
0-1背包问题 —— 四种解法解题
(代码是学姐给的一个资料,自己重新编译理解了一遍)
一、题目 :
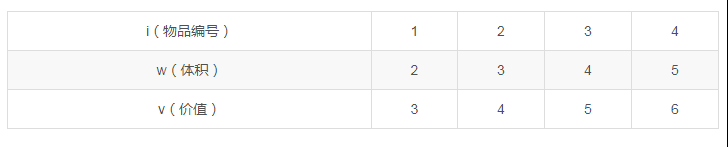
有n个物品,它们有各自的体积和价值,现有给定容量的背包,如何让背包里装入的物品具有最大的价值总和?
eg:number=4,capacity=8
分别用蛮力法、动态规划法、回溯法和分支限界法求解0/1背包问题。
二、所用算法的基本思想及复杂度分析:
1.蛮力法求解0/1背包问题:
1)基本思想:
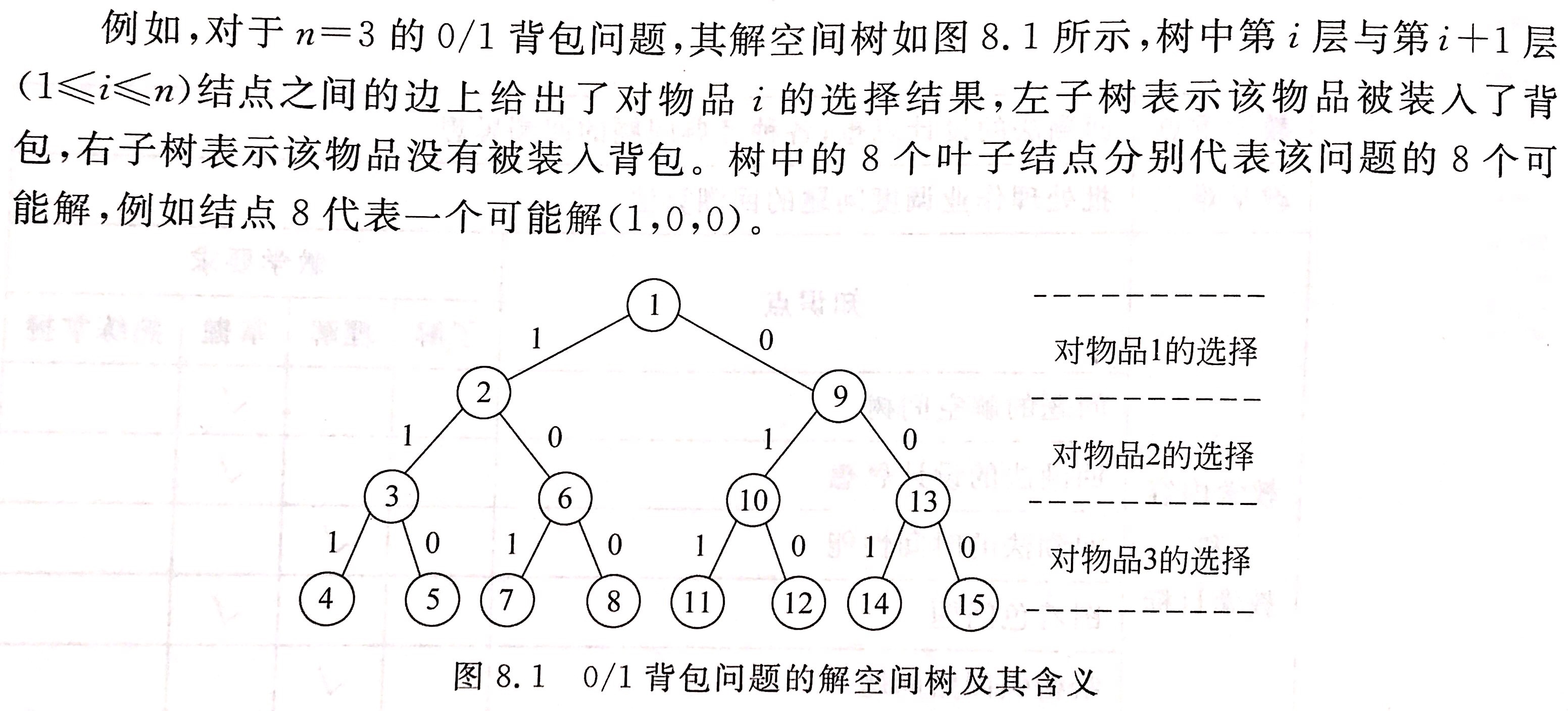
对于有n种可选物品的0/1背包问题,其解空间由长度为n的0-1向量组成,可用子集数表示。在搜索解空间树时,深度优先遍历,搜索每一个结点,无论是否可能产生最优解,都遍历至叶子结点,记录每次得到的装入总价值,然后记录遍历过的最大价值。
2)代码:
#include <iostream> #include<cstdio> using namespace std; #define N 100 struct goods{ int sign;//物品序号 int wight;//物品重量 int value;//物品价值 }; int n,bestValue,cv,cw,C;//物品数量,价值最大,当前价值,当前重量,背包容量 int X[N],cx[N];//最终存储状态,当前存储状态 struct goods goods[N]; int Force(int i){ if(i>n-1){ if(bestValue < cv && cw + goods[i].wight <= C){ for(int k=0;k<n;k++) X[k] = cx[k];//存储最优路径 bestValue = cv; } return bestValue; } cw = cw + goods[i].wight; cv = cv + goods[i].value; cx[i] = 1;//装入背包 Force(i+1); cw = cw-goods[i].wight; cv = cv-goods[i].value; cx[i] = 0;//不装入背包 Force(i+1); return bestValue; } int main() { printf("物品种类n:"); scanf("%d",&n); printf("背包容量C:"); scanf("%d",&C); for(int i=0;i<n;i++){ printf("物品%d的重量w[%d]及其价值v[%d]:",i+1,i+1,i+1); scanf("%d%d",&goods[i].wight,&goods[i].value); } int sum1 = Force(0); printf("蛮力法求解0/1背包问题:\nX=["); for(int i=0;i<n;i++){ cout << X[i]<<" "; } printf("] 装入总价值%d\n",sum1); return 0; }
