
tensorflow(3):神经网络优化(ema,regularization)
1.指数滑动平均 (ema)
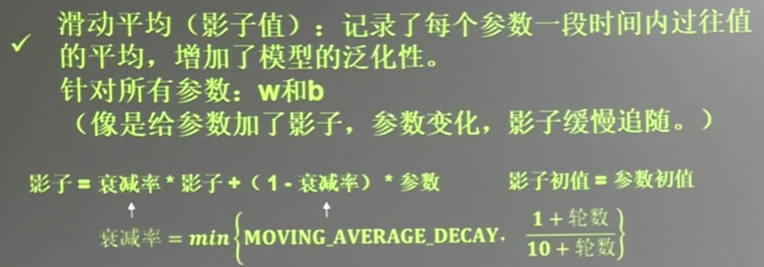

描述滑动平均:
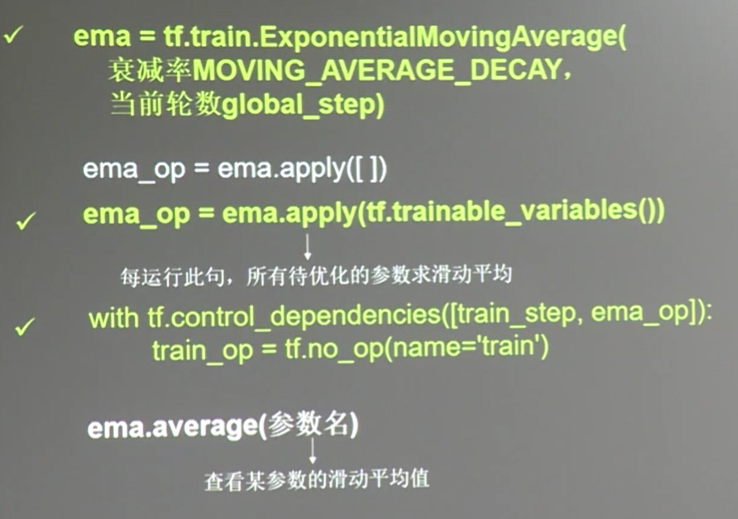
with tf.control_dependencies([train_step,ema_op]) 将计算滑动平均与 训练过程绑在一起运行
train_op=tf.no_op(name='train') 使它们合成一个训练节点
#定义变量一级滑动平均类 #定义一个32位浮点变量,初始值为0.0, 这个代码就是在不断更新w1参数,优化 w1,滑动平均做了一个w1的影子 w1=tf.Variable(0,dtype=tf.float32) #定义num_updates(NN 的迭代次数)初始值为0, global_step不可被优化(训练) 这个额参数不训练 global_step=tf.Variable(0,trainable=False) #设置衰减率0.99 当前轮数global_step MOVING_AVERAGE_DECAY=0.99 ema=tf.train.ExponentialMovingAverage(MOVING_AVERAGE_DECAY,global_step) #ema.apply后面的括号是更新列表,每次运行sess.run(ema_op)时,对更新列表中的元素求滑动平均值, #在实际应用中会使用tf.trainable_variable()自动将所有待训练的参数汇总为列表 #ema_op=ema.apply([w1]) ema_op=ema.apply(tf.trainable_variables()) #查看不同迭代中变量的取值变化 with tf.Session() as sess: init_op=tf.global_variables_initializer() sess.run(init_op) #ema_op=ema.apply([w1])获取w1 的滑动平均值, print(sess.run([w1,ema.average(w1)])) #打印当前参数w1和w1 的滑动平均值 (0,0) sess.run(tf.assign(w1,1)) sess.run(ema_op) print(sess.run([w1,ema.average(w1)])) #(1,0.9) #跟新step w1的值,模拟出100轮迭代后,参数w1 变为10 sess.run(tf.assign(global_step,100)) sess.run(tf.assign(w1,10)) sess.run(ema_op) print(sess.run([w1,ema.average(w1)])) #(10,1.644) #每次sess.run会更新一次w1的滑动平均值 sess.run(ema_op) print(sess.run([w1,ema.average(w1)])) sess.run(ema_op) print(sess.run([w1,ema.average(w1)])) sess.run(ema_op) print(sess.run([w1,ema.average(w1)])) sess.run(ema_op) print(sess.run([w1,ema.average(w1)])) sess.run(ema_op) print(sess.run([w1,ema.average(w1)]))
结果:
[0.0, 0.0]
[1.0, 0.9]
[10.0, 1.6445453]
[10.0, 2.3281732]
[10.0, 2.955868]
[10.0, 3.532206]
[10.0, 4.061389]
[10.0, 4.547275]
w1的移动平均会越来越趋近于w1 ...
