[学习笔记]设计模式之Command
为方便读者,本文已添加至索引:
写在前面
在上篇Chain of Responsibility(职责链)模式笔记中,我们学习了一种行为型设计模式。今天,我们继续这一主题,来学习下Command(命令)模式。可以看到职责链模式是对处理请求的对象(职能者)进行了建模,而Command模式的最大不同之处就在于,它是对请求本身进行建模的。这一点从它的名字就可以看出。所以它又有别名叫:Action(动作)、Transaction(事物)模式。
老规矩,我们首先直观地去理解什么是命令模式。日常工作中,我们常常会接受到一些“任务”,这些任务往往伴随着具体要求,并对应着特定的执行人。比如说我们做一个项目,我负责其中一个Feature。那么之后,上头提出的关于这个Feature的任何修改的“command”,都会让我去执行,因为我拥有开发这个Feature所必需的相关信息。
实现这一模型的关键点就在于Command的抽象类,它定义了一个执行操作的接口,比如说execute()操作。具体的一个Command子类将接收者作为它的一个实例变量保存,并实现execute()操作,指定接收者行动起来。我们将在示例部分进行更深入地实例讲解,那么在此之前我们可以了解下它的基本要点:
要点梳理
- 目的分类
- 对象行为型模式
- 范围准则
- 对象(该模式处理对象间的关系,这些关系在运行时刻是可以变化的,更具动态性)
- 主要功能
- 将一个请求封装为一个对象,从而使你可用不同的请求对客户进行参数化;对请求排队或记录请求日志,以及支持可撤消的操作
- 适用情况
- 当我们需要抽象出待执行的动作以参数化某对象时。
- 在不同的时刻指定、排列和执行请求。
- 需要支持取消操作。
- 需要支持修改日志,这样当系统崩溃时,这些修改可以被重做一遍。
- 用构建在原语操作上的高层操作构造一个系统。
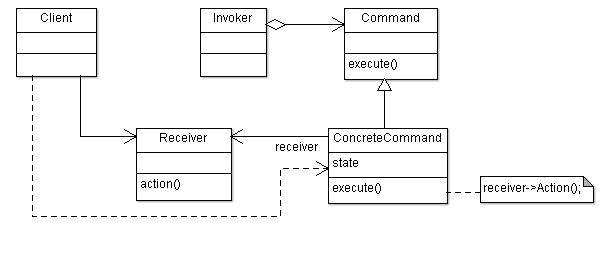
- 参与部分
- Command:声明执行操作的接口
- ConcreteCommand:将一个接收者对象绑定于一个动作;调用接收者相应的操作,以实现execute
- Client:创建一个具体命令对象并设定它的接收者
- Invoke:要求该命令执行这个请求
- Receiver:知道如何实施与执行一个请求相关的操作。任何类都可能作为一个接收者
- 协作过程
- Client创建一个ConcreteCommand对象并指定它的Reciever对象
- 某个Invoker对象存储ConcreteCommand对象
- 该Invoker通过调用Command对象的execute操作来提交一个请求。若该命令是可以取消的,那么ConcreteCommand就在执行execute之前存储当前状态以用于撤销
- ConcreteCommand对象对调用它的Receiver的一些操作执行该请求
- UML图
示例分析 - 魔法小人偶的驱动器
让我们回顾下女巫格琳达的私人订制魔法小人偶吧(详见Composite模式笔记)。它通过某种神秘的传感器作为Input装置,接收人们下达的命令,然后执行。为了简单起见,我们今天举一个具体的“武斗人偶”的例子。这种人偶俨然一位空手格斗大师,为了灵活地展现武斗技巧,它分别有对应于手臂和腿部的驱动装置(ArmDrive & LegDrive),人们可以给它下达诸如“挥击”(Punch)、“飞踢”(FlyingKick) 等命令。为了增强人偶功能的扩展性,我们当然希望它日后可以执行更多更多的命令。Command设计模式的引入帮我们很好地解决了需求。它使得调用操作的对象与知道如何实现该操作的对象解耦。我们的例子中,人偶的传感器就是调用操作的对象,而各种驱动器则是实现具体操作的对象,Command模式使得传感器不需要知道任何驱动器的信息,这非常有助于我们日后开发更多的驱动装置。
首先来看最重要的Command类:
1 // ... Direction definitions ... 2 #define NONE 0 3 #define D_SOUTH 1 4 #define D_NORTH 2 5 #define D_WEST 3 6 #define D_EAST 4 7 8 // ... Abstract Command class ... 9 class Command { 10 public: 11 virtual ~Command(); 12 virtual void execute() = 0; 13 protected: 14 Command(); 15 };
接下来是PunchCommand,它会令ArmDrive对象朝用户指定的方向来狠狠重击。注意,PunchCommand的构造器需要一个ArmDrive对象作为参数。askDirection是提示用户告诉它具体的方向。