P.S.蛮力法使用的是递归,递归的使用经常会寄几个看不懂T_T,这里再提一下递归的问题(以后不要再总是看不懂啦,这样会显得自己很辣鸡的有木有!!!)
force(0),向下运行,到force(1),进入force(1),一直到force(n+1),i>n,return 结果,跳出force(n+1),在force(n)处从跳出的地方继续向下走,就是进入减减减的环节了,然后继续向下,还是一样,加到n+1时就会跳出来当前的force,调到前一个force,继续向下,循环进行。
3)复杂度分析:
蛮力法求解0/1背包问题的时间复杂度为:2^n
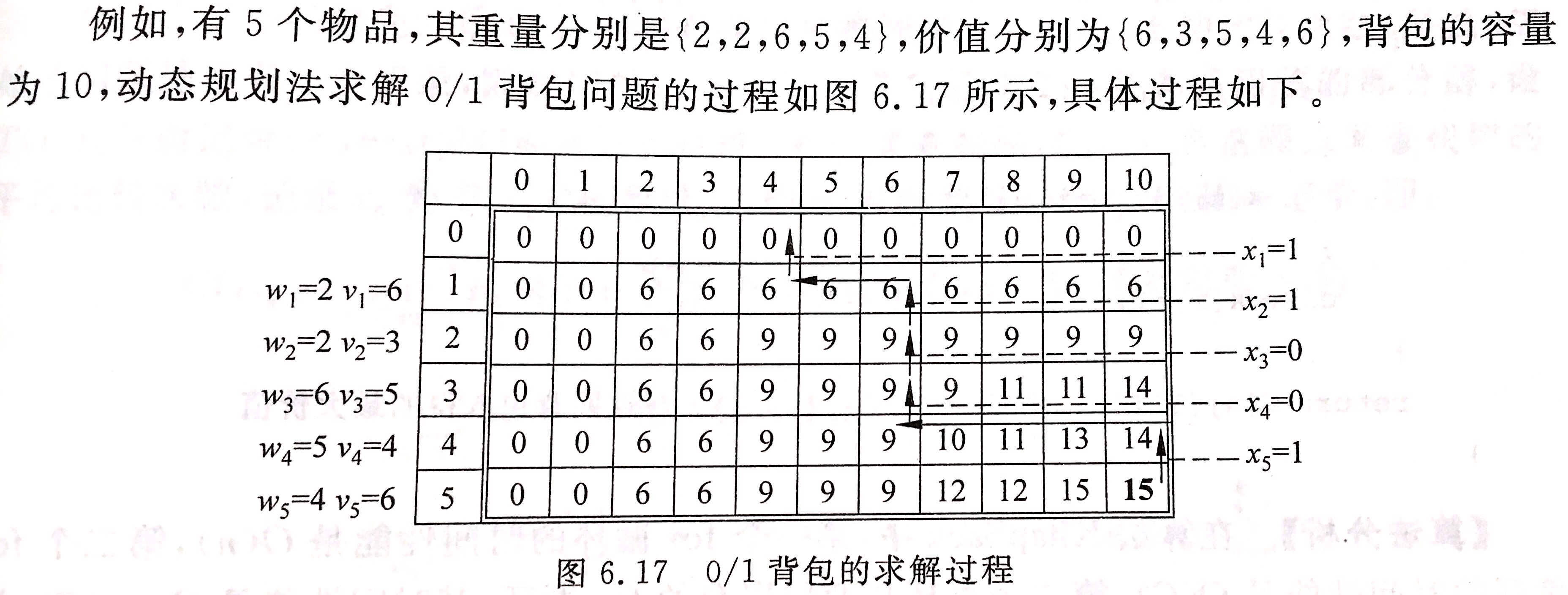
2.动态规划法求解0/1背包问题:
1)基本思想:
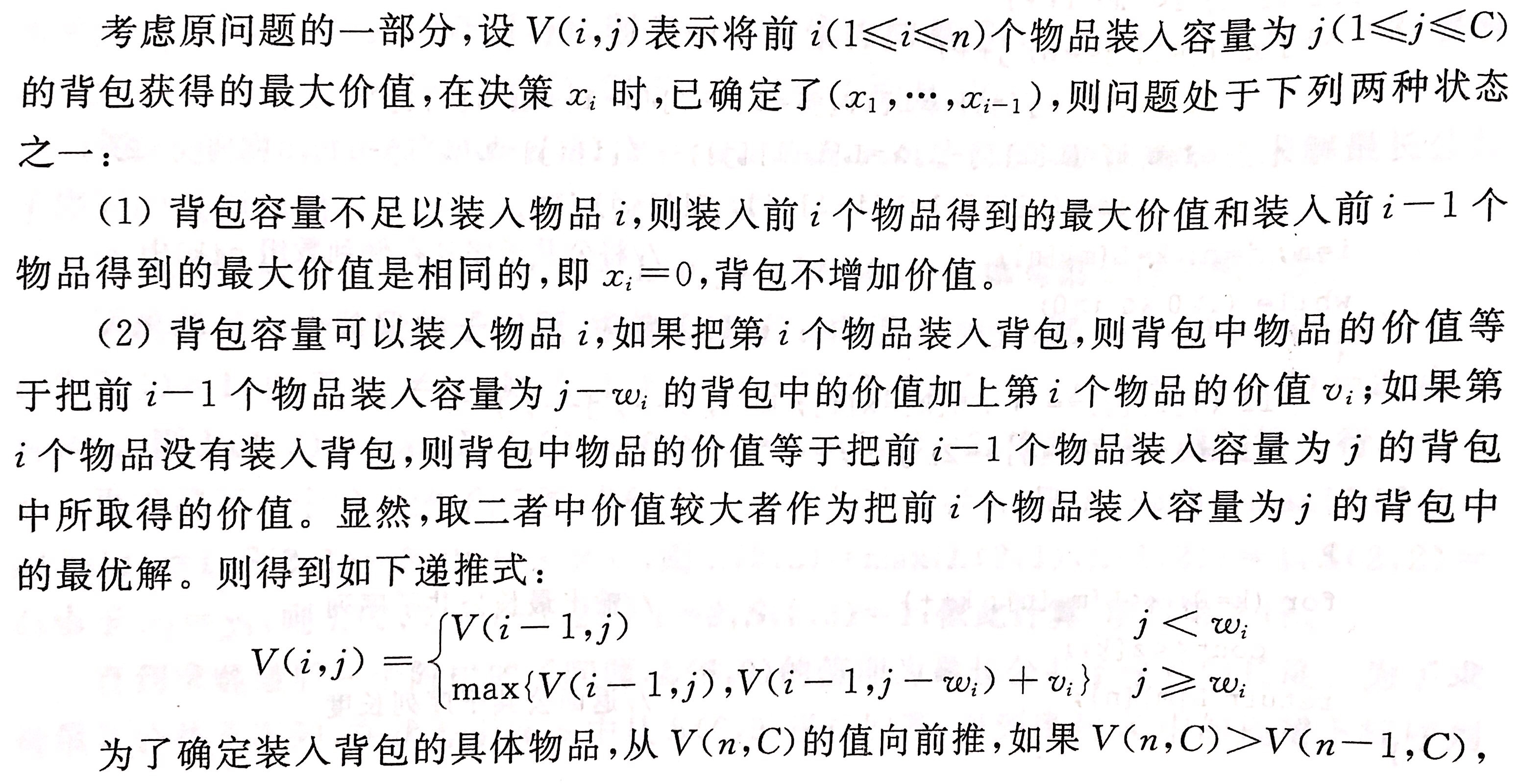
令表示在前个物品中能够装入容量为的背包中的物品的最大值,则可以得到如下动态函数:

2)代码:
#include <iostream> #include<cstdio> #define N 100 #define MAX(a,b) a < b ? b : a using namespace std; struct goods{ int sign;//物品序号 int wight;//物品重量 int value;//物品价值 }; int n,bestValue,cv,cw,C;//物品数量,价值最大,当前价值,当前重量,背包容量 int X[N],cx[N];//最终存储状态,当前存储状态 struct goods goods[N]; int KnapSack(int n,struct goods a[],int C,int x[]){ int V[N][10*N]; for(int i = 0; i <= n; i++)//初始化第0列 V[i][0] = 0; for(int j = 0; j <= C; j++)//初始化第0行 V[0][j] = 0; for(int i = 1; i <= n; i++) for(int j = 1; j <= C; j++) if(j < a[i-1].wight) V[i][j] = V[i-1][j]; else V[i][j] = MAX(V[i-1][j],V[i-1][j-a[i-1].wight] + a[i-1].value); for(int i = n,j = C; i > 0; i--){ if(V[i][j] > V[i-1][j]){ x[i-1] = 1; j = j - a[i-1].wight; } else x[i-1] = 0; } return V[n][C]; } int main() { printf("物品种类n:"); scanf("%d",&n); printf("背包容量C:"); scanf("%d",&C); for(int i = 0; i < n; i++){ printf("物品%d的重量w[%d]及其价值v[%d]:",i+1,i+1,i+1); scanf("%d%d",&goods[i].wight,&goods[i].value); } int sum2 = KnapSack(n,goods,C,X); printf("动态规划法求解0/1背包问题:\nX=["); for(int i = 0; i < n; i++) cout<<X[i]<<" ";//输出所求X[n]矩阵 printf("] 装入总价值%d\n", sum2); return 0; }
3)复杂度分析:
动态规划法求解0/1背包问题的时间复杂度为:n*C
3.回溯法求解0/1背包问题:
1)基本思想:
回溯法:为了避免生成那些不可能产生最佳解的问题状态,要不断地利用限界函数(bounding function)来处死那些实际上不可能产生所需解的活结点,以减少问题的计算量。这种具有限界函数的深度优先生成法称为回溯法。
对于有n种可选物品的0/1背包问题,其解空间由长度为n的0-1向量组成,可用子集数表示。在搜索解空间树时,只要其左儿子结点是一个可行结点,搜索就进入左子树。当右子树中有可能包含最优解时就进入右子树搜索。
2)代码:
#include <iostream> #include<cstdio> #include<string.h> #include<algorithm> using namespace std; #define N 100 struct goods{ int wight;//物品重量 int value;//物品价值 }; int n,bestValue,cv,cw,C;//物品数量,价值最大,当前价值,当前重量,背包容量 int X[N],cx[N];//最终存储状态,当前存储状态 struct goods goods[N]; int BackTrack(int i){ if(i > n-1){ if(bestValue < cv){ for(int k = 0; k < n; k++) X[k] = cx[k];//存储最优路径 bestValue = cv; } return bestValue; } if(cw + goods[i].wight <= C){//进入左子树 cw += goods[i].wight; cv += goods[i].value; cx[i] = 1;//装入背包 BackTrack(i+1); cw -= goods[i].wight; cv -= goods[i].value;//回溯,进入右子树 } cx[i] = 0;//不装入背包 BackTrack(i+1); return bestValue; } bool m(struct goods a, struct goods b){ return (a.value/a.wight) > (b.value/b.wight); } int KnapSack3(int n, struct goods a[], int C,int x[N]){ memset(x,0,sizeof(x)); sort(a,a+n,m);//将各物品按单位重量价值降序排列 