


隐型马尔科夫模型(HMM)向前算法实例讲解(暴力求解+代码实现)---盒子模型
先来解释一下HMM的向前算法:
前向后向算法是前向算法和后向算法的统称,这两个算法都可以用来求HMM观测序列的概率。我们先来看看前向算法是如何求解这个问题的。
前向算法本质上属于动态规划的算法,也就是我们要通过找到局部状态递推的公式,这样一步步的从子问题的最优解拓展到整个问题的最优解。在这里我们认为随机过程中各个状态St的概率分布,只与它的前一个状态St-1有关,同时任何时刻的观察状态只仅仅依赖于当前时刻的隐藏状态。
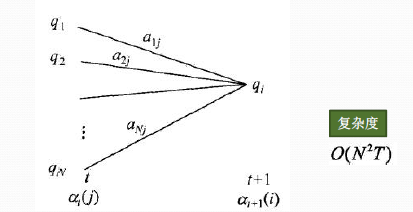
在t时刻我们定义观察状态的概率为:
αt(i)=P(o1,o2,...ot,it=qi|λ)
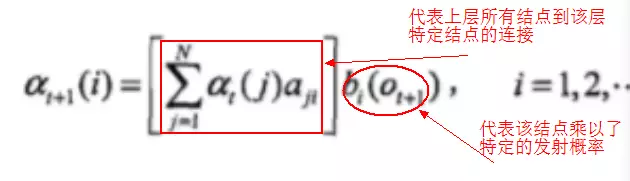
从下图可以看出,我们可以基于时刻t时各个隐藏状态的前向概率,再乘以对应的状态转移概率,即αt(j)aji就是在时刻t观测到o1,o2,...ot,即时刻t隐藏状态qj,qj总和再乘以该时刻的发射概率得到时刻t+1隐藏状态qi的概率。
下面总结下前向算法。
输入:HMM模型λ=(A,B,Π)λ=(A,B,Π),观测序列O=(o1,o2,...oT)
输出:观测序列概率P(O|λ)
1) 计算时刻1的各个隐藏状态前向概率:
2) 递推时刻2,3,...T时刻的前向概率:
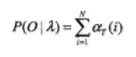
3) 计算最终结果:
从递推公式可以看出,我们的算法时间复杂度是O(TN2),比暴力解法的时间复杂度O(TNT)少了几个数量级。
实例说明:
3个盒子,每个盒子都有红、白两种球,具体情况如下:
盒子 1 2 3
红球数 5 4 7
黑球数 5 6 3
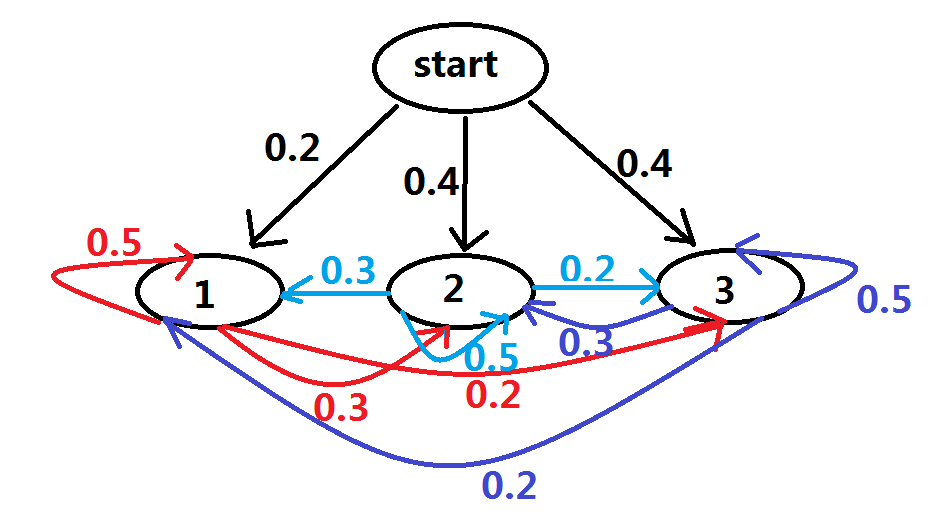
按照下面的方法从盒子里抽球,开始的时候,从第一个盒子抽球的概率是0.2,从第二个盒子抽球的概率是0.4,从第三个盒子抽球的概率是0.4。以这个概率抽一次球后,将球放回。然后从当前盒子转移到下一个盒子进行抽球。规则是:如果当前抽球的盒子是第一个盒子,则以0.5的概率仍然留在第一个盒子继续抽球,以0.2的概率去第二个盒子抽球,以0.3的概率去第三个盒子抽球。如果当前抽球的盒子是第二个盒子,则以0.5的概率仍然留在第二个盒子继续抽球,以0.3的概率去第一个盒子抽球,以0.2的概率去第三个盒子抽球。如果当前抽球的盒子是第三个盒子,则以0.5的概率仍然留在第三个盒子继续抽球,以0.2的概率去第一个盒子抽球,以0.3的概率去第二个盒子抽球。如此下去,直到重复三次,得到一个球的颜色的观测序列:
# -*- coding: UTF-8 -*-
import numpy as np
def Forward(trainsition_probability,emission_probability,pi,obs_seq):
"""
:param trainsition_probability:trainsition_probability是状态转移矩阵
:param emission_probability: emission_probability是发射矩阵
:param pi: pi是初始状态概率
:param obs_seq: obs_seq是观察状态序列
:return: 返回结果
"""
trainsition_probability = np.array(trainsition_probability)
emission_probability = np.array(emission_probability)
pi = np.array(pi)
Row = np.array(trainsition_probability).shape[0]
F = np.zeros((Row,Col)) #最后要返回的就是F,就是我们公式中的alpha
F[:,0] = pi * np.transpose(emission_probability[:,obs_seq[0]]) #这是初始化求第一列,就是初始的概率*各自的发射概率
for t in range(1,len(obs_seq)): #这里相当于填矩阵的元素值
for n in range(Row): #n是代表隐藏状态的
F[n,t] = np.dot(F[:,t-1],trainsition_probability[:,n])*emission_probability[n,obs_seq[t]] #对应于公式,前面是对应相乘
return F
if __name__ == '__main__':
trainsition_probability = [[0.5,0.2,0.3],[0.3,0.5,0.2],[0.2,0.3,0.5]]
emission_probability = [[0.5,0.5],[0.4,0.6],[0.7,0.3]]
pi = [0.2,0.4,0.4]
#然后下面先得到前向算法,在A,B,pi参数已知的前提下,求出特定观察序列的概率是多少?
obs_seq = [0,1,0]
Row = np.array(trainsition_probability).shape[0]
Col = len(obs_seq)
F = Forward(trainsition_probability,emission_probability,pi,obs_seq)
print F
对应结果:
[[ 0.1 0.077 0.04187 ]
[ 0.16 0.1104 0.035512]
[ 0.28 0.0606 0.052836]]

