

自适应滤波:最小均方误差滤波器(LMS、NLMS)
作者:桂。
时间:2017-04-02 08:08:31
链接:http://www.cnblogs.com/xingshansi/p/6658203.html
声明:欢迎被转载,不过记得注明出处哦~

【读书笔记08】
前言
西蒙.赫金的《自适应滤波器原理》第四版第五、六章:最小均方自适应滤波器(LMS,Least Mean Square)以及归一化最小均方自适应滤波器(NLMS,Normalized Least Mean Square)。全文包括:
1)LMS与维纳滤波器(Wiener Filter)的区别;
2)LMS原理及推导;
3)NLMS推导;
4)应用实例;
内容为自己的读书记录,其中错误之处,还请各位帮忙指出!
一、LMS与维纳滤波器(Wiener Filter)的区别
- 这里介绍的LMS/NLMS,通常逐点处理,对应思路是:随机梯度下降;
- 对于Wiener Filter,给定准则函数J,随机/批量梯度都可以得出最优解;
- LMS虽然基于梯度下降,但准则仅仅是统计意义且通常引入误差,可以定义为J0,简而言之J通常不等于J_0,得出的最优解w_o自然也通常不等于维纳最优解;
- 分析LMS通常会分析稳定性,稳定性是基于Wiener解,之前已给出分析。但LMS是Wiener解的近似,所以:迭代步长的稳定性,严格适用于Wiener解,对于LMS只是一种近似参考,并没有充分的理论依据。
下文的分析仍然随机梯度下降的思路进行。
二、LMS原理及推导
LMS是时间换空间的应用,如果迭代步长过大,仍然有不收敛的问题;如果迭代步长过小,对于不平稳信号,还没有实现寻优就又引入了新的误差,屋漏偏逢连夜雨!所以LMS系统是脆弱的,信号尽量平稳、哪怕短时平稳也凑合呢。
给出框图:
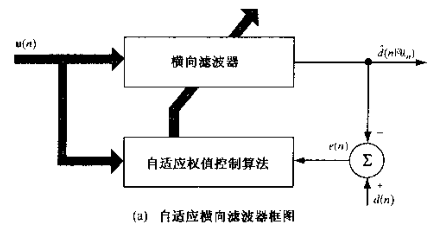
关于随机梯度下降,可以参考之前的文章。这里直接给出定义式:
![]()
利用梯度下降:
- \nabla J = {\bf{x}}{\left( {{{\bf{w}}^T}{\bf{x}} - {d}} \right)^T}
给出LMS算法步骤:
1)给定\bf{w}(0),且1<\mu<1/\lambda_{max};
2)计算输出值:y\left( k \right) = {\bf{w}}{\left( k \right)^T}{\bf{x}}\left( k \right);
3)计算估计误差:e\left( k \right) = d\left( k \right) - y\left( k \right);
4)权重更新:{\bf{w}}\left( {k + 1} \right) = {\bf{w}}\left( k \right) + \mu e\left( k \right){\bf{x}}\left( k \right)
三、NLMS推导
看到Normalized,与之联系的通常是约束条件,看到约束不免想起拉格朗日乘子。思路有了,现在开始分析:
假设{\bf{w}}\left( k \right) \Rightarrow {\bf{w}}\left( {k + 1} \right)得到最优权重,即:
d\left( k \right) = {\bf{w}}\left( {k + 1} \right){\bf{x}}\left( k \right)
我们希望在得到期望权重的附近,迭代不要过大以免错过最优值:
![]()
写出准则函数:
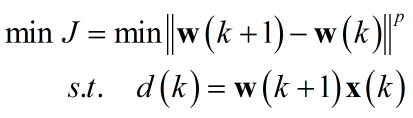
利用之前文章提到的拉格朗日乘子法:
![]()
这里仅仅分析基于欧式距离p = 2的情形,其它范数类似。求解得出:
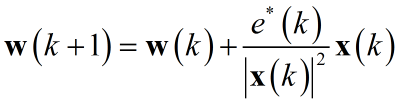
通常为了防止分母为零迭代方程需要修正,而修正后步长存在偏差,故添加调节因子\mu:

给出NLMS算法步骤:
1)给定\bf{w}(0);
2)计算输出值:y\left( k \right) = {\bf{w}}{\left( k \right)^T}{\bf{x}}\left( k \right);
3)计算估计误差:e\left( k \right) = d\left( k \right) - y\left( k \right);
4)权重更新:{\bf{w}}\left( {k + 1} \right) = {\bf{w}}\left( k \right) + \frac{\mu }{{\alpha + {{\left| {{\bf{x}}\left( k \right)} \right|}^2}}}{\bf{x}}\left( k \right){e^*}\left( k \right)
四、应用实例
A-自适应噪声滤波
这个场景可以简化为:一个房间两个麦克风,一个放在远处采集房间噪声,一个放在说话人附近采集带噪语音,认为两个音频文件的噪声相似。
这里噪声直接用白噪声,对应实际场景可以认为是采集的噪声数据,给出主要代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 | [s, fs, bits] = wavread(filename); s=s-mean(s); s=s/max(abs(s)); N=length(s); time=(0:N-1)/fs; %%生成带噪信号clean=s';ref_noise=0.1*randn(1,length(s));mixed = clean+ref_noise%NLMSmu=0.05;M=32;espon=1e-4;% [en,wn,yn]=lmsFunc(mu,M,ref_noise,mixed);%[en,wn,yn]=nlmsFunc(mu,M,ref_noise,mixed,espon); |
LMS代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 | function [e,w,ee]=lmsFunc(mu,M,u,d)% Normalized LMS% Call:% [e,w]=nlms(mu,M,u,d,a);%% Input arguments:% mu = step size, dim 1x1% M = filter length, dim 1x1% u = input signal, dim Nx1% d = desired signal, dim Nx1% a = constant, dim 1x1%% Output arguments:% e = estimation error, dim Nx1% w = final filter coefficients, dim Mx1%intial value 0w=zeros(M,1); %This is a vertical column%input signal lengthN=length(u);%make sure that u and d are colon vectorsu=u(:);d=d(:);%NLMSee=zeros(1,N);for n=M:N %Start at M (Filter Length) and Loop to N (Length of Sample) uvec=u(n:-1:n-M+1); %Array, start at n, decrement to n-m+1 e(n)=d(n)-w'*uvec; w=w+2*mu*uvec*e(n); % y(n) = w'*uvec; %In ALE, this will be the narrowband noise.end |