2.正则化regularization
有时候模型对训练集的正确率很高, 却对新数据很难做出正确的相应, 这个叫过拟合现象.
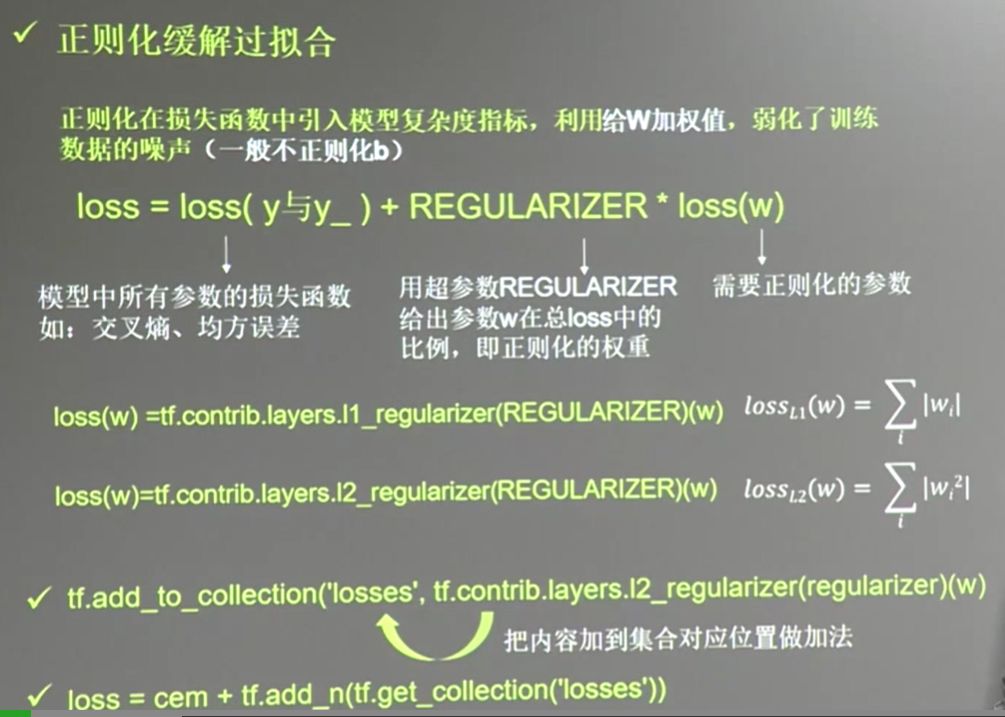
加入噪声后,loss变成了两个部分,前者是以前讲过的普通loss,
后者的loss(w)有两种求法,分别称为L1正则化与 L2正则化
以下举例说明:

代码:
atch_size=30 #建立数据集 seed=2 rdm=np.random.RandomState(seed) X=rdm.randn(300,2) Y_=[int(x0*x0+x1*x1<2) for (x0,x1) in X] Y_c=[['red' if y else 'blue'] for y in Y_] #1则红色,0则蓝色 X=np.vstack(X).reshape(-1,2) #整理为n行2列,按行的顺序来 Y_=np.vstack(Y_).reshape(-1,1)# 整理为n行1列 #print(X) #print(Y_) #print(Y_c) plt.scatter(X[:,0],X[:,1],c=np.squeeze(Y_c))#np.squeeze(Y_c)变成一个list plt.show() #print(np.squeeze(Y_c)) #定义神经网络的输入 输出 参数, 定义前向传播过程 def get_weight(shape,regularizer): #w的shape 和w的权重 w=tf.Variable(tf.random_normal(shape),dtype=tf.float32) tf.add_to_collection('losses',tf.contrib.layers.l2_regularizer(regularizer)(w)) return w def get_bias(shape): #b的长度 b=tf.Variable(tf.constant(0.01,shape=shape)) return b # x=tf.placeholder(tf.float32,shape=(None,2)) y_=tf.placeholder(tf.float32,shape=(None,1)) w1=get_weight([2,11],0.01) b1=get_bias([11]) y1=tf.nn.relu(tf.matmul(x,w1)+b1) #relu 激活函数 w2=get_weight([11,1],0.01) b2=get_bias([1]) y=tf.matmul(y1,w2)+b2 #输出层不过激活函数 #定义损失函数loss loss_mse=tf.reduce_mean(tf.square(y-y_)) loss_total=loss_mse+tf.add_n(tf.get_collection('losses')) #定义反向传播方法, 不含正则化, 要是使用正则化,则 为loss_total train_step=tf.train.AdamOptimizer(0.0001).minimize(loss_mse) with tf.Session() as sess: init_op=tf.global_variables_initializer() sess.run(init_op) steps=40000 for i in range(steps): start=(i*batch_size)%300 