
自适应滤波:维纳滤波器——FIR及IIR设计
作者:桂。
时间:2017-03-23 06:28:45
链接:http://www.cnblogs.com/xingshansi/p/6603263.html

【读书笔记02】
前言
仍然是西蒙.赫金的《自适应滤波器原理》第四版,距离上次看这本书已经过去半个月,要抓点紧了。本文主要包括:
1)何为维纳滤波器(Wiener Filter);
2)Wiener滤波器的推导;
3)应用实例;
4)Wiener变体;
内容为自己的学习总结,内容多有参考他人,最后一并给出链接。
一、维纳滤波器简介
A-基本概念
对于滤波器的具体实现,都依赖两个选择:
1)Filter的impulse选择(FIR / IIR)
2)统计优化准则的选择
维纳滤波器:由数学家维纳(Rorbert Wiener)提出的一种以最小平方(统计准则)为最优准则的线性滤波器。何为线性滤波器?文中图:

B-几个问题
在具体讨论之前,先来说说自己看的时候,想到的几个问题:
问题1:维纳滤波器与自适应滤波是什么关系,与LMS呢?
个人观点:常用的hamming、taylor都是固定的滤波器,滤波器参数需要根据信号进行计算调整的,这一类滤波器都是自适应滤波器,跟自己有关嘛,自适应理所当然,维纳滤波器是利用统计参数,实际应用中可能无法得到,需要借助迭代实现,这样就成了一个新框架→自适应滤波器。参数估计呢可以利用梯度下降法迭代逼近,例如常说的LMS就是迭代逼近的一种方式,LMS本身不同于weiner-filter,但迭代结果可以作为wiener-filter的近似。
问题2:维纳滤波器是有限长(FIR-Finite Impulse Response)还是无限长滤波器(IIR-Infinite Impulse Response)?
个人观点:维纳滤波器是大的理论框架,而FIR/IIR只是实现理论的不同途径,故二者均可,下文会一一介绍。
问题3:基于维纳滤波器这个理论框架的应用有哪些?
个人观点:1)自适应是一种解决工程问题的途径,故很多自适应滤波本质都是维纳滤波(不是全部);2)MVDR谱估计(Minimum variance distortionless response)、广义旁瓣相消GSC(Generalized Sidelobe Canceller )等都是维纳框架下的应用。
问题4:卡尔曼滤波(Kalman)是维纳滤波的一种吗?
个人观点:应该不是,维纳滤波器是线性滤波器,而卡尔曼滤波器据说是非线性,具体区别等看到卡尔曼再回头总结。
二、维纳滤波器理论分析
A-有限长维纳滤波(FIR)
1-基本定义
下图是使用M抽头FIR滤波器的结构图:
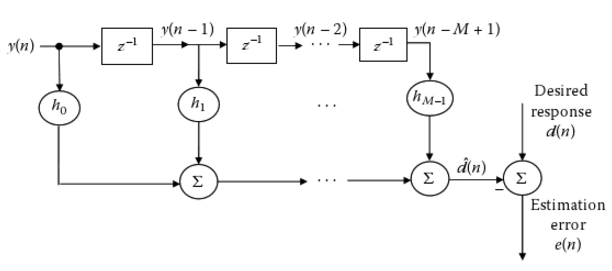
输出为:
$\hat d\left( n \right) = \sum\limits_{k = 0}^{M - 1} {{h_k}y\left( {n - k} \right)} $
其中$h_k$为FIR滤波器系数,M为系数个数。
以下推导基于宽平稳假设,首先计算估计误差:
$e\left( n \right) = d\left( n \right) - \hat d\left( n \right) = d\left( n \right) - {{\bf{h}}^T}{\bf{y}}$
其中${{\bf{h}}^T} = \left[ {{h_0},{h_1},{h_2},...,{h_{M - 1}}} \right]$,${{\bf{y}}^T} = \left[ {y\left( n \right),y\left( {n - 1} \right),y\left( {n - 2} \right),...,y\left( {n - M + 1} \right)} \right]$是包括过去M个样本的输入向量。
Wiener Filter基于最小均方误差准则,给出均方误差定义:
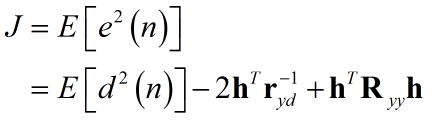
其中,${\bf{r}}_{yd}^{ - 1} = E\left[ {{\bf{y}}d\left( n \right)} \right]$为输入信号与期望信号的互相关。
2-维纳滤波器求解
最小化估计误差,对其中某个抽头系数求偏导:
$\frac{{\partial J}}{{\partial {h_k}}} = 0\;\;\; \Rightarrow \;\;\; - 2E\left[ {e\left( n \right)y\left( {n - k} \right)} \right] = 0$
这就是正交定理(Orthogonality Principle):估计误差$e(n)$需要正交与输入信号$y(n)$。这也容易理解,在输入信号$y(n)$张成的子空间中,更加高维的信息无法被表达,故成了误差。如$(x_1,y_1,z_1)$用$x 、 y$两个单位向量表达,最小均方误差时$z_1$就成了估计误差。
不失一般性,将偏导写成向量/矩阵形式:
$\frac{{\partial J}}{{\partial {\bf{h}}}} = 0\;\;\; \Rightarrow \;\;\; - 2{\bf{r}}_{yd}^{ - 1} + 2{{\bf{h}}^T}{{\bf{R}}_{yy}} = 0$
上式${{\bf{h}}^T}{{\bf{R}}_{yy}} = {\bf{r}}_{yd}^{ - 1}$就是Wiener Hopf方程。
得到Wiener Filter最优解${{{\bf{h}}_{opt}}}$:
${{\bf{h}}_{opt}}{\rm{ = }}{\bf{R}}_{_{yy}}^{{\rm{ - 1}}}{\bf{r}}_{yd}^{ - 1}$
上式就是Wiener-Hopf的解,也就是对应Wiener Filter的解。求解需要矩阵求逆,又相关矩阵为对称且为Toeplitz形式,故可借助数学手段对R高效求逆——Levinson-Durbin算法。
因为在时域分析,此时FIR的解也叫时域维纳滤波器。
B-无限长维纳滤波(IIR)
1-基本定义
滤波器为无限长时,$\hat d\left( n \right) = \sum\limits_{k = 0}^{M - 1} {{h_k}y\left( {n - k} \right)}$改写为:
$\hat d\left( n \right) = \sum\limits_{k = - \infty }^\infty {{h_k}y\left( {n - k} \right)} = h\left( n \right) * y\left( n \right)$
$*$表示卷积。易证:时域有限长对应频域无限长,时域无限长对应频域有限长,因此对于IIR情形,更希望在频域进行分析。
2-维纳滤波器求解
计算均方误差:

其中${E\left( {{\omega _k}} \right)}$为$e\left( n \right)$的频域变换,${P_{yd}}\left( {{\omega _k}} \right) = E\left[ {Y\left( {{\omega _k}} \right){D^*}\left( {{\omega _k}} \right)} \right]$, ${P_{yy}}\left( {{\omega _k}} \right) = E\left[ {{{\left| {Y\left( {{\omega _k}} \right)} \right|}^2}} \right]$。
针对J求解复导数:
$\frac{{\partial J}}{{\partial H\left( {{\omega _k}} \right)}} = 0\;\;\; \Rightarrow \;\;\;{H^*}\left( {{\omega _k}} \right){P_{yy}}\left( {{\omega _k}} \right) - {P_{yd}}\left( {{\omega _k}} \right) = 0$
得到频域维纳滤波最优解:
${H_{opt}}\left( {{\omega _k}} \right) = \frac{{{P_{dy}}\left( {{\omega _k}} \right)}}{{{P_{yy}}\left( {{\omega _k}} \right)}}$
因为在频域分析,此时IIR的解也叫频域维纳滤波器。
三、应用实例
已知:
含有噪声的正弦波:$y(n) = s(n) + w(n) = \sin (2\pi fn + \theta ) + w(n)$.
