Cartographer源码阅读(5):PoseGraph位姿图
PoseGraph位姿图
mapping2D::PoseGraph类的注释:
|
// Implements the loop closure method called Sparse Pose Adjustment (SPA) from |
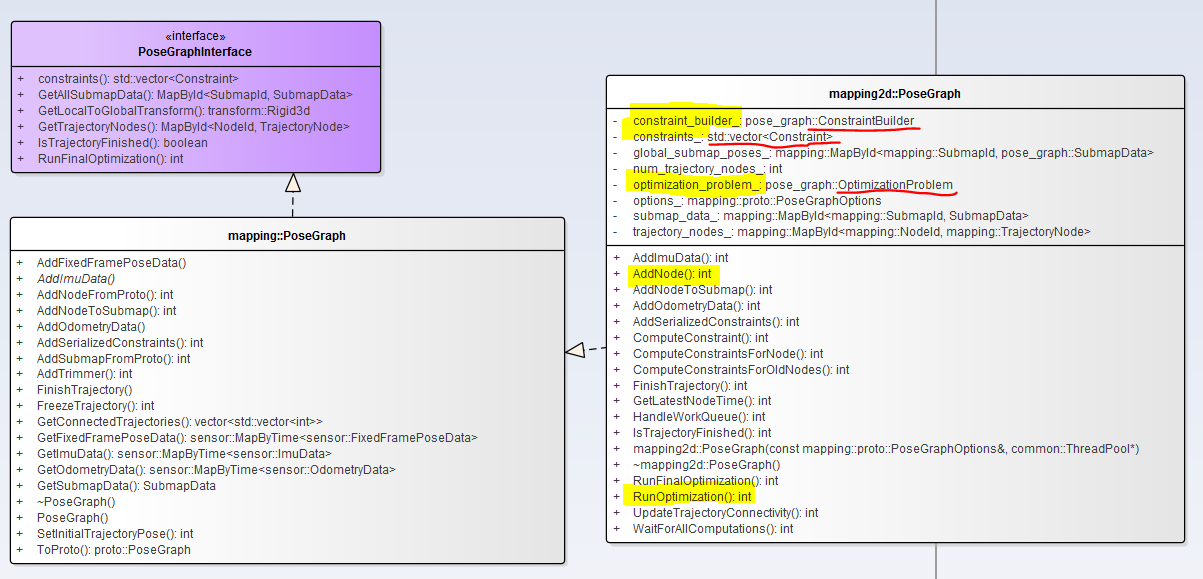
1.继承关系mapping,mapping2D,mapping3D (以前叫sparse_pose_graph.h,目前名称被修改了)
类中一个很重要的类OptimizationProblem对象optimization_problem_,该类的注释是Implements the SPA loop closure method.即实现了SPA方法的闭环。
类的主要成员变量和成员函数如类图所示,其中重要的方法PoseGraph::RunOptimization()。
pose_graph::OptimizationProblem optimization_problem_;
pose_graph::ConstraintBuilder constraint_builder_ GUARDED_BY(mutex_);
std::vector<Constraint> constraints_ GUARDED_BY(mutex_);
接上一篇在PoseGraph::AddNode方法中调用了 AddTrajectoryIfNeeded() 和 PoseGraph::ComputeConstraintsForNode()方法。
1 void PoseGraph::ComputeConstraintsForNode( 2 const mapping::NodeId& node_id, 3 std::vector<std::shared_ptr<const Submap>> insertion_submaps, 4 const bool newly_finished_submap) { 5 const auto& constant_data = trajectory_nodes_.at(node_id).constant_data; 6 const std::vector<mapping::SubmapId> submap_ids = InitializeGlobalSubmapPoses( 7 node_id.trajectory_id, constant_data->time, insertion_submaps); 8 CHECK_EQ(submap_ids.size(), insertion_submaps.size()); 9 const mapping::SubmapId matching_id = submap_ids.front(); 10 const transform::Rigid2d pose = transform::Project2D( 11 constant_data->local_pose * 12 transform::Rigid3d::Rotation(constant_data->gravity_alignment.inverse())); 13 const transform::Rigid2d optimized_pose = 14 optimization_problem_.submap_data().at(matching_id).global_pose * 15 pose_graph::ComputeSubmapPose(*insertion_submaps.front()).inverse() * 16 pose; 17 optimization_problem_.AddTrajectoryNode( 18 matching_id.trajectory_id, constant_data->time, pose, optimized_pose, 19 constant_data->gravity_alignment); 20 for (size_t i = 0; i < insertion_submaps.size(); ++i) { 21 const mapping::SubmapId submap_id = submap_ids[i]; 22 // Even if this was the last node added to 'submap_id', the submap will only 23 // be marked as finished in 'submap_data_' further below. 