end=start+batch_size sess.run(train_step,feed_dict={x:X[start:end],y_:Y_[start:end]}) if i%10000==0: loss_mse_v=sess.run(loss_mse,feed_dict={x:X,y_:Y_}) print('after %d steps,loss is:%f'%(i,loss_mse_v)) xx,yy=np.mgrid[-3:3:0.01,-3:3:0.01] grid=np.c_[xx.ravel(),yy.ravel()] probs=sess.run(y,feed_dict={x:grid}) probs=probs.reshape(xx.shape) #调整成xx的样子 print('w1:\n',sess.run(w1)) print('b1:\n',sess.run(b1)) print('w2:\n',sess.run(w2)) print('b2:\n',sess.run(b2)) plt.scatter(X[:,0],X[:,1],c=np.squeeze(Y_c)) plt.contour(xx,yy,probs,levels=[.5]) #给probs=0.5的值上色 (显示分界线) plt.show() #使用个正则化 train_step=tf.train.AdamOptimizer(0.0001).minimize(loss_total) with tf.Session() as sess: init_op=tf.global_variables_initializer() sess.run(init_op) steps=40000 for i in range(steps): start=(i*batch_size)%300 end=start+batch_size sess.run(train_step,feed_dict={x:X[start:end],y_:Y_[start:end]}) if i%10000==0: loss_v=sess.run(loss_total,feed_dict={x:X,y_:Y_}) print('after %d steps,loss is:%f'%(i,loss_v)) xx,yy=np.mgrid[-3:3:0.01,-3:3:0.01] grid=np.c_[xx.ravel(),yy.ravel()] probs=sess.run(y,feed_dict={x:grid}) probs=probs.reshape(xx.shape) #调整成xx的样子 print('w1:\n',sess.run(w1)) print('b1:\n',sess.run(b1)) print('w2:\n',sess.run(w2)) print('b2:\n',sess.run(b2)) plt.scatter(X[:,0],X[:,1],c=np.squeeze(Y_c)) plt.contour(xx,yy,probs,levels=[.5]) #给probs=0.5的值上色 plt.show()
结果显示:

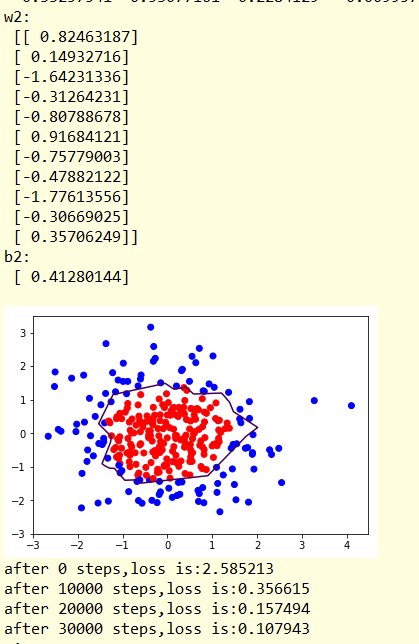

显然 经过正则化,分割线更加平滑,数据集中的噪声对模型的影响更小,
----END---- HAVE A GOOD ONE!
以上为本人课余自学工具书/blog的笔记整理, 常有更新, 非100%原创!且读且学习。