其中$f = 0.2$为归一化频率[-1/2, 1/2],$\theta$为正弦波相位,服从[0,2$\pi$]的均匀分布,$w(n)$为具有零均值和方差$\sigma^2 = 2$的高斯白噪声。
求:
时域以及频域维纳滤波器。假设滤波器为时域滤波器时$M=2$.
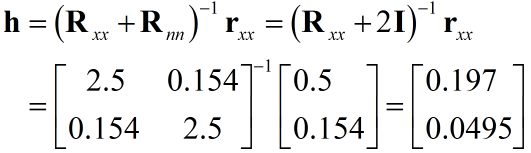
A-对于时域维纳滤波器:
首先求解相关矩阵:
$x(n)$为广义平稳随机过程,可以计算其自相关函数:
${r_{xx}}\left( m \right) = \cos (2\pi fn)$
利用上面推导的Wiener-Hopf最优解公式:
当然也可以求解准则函数$J$,求极值点:

B-对于频域维纳滤波器:
白噪声与信号不相关,直接调用上文推导的公式:
$H\left( {{\omega _k}} \right) = \frac{{{P_{xy}}\left( {{\omega _k}} \right)}}{{{P_{yy}}\left( {{\omega _k}} \right)}} = \frac{{{P_{xx}}\left( {{\omega _k}} \right)}}{{{P_{xx}}\left( {{\omega _k}} \right) + {P_{nn}}\left( {{\omega _k}} \right)}} = \frac{{{P_{xx}}\left( {{\omega _k}} \right)}}{{{P_{xx}}\left( {{\omega _k}} \right) + 2}}$
时域相关函数与频域功率谱互为傅里叶变换,而时域相关函数在求时域维纳滤波时已写出,得出功率谱公式:

当$L -> \infty $,将$P_{xx}$代入上式,即使频域维纳滤波器的解。
C-闲话时域、频域维纳滤波器
时域求解维纳滤波器,但时域对应的都有频域的变换结果,如$L = 2$的频域解就是时域维纳解的傅里叶变换。画出$L$不同取值对应的频域幅度响应:

可以观察到:$L$趋近∞时,频域响应接近$\sigma(.)$冲激响应,这与理论:相关函数为时域余弦对应频域冲激响应是一致的。
这个例子只是理想情况,理一理求解的思路,事实上认为信号的自相关为已知,这是不符合实际的。实际应用中如何近似求解呢?给出一个简单例子。
D-基于频域维纳滤波的语音增强
还是利用上面的模型:
$y(n) = x(n) + w(n)$
这里$y(n)$是麦克风接收的带噪语音,$x(n)$是干净语音信号,$w(n)$为白噪声。显然相关函数我们无法得知。
利用一种近似的处理思路:利用前面几个分帧不带语音,估计噪声,从而得到噪声的功率谱近似,利用带噪语音功率减去噪声功率,得到
$H\left( {{\omega _k}} \right) = \frac{{{P_{xy}}\left( {{\omega _k}} \right)}}{{{P_{yy}}\left( {{\omega _k}} \right)}} = \frac{{{P_{xx}}\left( {{\omega _k}} \right)}}{{{P_{xx}}\left( {{\omega _k}} \right) + {P_{nn}}\left( {{\omega _k}} \right)}} = \frac{{{P_{yy}}\left( {{\omega _k}} \right) - {P_{nn}}\left( {{\omega _k}} \right)}}{{{P_{yy}}\left( {{\omega _k}} \right)}}$
利用估计出的维纳滤波器,即可实现信号的频域滤波。这里只是想到的一个实际例子,至于参数估计、迭代方式则是百花齐放了。
附上主要代码:
nw = 512; ni = 64;
NIS = 100;
Y = fft(enframe(y,hamming(nw),ni)');
Yab = abs(Y);
Nest = mean(Yab(:,1:NIS),2);
Yest = zeros(size(Y));
for i = 1:size(Y,2)
Yest(:,i) = Yab(:,i).*((Yab(:,i)-Nest)./Yab(:,i));