24 CHECK(submap_data_.at(submap_id).state == SubmapState::kActive); 25 submap_data_.at(submap_id).node_ids.emplace(node_id); 26 const transform::Rigid2d constraint_transform = 27 pose_graph::ComputeSubmapPose(*insertion_submaps[i]).inverse() * pose; 28 constraints_.push_back(Constraint{submap_id, 29 node_id, 30 {transform::Embed3D(constraint_transform), 31 options_.matcher_translation_weight(), 32 options_.matcher_rotation_weight()}, 33 Constraint::INTRA_SUBMAP}); 34 } 35 36 for (const auto& submap_id_data : submap_data_) { 37 if (submap_id_data.data.state == SubmapState::kFinished) { 38 CHECK_EQ(submap_id_data.data.node_ids.count(node_id), 0); 39 ComputeConstraint(node_id, submap_id_data.id); 40 } 41 } 42 43 if (newly_finished_submap) { 44 const mapping::SubmapId finished_submap_id = submap_ids.front(); 45 SubmapData& finished_submap_data = submap_data_.at(finished_submap_id); 46 CHECK(finished_submap_data.state == SubmapState::kActive); 47 finished_submap_data.state = SubmapState::kFinished; 48 // We have a new completed submap, so we look into adding constraints for 49 // old nodes. 50 ComputeConstraintsForOldNodes(finished_submap_id); 51 } 52 constraint_builder_.NotifyEndOfNode(); 53 ++num_nodes_since_last_loop_closure_; 54 if (options_.optimize_every_n_nodes() > 0 && 55 num_nodes_since_last_loop_closure_ > options_.optimize_every_n_nodes()) { 56 CHECK(!run_loop_closure_); 57 run_loop_closure_ = true; 58 // If there is a 'work_queue_' already, some other thread will take care. 59 if (work_queue_ == nullptr) { 60 work_queue_ = common::make_unique<std::deque<std::function<void()>>>(); 61 HandleWorkQueue(); 62 } 63 } 64 }
可以看到对本类中ComputeConstraint、ComputeConstraintsForOldNodes、HandleWorkQueue方法的调用。这里有个pose_graph::ComputeSubmapPose方法在cartographer/mapping_2d/pose_graph/constraint_builder.h文件中。子图submap位姿?
