BER
- 传输速率:Asynchronous: 2.1Mbps(Max) / 160 kbpsSynchronous: 1Mbps/1Mbps
- 安全特性:Authentication and encryption
- 支持服务:Bluetooth SPP(主模式& 从模式)
- 供电电源:+3.3VDC 50mA
- 工作温度:-5 ~ +65 Centigrade
- 外观尺寸:26.9mm x 13mm x 2.2 mm
1.2.2、模块接线原理图
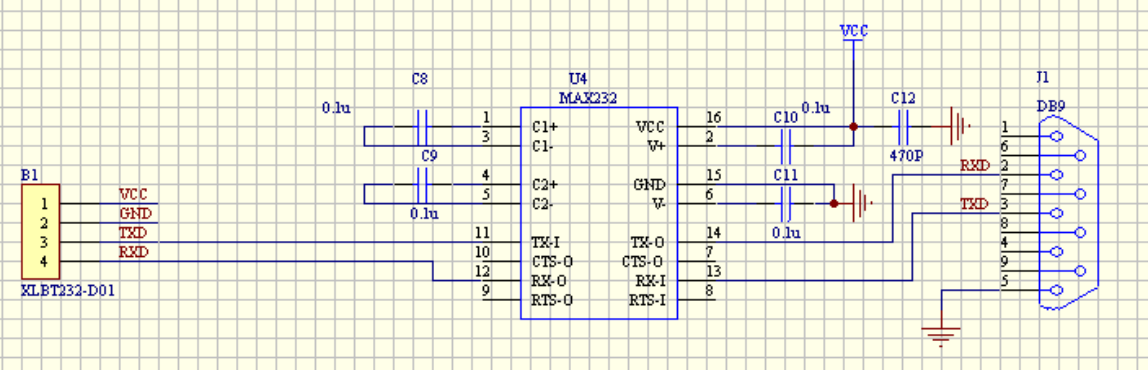
PS:当然也能用USB转TTL模块进行连接在电脑上调试,毕竟大多数笔记本已经没有串口啦!
1.3、使用说明
 [图:蓝牙模块]
[图:蓝牙模块]
>_<" KEY为输入管脚,短按控制,或者输入约100ms 的高电平单次脉冲,可以
实现以下功能:
- 模块设置为SPP 主机模式时:
未连接状态时:清除配对信息(若存在配对设备信息)
已连接状态时:主动发起断开连接,延时150ms 后重启,重新搜索
连接从设备; 在断开连接时:重新搜索连接从设备。
- 模块设置为SPP 从机时:
在已连接状态时:主动发起断开连接,延时150ms 后重启,重新进入被搜
索状态,等待主机配对和连接
在断开连接时:延时150ms 后重启,重新进入被搜索状态,等待主机配对
和连接。
>_<" 显示模块当前工作状态:
- 待机状态慢闪——重复2s 脉冲;
- 连接状态长亮——高电平。
1.4、AT指令集
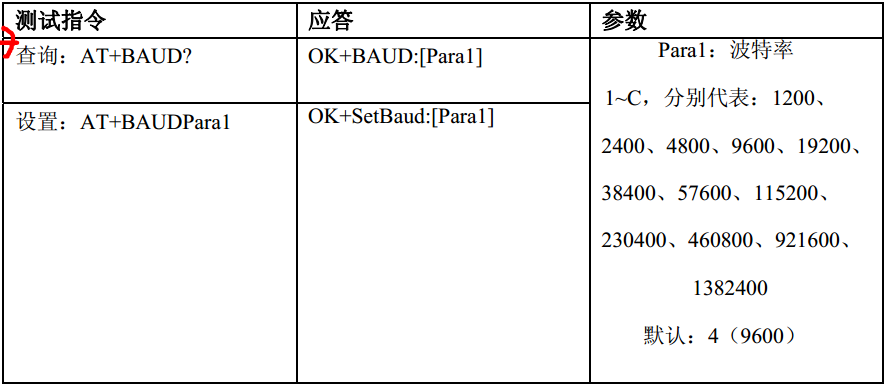
蓝牙模块出厂默认的串口配置为:波特率9600,无校验,数据位8,停止位1。
PS:接下来说明以上位机为电脑,模块参数为出厂设置时进行配置说明。
>_<" 将模块通过USB电平转换板连接到电脑USB口(USB转TTL),使用串口调试助手,按
照 9600,N,8,1 进行配置,打开串口后,发送 AT(无\r\n),若返回 OK,说明配置
成功。
PS:设置 AT 指令必须在蓝牙模块未连接或断开 SPP 链接时才可以(上电或配对
后都可以,如果连接 SPP,串口输入的数据将会直接发送到远端蓝牙设备串口)
1.4.1、测试指令:
![]()
1.4.2、查询\设置波特率指令:
1.4.3、查询\设置设备名称指令:

1.4.4、恢复默认设置指令:
![]()
1.4.5、模块复位\重启指令:
![]()
1.4.6、查询\设置主从模式:

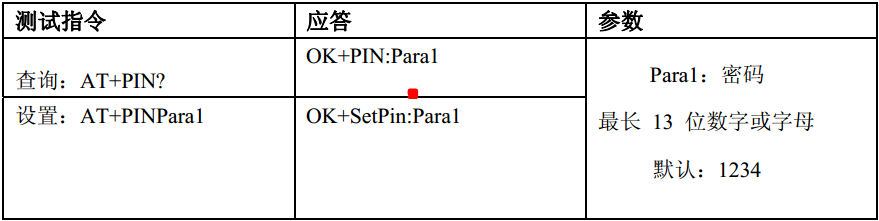
1.4.7、查询\设置配对密码:
1.4.8、查询\设置是否需要密码鉴权:

PS:为方便使用,默认为不用密码鉴权连接,搜索到蓝牙串口之后,直接连接
可。有安全考虑的客户请选择需要密码鉴权。
PS:此指令只有在从设备时才有效;主设备时不接受此指令,发送此指令没
有回复,也不执行
1.4.9、清除主设备配对信息指令:
![]()
PS:此指令只有在主设备时才有效;从设备时不接受此指令,发送此指令
没有回复,也不执行。
1.4.10、搜索并连接新的蓝牙串口从设备(*)指令:
![]()
PS:此指令只有在主设备时才有效;从设备时不接受此指令,发送此指令没
有回复,也不执行。
1.4.11、连接最后一次连接的蓝牙串口从设备(*)指令:
![]()
PS:此指令只有在主设备时才有效;从设备时不接受此指令,发送此指令没
有回复,也不执行。
1.4.12、连接指定蓝牙地址的从设备(*)指令:

PS:此指令只有在主设备时才有效;从设备时不接受此指令,发送此指令没
有回复,也不执行。
1.4.13、查询、设置软件版本指令:

1.4.14、系统帮助指令:

1.4.15、查询本机MAC 地址指令:

>_<: 1:所有参数设置后存储在模块内,下次启动时无需再次设置
2:AT 指令后标注*号的,表示目前未应用的AT 指令
二、蓝牙模块配置与笔记本电脑相连
2.1.1、蓝牙初始化配置:
将蓝牙模块通过TTL转USB模块连接到笔记本,打开串口助手,通过上述AT指令设置为从设备,波特率为9600,然后重启
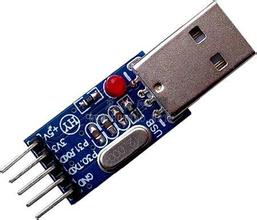 [图:USB转TTL模块]
[图:USB转TTL模块]
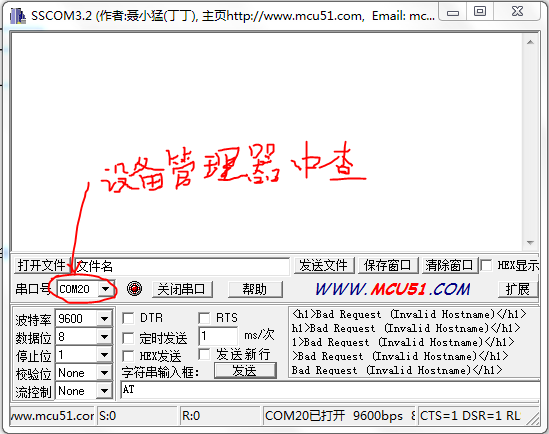 [图:串口助手]
[图:串口助手]
2.1.2、电脑为主设备搜索建立连接:
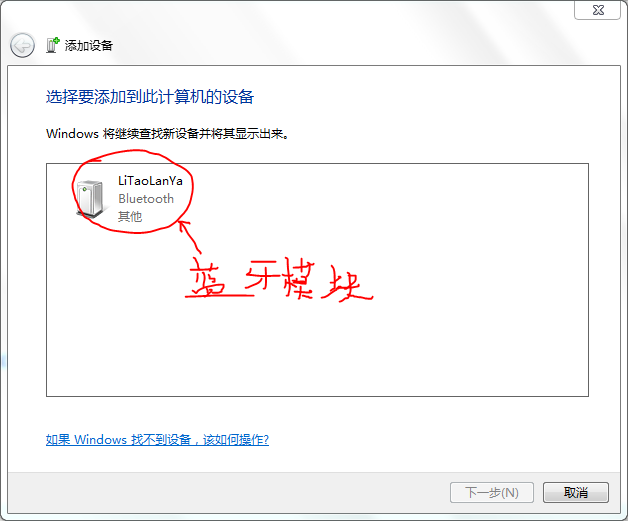
点击笔记本蓝牙标志的小图标,添加蓝牙设备:

然后要等一会,笔记本正在装驱动:
然后右击蓝牙图标,查看蓝牙设备,可见我们的设备已经被电脑发现并添加:

查看该设备属性,此时笔记本为该设备提供一个串口,就是笔记本蓝牙和设备蓝牙通信的通道,要记住这个一会编程的时候会用到:

PS:这个COM15也可以在设备管理器中修改为其他通道
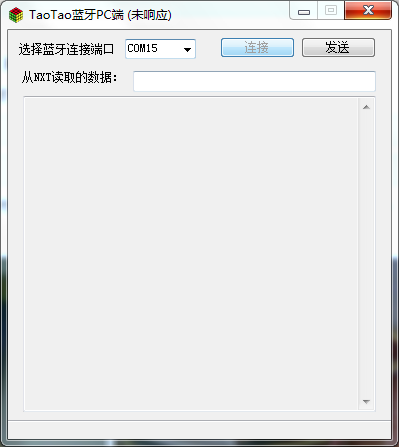
三、C#编程使笔记本蓝牙和外部设备蓝牙通信:
其实配对以后,蓝牙就被模拟成了一个端口,我们可以用最简单的端口通讯来收发信息。首先,在每次启动时,需要连接端口:
[FORM初始化时获取所有的COM口,并加入下拉列表]

1 public Form1() 2 { 3 InitializeComponent(); 4 5 //Get all port list for selection 6 //获得所有的端口列表,并显示在列表内 7 PortList.Items.Clear(); 8 string[] Ports = SerialPort.GetPortNames(); 9 10 for (int i = 0; i < Ports.Length; i++) 11 { 12 string s = Ports[i].ToUpper(); 13 Regex reg = new Regex("[^COM\\d]", RegexOptions.IgnoreCase | RegexOptions.Multiline); 14 s = reg.Replace(s, ""); 15 16 PortList.Items.Add(s); 17 } 18 if (Ports.Length > 1) PortList.SelectedIndex = 1; 19 }
[连接按钮事件:选中list中的被选中的COM口进行连接,如果连接成功就在状态栏显示蓝牙连接成功]
1 private void ConnectButton_Click(object sender, EventArgs e) 2 { 3 if (!BluetoothConnection.IsOpen) 4 { 5 //Start 6 Status = "正在连接蓝牙设备"; 7 BluetoothConnection = new SerialPort(); 8 ConnectButton.Enabled = false; 9 BluetoothConnection.PortName = PortList.SelectedItem.ToString(); 10 BluetoothConnection.Open(); 11 BluetoothConnection.ReadTimeout = 10000; 12 BluetoothConnection.DataReceived += new SerialDataReceivedEventHandler(BlueToothDataReceived); 13 Status = "蓝牙连接成功"; 14 } 15 }
[蓝牙接收数据事件响应函数,在按钮连接事件中声明的该事件,用于响应蓝牙数据接收]
1 private void BlueToothDataReceived(object o, SerialDataReceivedEventArgs e) 2 { 3 //int length = BluetoothConnection.ReadByte(); 4 Thread.Sleep(1000); 5 int length = 13; 6 BlueToothReceivedData = DateTime.Now.ToLongTimeString() + "\r\n"; 7 BlueToothReceivedData += "收到字节数:" + length + "\r\n"; 8 9 byte[] data = new byte[length]; 10 BluetoothConnection.Read(data,0,length); 11 for (int i = 0; i < length; i++) 12 { 13 BlueToothReceivedData += string.Format("data[{0}] = {1}\r\n", i, data[i]); 14 } 15 //receive close message 16 if (length == 3 && data[0] == 255 && data[1] == 255 && data[2] == 255) 17 { 18 //Stop 19 Status = "正在断开蓝牙设备"; 20 BluetoothConnection.Close(); 21 BluetoothConnection.Dispose(); 22 BluetoothConnection = null; 23 ConnectButton.Enabled = true; 24 Status = "蓝牙断开成功"; 25 } 26 }
- 这里第4行让程序休息1是因为延时等待从设备把数据发送完全。
- 这里为了方便我严格控制让发送数据为13Byte。
- 从设备发送的13Byte数据送至缓冲区,PC端C#程序通过read()函数将缓冲区数据接收到data中,下面是格式输出一下数据。
[发送数据函数]
1 private void BlueToothDataSend(byte[] data) 2 { 3 //int length = data.Length; 4 //byte[] readData = new byte[length + 2]; 5 //readData[0] = (byte)(length % 255); 6 //readData[1] = (byte)(length / 255); 7 //for (int i = 0; i < length; i++) 8 //{ 9 // readData[i + 2] = data[i]; 10 //} 11 //BluetoothConnection.Write(readData, 0, length + 2); 12 BluetoothConnection.Write(data, 0, 1); 13 //Status = "发送数据字节数:" + length; 14 }
- 本来是将data[]数据发送出去,因为我从设备设置为只要有数据发送过来就做出响应发送13Byte数据,所以就直接将data的第一byte发送出去了。
[定时器函数:用于刷新状态栏,和接收数据显示]
1 private void MonitorTimer_Tick(object sender, EventArgs e) 2 { 3 StatusMessage.Text = Status; 4 BlueToothMessage.Text = BlueToothReceivedData; 5 }
[发送数据按钮:将SendMessage中的数据获得发送出去]
1 private void SendButton_Click(object sender, EventArgs e) 2 { 3 byte n; 4 byte.TryParse(SendMessage.Text, out n); 5 6 BlueToothDataSend(new byte[] { n }); 7 }
四、PC和51单片机通过蓝牙连接展示
4.1.1、51单片机部分程序
一定要用11.0952Mhz的晶振,我用12Mhz结果出现帧丢失!其实这里采用的是52单片机,在此处区别不是很大~
将蓝牙模块的RXD连接单片机的RXD(P3.0),TXD连接单片机的TXD(P3.1),然后就像以前操作串口一样操作就行啦~


