


俯仰角/偏航角的转化
作者:桂。
时间:2017-10-20 10:29:52
链接:http://www.cnblogs.com/xingshansi/p/7698237.html
前言
主要记录坐标系的转化。
一、坐标转化
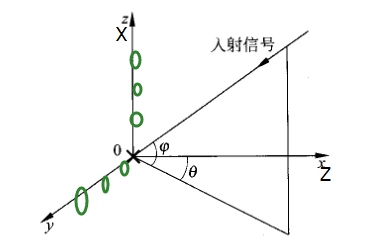
对于坐标系:
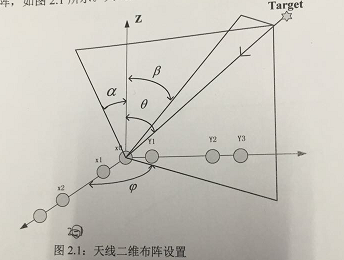
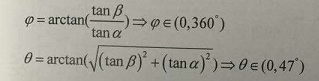
设方位角为φ,俯仰角为theta,仰角β与偏航角α,对应换算关系:

从而解算方位、俯仰范围:
对于平面阵相位:

二、分辨率
以两个入射信号为例,角度分辨力指的是∠AOB:

例如计算两个信号的实际夹角:a*b = |a||b|cos(theta):
若阵元在XOZ平面:
对应角度分辨率计算:
%圆阵程序 phi = [10 10]/180*pi; %phi delta = 5.1; theta0 = 40; theta = [theta0 theta0+delta]/180*pi; p1 = [cos(theta(1))*cos(phi(1)) sin(theta(1))*cos(phi(1)) sin(phi(1))]; p2 = [cos(theta(2))*cos(phi(2)) sin(theta(2))*cos(phi(2)) sin(phi(2))]; acosd(p1*p2')%实际间隔
按第一部分的布局:
Theta1 = [5 3]/180*pi; %参数1:方位 参数2:俯仰 Theta2 = [125 3]/180*pi; p1 = [sin(theta1(2))*cos(theta1(1)) sin(theta1(2))*sin(theta1(1)) cos(theta1(2))]; p2 = [sin(theta2(2))*cos(theta2(1)) sin(theta2(2))*sin(theta2(1)) cos(theta2(2))]; acosd(p1*p2')