transform::Rigid2d ComputeSubmapPose(const Submap& submap) { return transform::Project2D(submap.local_pose()); }
注意HandleWorkQueue()方法中调用了RunOptimization方法。


1 void PoseGraph::HandleWorkQueue() { 2 constraint_builder_.WhenDone( 3 [this](const pose_graph::ConstraintBuilder::Result& result) { 4 { 5 common::MutexLocker locker(&mutex_); 6 constraints_.insert(constraints_.end(), result.begin(), result.end()); 7 } 8 RunOptimization(); 9 10 common::MutexLocker locker(&mutex_); 11 for (const Constraint& constraint : result) { 12 UpdateTrajectoryConnectivity(constraint); 13 } 14 TrimmingHandle trimming_handle(this); 15 for (auto& trimmer : trimmers_) { 16 trimmer->Trim(&trimming_handle); 17 } 18 trimmers_.erase( 19 std::remove_if( 20 trimmers_.begin(), trimmers_.end(), 21 [](std::unique_ptr<mapping::PoseGraphTrimmer>& trimmer) { 22 return trimmer->IsFinished(); 23 }), 24 trimmers_.end()); 25 26 num_nodes_since_last_loop_closure_ = 0; 27 run_loop_closure_ = false; 28 while (!run_loop_closure_) { 29 if (work_queue_->empty()) { 30 work_queue_.reset(); 31 return; 32 } 33 work_queue_->front()(); 34 work_queue_->pop_front(); 35 } 36 LOG(INFO) << "Remaining work items in queue: " << work_queue_->size(); 37 // We have to optimize again. 38 HandleWorkQueue(); 39 }); 40 }
查看PoseGraph::RunOptimization方法,
1 void PoseGraph::RunOptimization() 2 { 3 if (optimization_problem_.submap_data().empty()) 4 { 5 return; 6 } 7 8 // No other thread is accessing the optimization_problem_, constraints_ and 9 // frozen_trajectories_ when executing the Solve. Solve is time consuming, so 10 // not taking the mutex before Solve to avoid blocking foreground processing. 11 optimization_problem_.Solve(constraints_, frozen_trajectories_); 12 common::MutexLocker locker(&mutex_); 13 14 const auto& submap_data = optimization_problem_.submap_data(); 15 const auto& node_data = optimization_problem_.node_data(); 16 for (const int trajectory_id : node_data.trajectory_ids()) 17 { 18 for (const auto& node : node_data.trajectory(trajectory_id)) 19 { 20 auto& mutable_trajectory_node = trajectory_nodes_.at(node.id); 21 mutable_trajectory_node.global_pose = 22 transform::Embed3D(node.data.pose) * 23 transform::Rigid3d::Rotation(mutable_trajectory_node.constant_data->gravity_alignment); 24 } 25 26 // Extrapolate all point cloud poses that were not included in the 27 // 'optimization_problem_' yet. 28 const auto local_to_new_global = 29 ComputeLocalToGlobalTransform(submap_data, trajectory_id); 30 const auto local_to_old_global = 31 ComputeLocalToGlobalTransform(global_submap_poses_, trajectory_id); 32 const transform::Rigid3d old_global_to_new_global = 33 local_to_new_global * local_to_old_global.inverse(); 34 35 const mapping::NodeId last_optimized_node_id = 36 std::prev(node_data.EndOfTrajectory(trajectory_id))->id; 37 auto node_it = std::next(trajectory_nodes_.find(last_optimized_node_id)); 38 for (; node_it != trajectory_nodes_.EndOfTrajectory(trajectory_id); ++node_it) 39 { 40 auto& mutable_trajectory_node = trajectory_nodes_.at(node_it->id); 41 mutable_trajectory_node.global_pose = 42 old_global_to_new_global * mutable_trajectory_node.global_pose; 43 } 44 } 45 global_submap_poses_ = submap_data; 46 }
查看Constraint 结构体,该结构体在PoseGraphInterface中定义。
1 // A "constraint" as in the paper by Konolige, Kurt, et al. "Efficient sparse 2 // pose adjustment for 2d mapping." Intelligent Robots and Systems (IROS), 3 // 2010 IEEE/RSJ International Conference on (pp. 22--29). IEEE, 2010. 4 struct Constraint { 5 struct Pose { 6 transform::Rigid3d zbar_ij; 7 double translation_weight; 8 double rotation_weight; 9 }; 10 11 SubmapId submap_id; // 'i' in the paper. 12 NodeId node_id; // 'j' in the paper. 13 14 // Pose of the node 'j' relative to submap 'i'. 15 Pose pose; 16 17 // Differentiates between intra-submap (where node 'j' was inserted into 18 // submap 'i') and inter-submap constraints (where node 'j' was not inserted 19 // into submap 'i'). 20 enum Tag { INTRA_SUBMAP, INTER_SUBMAP } tag; 21 };