1 #include <REG52.H> 2 #include <INTRINS.H> 3 typedef unsigned char uchar; 4 typedef unsigned short ushort; 5 typedef unsigned int uint; 6 7 sbit SCL=P1^0; //IIC时钟引脚定义 8 sbit SDA=P1^1; //IIC数据引脚定义 9 10 #define SlaveAddress 0xD0 //IIC写入时的地址字节数据,+1为读取 11 //************************************** 12 //延时5微秒(STC90C52RC@12M) 13 //不同的工作环境,需要调整此函数 14 //当改用1T的MCU时,请调整此延时函数 15 //************************************** 16 void Delay5us() 17 { 18 _nop_();_nop_();_nop_();_nop_(); 19 _nop_();_nop_();_nop_();_nop_(); 20 _nop_();_nop_();_nop_();_nop_(); 21 _nop_();_nop_();_nop_();_nop_(); 22 _nop_();_nop_();_nop_();_nop_(); 23 _nop_();_nop_();_nop_();_nop_(); 24 } 25 //************************************** 26 //I2C起始信号 27 //************************************** 28 void I2C_Start() 29 { 30 SDA = 1; //拉高数据线 31 SCL = 1; //拉高时钟线 32 Delay5us(); //延时 33 SDA = 0; //产生下降沿 34 Delay5us(); //延时 35 SCL = 0; //拉低时钟线 36 } 37 //************************************** 38 //I2C停止信号 39 //************************************** 40 void I2C_Stop() 41 { 42 SDA = 0; //拉低数据线 43 SCL = 1; //拉高时钟线 44 Delay5us(); //延时 45 SDA = 1; //产生上升沿 46 Delay5us(); //延时 47 } 48 //************************************** 49 //I2C发送应答信号 50 //入口参数:ack (0:ACK 1:NAK) 51 //************************************** 52 void I2C_SendACK(bit ack) 53 { 54 SDA = ack; //写应答信号 55 SCL = 1; //拉高时钟线 56 Delay5us(); //延时 57 SCL = 0; //拉低时钟线 58 Delay5us(); //延时 59 } 60 //************************************** 61 //I2C接收应答信号 62 //************************************** 63 bit I2C_RecvACK() 64 { 65 SCL = 1; //拉高时钟线 66 Delay5us(); //延时 67 CY = SDA; //读应答信号 68 SCL = 0; //拉低时钟线 69 Delay5us(); //延时 70 return CY; 71 } 72 //************************************** 73 //向I2C总线发送一个字节数据 74 //************************************** 75 void I2C_SendByte(uchar dat) 76 { 77 uchar i; 78 for (i=0; i<8; i++) //8位计数器 79 { 80 dat <<= 1; //移出数据的最高位 81 SDA = CY; //送数据口 82 SCL = 1; //拉高时钟线 83 Delay5us(); //延时 84 SCL = 0; //拉低时钟线 85 Delay5us(); //延时 86 } 87 I2C_RecvACK(); 88 } 89 //************************************** 90 //从I2C总线接收一个字节数据 91 //************************************** 92 uchar I2C_RecvByte() 93 { 94 uchar i; 95 uchar dat = 0; 96 SDA = 1; //使能内部上拉,准备读取数据, 97 for (i=0; i<8; i++) //8位计数器 98 { 99 dat <<= 1; 100 SCL = 1; //拉高时钟线 101 Delay5us(); //延时 102 dat |= SDA; //读数据 103 SCL = 0; //拉低时钟线 104 Delay5us(); //延时 105 } 106 return dat; 107 } 108 //************************************** 109 //向I2C设备写入一个字节数据 110 //************************************** 111 void Single_WriteI2C(uchar