BackTrack(0); return bestValue; } int main() { printf("物品种类n:"); scanf("%d",&n); printf("背包容量C:"); scanf("%d",&C); for(int i = 0; i < n; i++){ printf("物品%d的重量w[%d]及其价值v[%d]:",i+1,i+1,i+1); scanf("%d%d",&goods[i].wight,&goods[i].value); } int sum3 = KnapSack3(n,goods,C,X); printf("回溯法求解0/1背包问题:\nX=["); for(int i = 0; i < n; i++) cout << X[i] <<" ";//输出所求X[n]矩阵 printf("] 装入总价值%d\n",sum3); return 0; }
4.分支限界法求解背包问题:
1)基本思想:
分支限界法类似于回溯法,也是在问题的解空间上搜索问题解的算法。一般情况下,分支限界法与回溯法的求解目标不同。回溯法的求解目标是找出解空间中满足约束条件的所有解,而分支限界法的求解目标则是找出满足约束条件的一个解,或是在满足约束条件的解中找出使某一目标函数值达到极大或极小的解,即在某种意义下的最优解。
首先,要对输入数据进行预处理,将各物品依其单位重量价值从大到小进行排列。
在下面描述的优先队列分支限界法中,节点的优先级由已装袋的物品价值加上剩下的最大单位重量价值的物品装满剩余容量的价值和。
算法首先检查当前扩展结点的左儿子结点的可行性。如果该左儿子结点是可行结点,则将它加入到子集树和活结点优先队列中。当前扩展结点的右儿子结点一定是可行结点,仅当右儿子结点满足上界约束时才将它加入子集树和活结点优先队列。当扩展到叶节点时为问题的最优值。
2)代码:
#include<iostream> #include<algorithm> using namespace std; #define N 100 //最多可能物体数 struct goods //物品结构体 { int sign; //物品序号 int w; //物品重量 int p; //物品价值 }a[N]; bool m(goods a,goods b) { return (a.p/a.w)>(b.p/b.w); } int max(int a,int b) { return a<b?b:a; } int n,C,bestP=0,cp=0,cw=0; int X[N],cx[N]; struct KNAPNODE //状态结构体 { bool s1[N]; //当前放入物体 int k; //搜索深度 int b; //价值上界 int w; //物体重量 int p; //物体价值 }; struct HEAP //堆元素结构体 { KNAPNODE *p;//结点数据 int b; //所指结点的上界 }; //交换两个堆元素 void swap(HEAP &a, HEAP&b) { HEAP temp = a; a = b; b = temp; } //堆中元素上移 void mov_up(HEAP H[], int i) { bool done = false; if(i!