(原创)BFS广度优先算法,看完这篇就够了
BFS算法
上一篇文章讲解了DFS深度优先遍历的算法,我们说 DFS 顾名思义DEEPTH FIRET,以深度为第一标准来查找,以不撞南墙不回头的态度来发掘每一个点,这个算法思想get到了其实蛮简单。那么 BFS 和DFS有什么相同点和不同点呢?
我觉得有一种比喻对于 DFS 和 BFS 从方法论的角度解释很到位,DFS 就像是小明要在家里找到钥匙,因为对位置的不确定,所以一间一间的来找,深度遍历能确保小明走过所有的屋子。而 BFS 像是近视的小明的眼镜掉在了地上,小明肯定是先摸索离手比较近的位置,然后手慢慢向远方延伸,直至摸到眼镜,像是以小明为中心搜索圈不断扩大的过程。所以如果说 DFS 从遍历的层次结构上类似树的先序遍历,那么BFS算法按照里外顺序逐渐增加深度的做法,就像极了朴素的层次遍历,例如:
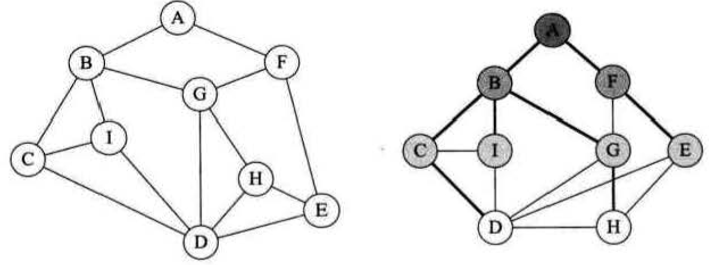
把左图拉平,按照层序把结点排列下来,各节点的连接关系并没有变,图结构没有发生变化,但是这时,我们从A出发,按层序遍历可以得到顺序是 A B F C I G E D H
结合上一篇文章的 DFS ,我们可以发现这两种算法的区别在每一个点上都能得以体现,比如 A 点,DFS 鼓励结点向着一个方向冲,BFS 则会在一个点上按照顶点下标次序遍历完所有没有访问过的结点,比如A点遍历完,马上开始扫描,如果 B F这两个点没有被宠幸过,那么一定要翻完 B、F 这两个点的牌子之后,才会继续访问第二层,即把A点相连的结点全部遍历完成才行,当然到了第二层 发现 B、F 早就被A安排过了,就不再进入这两个点的循环,后面的一样,这里就不再赘述。
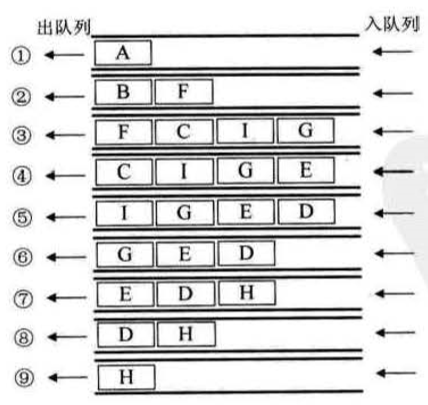
我们回忆一下DFS算法,DFS沿着一个方向走最后是要走回头路的,因为它迟早会遍历到一个所有分支都被访问过的结点,那么要走回头路意味着我们实现 DFS 时应该选择后进先出的栈结构,而现在的 BFS 算法是每经过一个点就会遍历所有没访问过的点,同时,一个点如果已经访问完,那么它就没有利用价值了,所以应该使用队列先进先出的特点
这里是图形演示:
下面我们来看代码实现:
这是邻接矩阵实现 BFS 算法,结构定义见上一篇文章
void BFS(MGraph *G) { int i,j; Queue Q; InitQueue(&Q); for(i = 0; i < G.numVertexes;i++) { visited[i] = FALSE; } for(i = 0;i < G.numVertexes;i++) { if(!visited[i]) { visited[i] = TRUE; printf("%c",&G.vexs[i]); EnQueue(&Q,i); while(!QueueEmpty(Q)) { DeQueue(&Q,&i); for(j = 0;j < G.numVertexes;j++) { while(G.arc[i][j] == 1 && !visited[j]) { visited[j] = TRUE; printf("%c",G.vexs[j]); EnQueue(&Q,j); } } } } } }
这是邻接表实现的代码:
void BFS(GraphAdjList GL) { int i; Queue Q; EdgeNode *p; InitQueue (&Q); for(i = 0;i < GL->shuliang;i++) { visited[i] = FALSE; } for(i = 0;i < GL->shuliang;i++) { if(!visited[i]) { visited[i] = TURE; printf("%c",GL->adjlist[i].data); EnQueue(&Q,i); while(!QueueEmpty(Q)) { DeQueue(&Q,&i); p = GL->adjlist[i].firstedge; while(p) { if(!visited[p -> adjvex]) { visited[p -> adjvex] = TRUE; printf("%c",GL->adjlist[p -> adjvex].data); EnQueue(&Q,p->adjvex); } p = p -> next; } } } } }