REG_Address,uchar REG_data) 112 { 113 I2C_Start(); //起始信号 114 I2C_SendByte(SlaveAddress); //发送设备地址+写信号 115 I2C_SendByte(REG_Address); //内部寄存器地址, 116 I2C_SendByte(REG_data); //内部寄存器数据, 117 I2C_Stop(); //发送停止信号 118 } 119 //************************************** 120 //从I2C设备读取一个字节数据 121 //************************************** 122 uchar Single_ReadI2C(uchar REG_Address) 123 { 124 uchar REG_data; 125 I2C_Start(); //起始信号 126 I2C_SendByte(SlaveAddress); //发送设备地址+写信号 127 I2C_SendByte(REG_Address); //发送存储单元地址,从0开始 128 I2C_Start(); //起始信号 129 I2C_SendByte(SlaveAddress+1); //发送设备地址+读信号 130 REG_data=I2C_RecvByte(); //读出寄存器数据 131 I2C_SendACK(1); //接收应答信号 132 I2C_Stop(); //停止信号 133 return REG_data; 134 }
1 // GY-52 MPU6050 IIC测试程序 2 // 使用单片机STC89C51 3 // 晶振:11.0592M 4 // 编译环境 Keil uVision2 5 6 #include <REG52.H> 7 #include <math.h> //Keil library 8 #include <stdio.h> //Keil library 9 10 typedef unsigned char uchar; 11 typedef unsigned short ushort; 12 typedef unsigned int uint; 13 14 uchar usart_flag,receive_data;//串口中断接收标志和串口接收数据 15 //**************************************** 16 // 定义MPU6050内部地址 17 //**************************************** 18 #define SMPLRT_DIV 0x19 //陀螺仪采样率,典型值:0x07(125Hz) 19 #define CONFIG 0x1A //低通滤波频率,典型值:0x06(5Hz) 20 #define GYRO_CONFIG 0x1B //陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s) 21 #define ACCEL_CONFIG 0x1C //加速计自检、测量范围及高通滤波频率,典型值:0x01(不自检,2G,5Hz) 22 #define ACCEL_XOUT_H 0x3B 23 #define ACCEL_XOUT_L 0x3C 24 #define ACCEL_YOUT_H 0x3D 25 #define ACCEL_YOUT_L 0x3E 26 #define ACCEL_ZOUT_H 0x3F 27 #define ACCEL_ZOUT_L 0x40 28 #define TEMP_OUT_H 0x41 29 #define TEMP_OUT_L 0x42 30 #define GYRO_XOUT_H 0x43 31 #define GYRO_XOUT_L 0x44 32 #define GYRO_YOUT_H 0x45 33 #define GYRO_YOUT_L 0x46 34 #define GYRO_ZOUT_H 0x47 35 #define GYRO_ZOUT_L 0x48 36 #define PWR_MGMT_1 0x6B //电源管理,典型值:0x00(正常启用) 37 #define WHO_AM_I 0x75 //IIC地址寄存器(默认数值0x68,只读) 38 39 40 //**************************************** 41 //函数声明 42 //**************************************** 43 void delay(unsigned int k); //延时 44 void SeriPushSend(uchar send_data); //串口发送函数 45 void InitMPU6050(); //陀螺仪初始化 46 int GetData(uchar REG_Address); //合成数据并发送原数据 47 void init_uart(); //串口初始化 48 void SeriPushSend(uchar send_data); //串口发送函数 49 50 extern uchar Single_ReadI2C(uchar REG_Address); //读取I2C数据 51 extern void Single_WriteI2C(uchar REG_Address,uchar REG_data); //向I2C写入数据 52 53 54 //**************************************** 55 //延时 56 //**************************************** 57 void delay(unsigned int k) 58 { 59 unsigned