=1){ while(!done && i!=1){ if(H[i].b>H[i/2].b){ swap(H[i], H[i/2]); }else{ done = true; } i = i/2; } } } //堆中元素下移 void mov_down(HEAP H[], int n, int i) { bool done = false; if((2*i)<=n){ while(!done && ((i = 2*i) <= n)){ if(i+1<=n && H[i+1].b > H[i].b){ i++; } if(H[i/2].b<H[i].b){ swap(H[i/2], H[i]); }else{ done = true; } } } } //往堆中插入结点 void insert(HEAP H[], HEAP x, int &n) { n++; H[n] = x; mov_up(H,n); } //删除堆中结点 void del(HEAP H[], int &n, int i) { HEAP x, y; x = H[i]; y = H[n]; n --; if(i<=n){ H[i] = y; if(y.b>=x.b){ mov_up(H,i); }else{ mov_down(H, n, i); } } } //获得堆顶元素并删除 HEAP del_top(HEAP H[], int&n) { HEAP x = H[1]; del(H, n, 1); return x; } //计算分支节点的上界 void bound( KNAPNODE* node,int M, goods a[], int n) { int i = node->k; float w = node->w; float p = node->p; if(node->w>M){ // 物体重量超过背包载重量 node->b = 0; // 上界置为0 }else{ while((w+a[i].w<=M)&&(i<n)){ w += a[i].w; // 计算背包已装入载重 p += a[i++].p; // 计算背包已装入价值 } if(i<n){ node->b = p + (M - w)*a[i].p/a[i].w; }else{ node -> b = p; } } } //用分支限界法实现0/1背包问题 int KnapSack4(int n,goodsa[],int C, int X[]) { int i, k = 0; // 堆中元素个数的计数器初始化为0 int v; KNAPNODE *xnode, *ynode, *znode; HEAP x, y, z, *heap; heap = new HEAP[n*n]; // 分配堆的存储空间 for( i=0; i<n; i++){ a[i].sign=i; //记录物体的初始编号 } sort(a,a+n,m); // 对物体按照价值重量比排序 xnode = new KNAPNODE; // 建立父亲结点 for( i=0; i<n; i++){ // 初始化结点 xnode->s1[i] = false; } xnode->k = xnode->w = xnode->p = 0; while(xnode->k<n) { ynode = new KNAPNODE; // 建立结点y *ynode = *xnode; //结点x的数据复制到结点y ynode->s1[ynode->k] = true; // 装入第k个物体 ynode->w += a[ynode->k].w; // 背包中物体重量累计 ynode->p += a[ynode->k].p; // 背包中物体价值累计 ynode->k ++; // 搜索深度++ bound(ynode, C, a, n); // 计算结点y的上界 y.b = ynode->b; y.p = ynode; insert(heap, y, k); //结点y按上界的值插入堆中 znode = new KNAPNODE; // 建立结点z *znode = *xnode; //结点x的数据复制到结点z znode->k++; // 搜索深度++ bound(znode, C, a, n); //计算节点z的上界 z.b = znode->b; z.p = znode; insert(heap, z, k); //结点z按上界的值插入堆中 delete xnode; x = del_top(heap, k); //获得堆顶元素作为新的父亲结点 xnode = x.p; } v = xnode->p; for( i=0; i<n; i++){ //取装入背包中物体在排序前的序号 if(xnode->s1[i]){ X[a[i].sign] =1 ; }else{ X[a[i].sign] = 0; } } delete xnode; delete heap; return v; //返回背包中物体的价值 } /*测试以上算法的主函数*/ int main() { goods b[N]; printf("物品种数n: "); scanf("%d",&n); //输入物品种数 printf("背包容量C: "); scanf("%d",&C); //输入背包容量 for (int i=0;i<n;i++) //输入物品i的重量w及其价值v { printf("物品%d的重量w[%d]及其价值v[%d]: ",i+1,i+1,i+1); scanf("%d%d",&a[i].w,&a[i].p); b[i]=a[i]; } int sum4=KnapSack4(n,a,C,X);//调用分支限界法求0/1背包问题 printf("分支限界法求解0/1背包问题:\nX=[ "); for(i=0;i<n;i++) cout<<X[i]<<" ";//输出所求X[n]矩阵 printf("] 装入总价值%d\n",sum4); return 0; }