end
Ye = Yest.*exp(1j*angle(Y));
result = zeros(1,length(y));%estimation
for i =1:size(Y,2);
pos = ((i-1)*ni+1):((i-1)*ni+nw);
result(pos) = result(pos)+real(ifft(Ye(:,i))).';
end
result = result/max(abs(result));
上面思路处理结果:
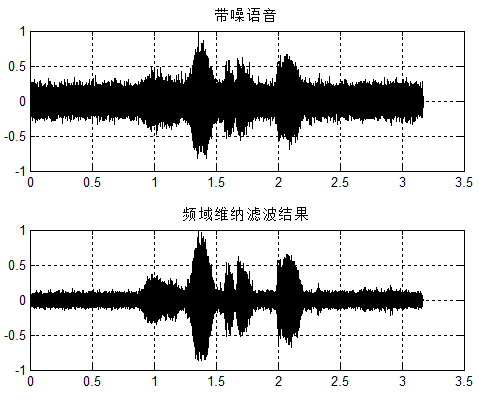
可以看出维纳降噪多少还是有些效果的,$H\left( {{\omega _k}} \right) = \frac{{{P_{xy}}\left( {{\omega _k}} \right)}}{{{P_{yy}}\left( {{\omega _k}} \right)}} = \frac{{{P_{xx}}\left( {{\omega _k}} \right)}}{{{P_{xx}}\left( {{\omega _k}} \right) + {P_{nn}}\left( {{\omega _k}} \right)}} = \frac{1}{{1 + 1/SNR}}$可以看出SNR越小,维纳滤波器衰减越大。
四、Wiener Filter变体
A-平方根维纳滤波
使用维纳滤波器的平方根,则滤波器在频域的滤波结果为:
$\hat X\left( {{\omega _k}} \right) = \sqrt {H\left( {{\omega _k}} \right)} Y\left( {{\omega _k}} \right)$
仍然基于噪声与信号不相关的假设,分析滤波后信号的功率谱:
$E{\left| {\hat X\left( {{\omega _k}} \right)} \right|^2} = {P_{\hat x\hat x}} = H\left( {{\omega _k}} \right)E{\left| {Y\left( {{\omega _k}} \right)} \right|^2} = H\left( {{\omega _k}} \right){P_{yy}}\left( {{\omega _k}} \right) = {P_{xx}}\left( {{\omega _k}} \right)$
可见采用平方根维纳滤波,滤波器输出信号的功率谱与纯净信号的功率谱相等。
B-参变维纳滤波器
以频域Wiener Filter为例:
$H\left( {{\omega _k}} \right) = \frac{{{P_{xy}}\left( {{\omega _k}} \right)}}{{{P_{yy}}\left( {{\omega _k}} \right)}} = \frac{{{P_{xx}}\left( {{\omega _k}} \right)}}{{{P_{xx}}\left( {{\omega _k}} \right) + {P_{nn}}\left( {{\omega _k}} \right)}}$
很自然地,可以将其扩展为广义Wiener Filter形式:
$H\left( {{\omega _k}} \right) = {\left( {\frac{{{P_{xx}}\left( {{\omega _k}} \right)}}{{{P_{xx}}\left( {{\omega _k}} \right) + \alpha {P_{nn}}\left( {{\omega _k}} \right)}}} \right)^\beta }$
这样通过调节($\alpha$,$\beta $ )即可对滤波器进行微调。
参考:
Philipos C.Loizou《speech enhancement theory and practice》.
Simon Haykin 《Adaptive Filter Theory Fourth Edition》.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号