NLMS代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 | function [e,w,ee]=nlmsFunc(mu,M,u,d,a)% Normalized LMS% Call:% [e,w]=nlms(mu,M,u,d,a);%% Input arguments:% mu = step size, dim 1x1% M = filter length, dim 1x1% u = input signal, dim Nx1% d = desired signal, dim Nx1% a = constant, dim 1x1%% Output arguments:% e = estimation error, dim Nx1% w = final filter coefficients, dim Mx1%intial value 0w=zeros(M,1); %This is a vertical column%input signal lengthN=length(u);%make sure that u and d are colon vectorsu=u(:);d=d(:);%NLMSee=zeros(1,N);for n=M:N %Start at M (Filter Length) and Loop to N (Length of Sample) uvec=u(n:-1:n-M+1); %Array, start at n, decrement to n-m+1 e(n)=d(n)-w'*uvec; w=w+mu/(a+uvec'*uvec)*uvec*e(n); % y(n) = w'*uvec; %In ALE, this will be the narrowband noise.end |
对应结果图:
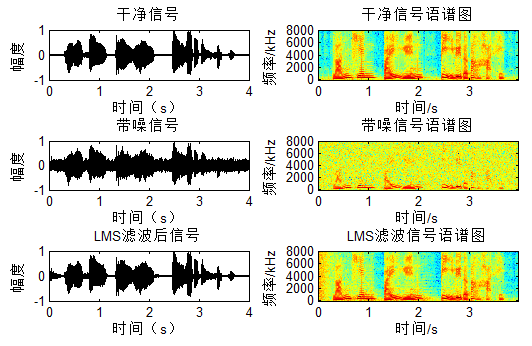
可以看出LMS/NLMS在最开始都有一个自适应的过程。
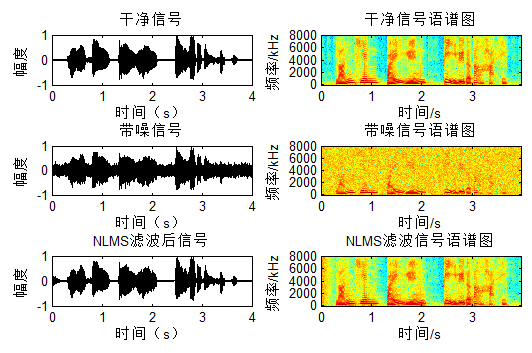
NLMS基于信号x的能量实现变步长,信号大步长小,信号小则步长大:目标信号明显,则迭代细致,不明显,则一带而过,呵呵,跟平时看书还挺像,聪明的孩子。
再来看一组信号:
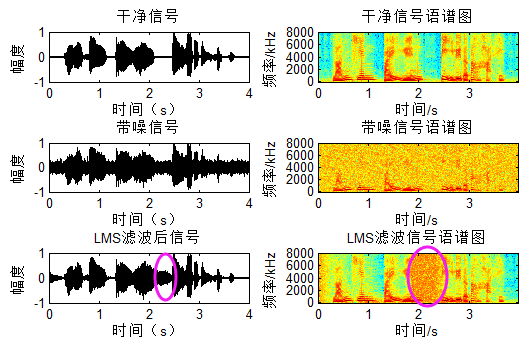
这里在中间令噪声突变,可以看到滤波器又需要重新自适应,因此对于短时平稳LMS勉强使用,如果不断变呢?非平稳LMS自然无效了,这个时候就需要Kalman Filter来搭把手。
B-工频噪声滤波
现在有一个音频信号,分析频谱:
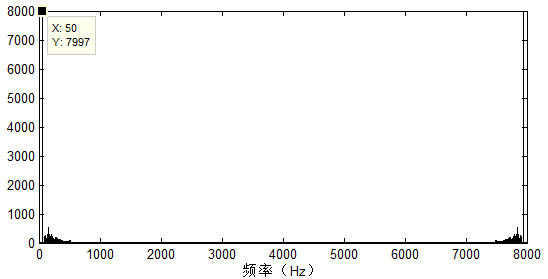
可以看到信号带有明显的50Hz噪声,我们知道50Hz的正弦与余弦可以组合成任意相位的50Hz频率信号,基于这个思路,进行自适应滤波:
给出主要的代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 | x1=cos(2*pi*50*time); x2=sin(2*pi*50*time);w1=0.1; w2=0.1;e=zeros(1, N); y=zeros(1, N);mu=0.05; for i=1: N y(i)=w1 * x1(i)+ w2 * x2(i); e(i) =x(i)-y(i); w1=w1+mu * e(i) * x1(i); w2=w2+mu * e(i) * x2(i);end |
结果图可以看出,工频50Hz滤除:

基于LMS的应用还有很多,不一一说啦。
参考:
- Simon Haykin 《Adaptive Filter Theory Fourth Edition》.
- 宋知用:《MATLAB在语音信号分析和合成中的应用》.


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· Linux系列:如何调试 malloc 的底层源码
· AI与.NET技术实操系列:基于图像分类模型对图像进行分类
· go语言实现终端里的倒计时
· 如何编写易于单元测试的代码
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· Apifox不支持离线,Apipost可以!
· 历时 8 年,我冲上开源榜前 8 了!
· 零经验选手,Compose 一天开发一款小游戏!
· Trae 开发工具与使用技巧
· 通过 API 将Deepseek响应流式内容输出到前端