int i,j; 60 for(i=0;i<k;i++) 61 { 62 for(j=0;j<121;j++); 63 } 64 } 65 //************************************** 66 //初始化MPU6050 67 //************************************** 68 void InitMPU6050() 69 { 70 Single_WriteI2C(PWR_MGMT_1, 0x00); //解除休眠状态 71 Single_WriteI2C(SMPLRT_DIV, 0x07); 72 Single_WriteI2C(CONFIG, 0x06); 73 Single_WriteI2C(GYRO_CONFIG, 0x18); 74 Single_WriteI2C(ACCEL_CONFIG, 0x01); 75 } 76 //************************************** 77 //合成数据并发送原数据 78 //************************************** 79 int GetData(uchar REG_Address) 80 { 81 uchar H,L; 82 H=Single_ReadI2C(REG_Address); 83 L=Single_ReadI2C(REG_Address+1); 84 SeriPushSend(H);//发送出去 85 SeriPushSend(L); 86 return (H<<8)+L; //合成数据 87 } 88 //************************************** 89 //串口初始化 90 //************************************** 91 void init_uart() 92 { 93 TMOD=0x20; //设置T1定时器工作方式2 94 TH1=0xfd; //T1装初值 95 TL1=0xfd; 96 TR1=1; //启动T1定时器 97 REN=1; //允许串口中断接收 98 SM0=0; //设置串口工作方式 99 SM1=1; 100 EA=1; //开总中断 101 ES=1; //开串口中断 102 } 103 //**************************************** 104 //串口发送函数 105 //**************************************** 106 void SeriPushSend(uchar send_data) 107 { 108 SBUF=send_data; 109 while(!TI);TI=0; 110 } 111 //**************************************** 112 //串口接收函数 113 //**************************************** 114 void ser()interrupt 4 115 { 116 RI=0; 117 receive_data=SBUF; 118 usart_flag=1; 119 } 120 //********************************************************* 121 //主程序 122 //********************************************************* 123 void main() 124 { 125 delay(500); //上电延时 126 init_uart(); 127 InitMPU6050(); //初始化MPU6050 128 delay(150); 129 while(1) 130 { 131 if(usart_flag==1) //有数据传过来 132 { 133 ES=0; //关闭串口中断 134 SeriPushSend(0xff); 135 GetData(ACCEL_XOUT_H); //发送X轴加速度 136 GetData(ACCEL_YOUT_H); //发送Y轴加速度 137 GetData(ACCEL_ZOUT_H); //发送Z轴加速度 138 GetData(GYRO_XOUT_H); //发送X轴角速度 139 GetData(GYRO_YOUT_H); //发送Y轴角速度 140 GetData(GYRO_ZOUT_H); //发送Z轴角速度 141 142 ES=1; 143 usart_flag=0; 144 } 145 } 146 }
因为我还在P1.0和P1.1连接一个陀螺仪MPU6050所以上面的代码有点烦,其实可以参考一下我以前发的51单片机串口通信~
http://www.cnblogs.com/zjutlitao/p/3788696.htm


4.1.2、没有51单片机的情况
可以将蓝牙模块连接在USB转TTL上,用串口助手和你写的C#程序相互通信。
4.1.3、运行C#程序进行连接通信
[选择刚才的那个蓝牙端口点击连接]
[第一次蓝牙图标会给出一个验证提示:在验证框内输入AT指令配置时的你设置的验证码]

[然后就可以通信啦,如下:]

PS:相关代码及资料
C#蓝牙工程代码:http://pan.baidu.com/s/1hqHwG4W
51蓝牙工程代码:http://pan.baidu.com/s/1dDqywVZ
蓝牙模块说明书:http://pan.baidu.com/s/1kT61nx1
C#蓝牙相关博客链接:http://www.diy-robots.com/?p=410%20%E8%93%9D%E7%89%99

【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步