1 // Punch ! 2 class PunchCommand : public Command { 3 public: 4 PunchCommand(ArmDrive*); 5 6 virtual void execute(); 7 protected: 8 virtual int askDirection(); 9 private: 10 ArmDrive* _drive; 11 }; 12 13 PunchCommand::PunchCommand(ArmDrive* a) { 14 _drive = a; 15 } 16 17 void PunchCommand::execute() { 18 int direction = askDirection(); 19 20 if (direction) { 21 _drive->punch(direction); 22 } 23 }
同理我们有KickCommand需要一个LegDrive对象作为其接收者。其中askHeight是询问用户需要踢击的高度,必要的时候它得跳起来。
1 // Kick ! 2 class KickCommand : public Command { 3 public: 4 KickCommand(LegDrive*); 5 6 virtual void execute(); 7 protected: 8 virtual int askHeight(); 9 virtual int askDirection(); 10 private: 11 LegDrive* _drive; 12 }; 13 14 KickCommand::PunchCommand(LegDrive* l) { 15 _drive = l; 16 } 17 18 void KickCommand::execute() { 19 int direction = askDirection(); 20 int height = askHeight(); 21 22 if (direction && height > 0) { 23 _drive->kick(direction, height); 24 } 25 }
这样一来,我们的传感器就可以通过接收并调用命令来使得小人偶动起来了:
1 // ... Sensor Process ... 2 ArmDrive* arm = ArmDrive::getInstance(); 3 LegDrive* leg = LegDrive::getInstance(); 4 Command* aCommand = new PunchCommand(arm); 5 aCommand->execute(); // execute command. 6 delete aCommand; 7 aCommand = new KickCommand(leg); 8 aCommand->execute(); // execute command.
Command模式的好处还不仅限于此。大家一定熟悉批处理、宏等概念吧。结合Composite设计模式(请见索引),我们可以设计MacroCommand,从而批量执行一系列的命令。而对于MarcroCommand本身来说,它也无需要知道其各个子命令的具体执行者,因为它只需调用子命令即可。它具有add和remove方法来管理子命令。
1 // ... Macro Command ... 2 class MacroCommand : public Command { 3 public: 4 MacroCommand(); 5 virtual ~MacroCommand(); 6 7 virtual void add(Command*); 8 virtual void remove(Command*); 9 10 virtual void execute(); 11 private: 12 List<Command*>* _cmds; 13 }; 14 15 void MacroCommand::execute() { 16 ListIterator<Command*> i (_cmds); 17 18 for (i.first(); !i.isDone(); i.next()) { 19 Command* c = i.currentItem(); 20 c->execute(); 21 } 22 } 23 24 void MacroCommand::add (Command* c) { 25 _cmds->append(c); 26 } 27 28 void MacroCommand::remove(Command* c) { 29 _cmds->remove(c); 30 }
举例来看,我们想让小人偶打出一系列拳脚组合的“连招”:
1 // ... Punch Punch Kick and Punch ... 2 MacroCommand* aMCmd = new MacroCommand(); 3 aMCmd->add(new PunchCommand(arm)); 4 aMCmd->add(new PunchCommand(arm)); 5 aMCmd->add(new KickCommand(leg)); 6 aMCmd->add(new PunchCommand(arm)); 7 aMCmd->execute();
怎么样,是不是很酷!让我们来看一下这个设计的UML图:

特点总结
从以上我们可以看到,Command模式具有如下一些特点:
- 它将调用操作的对象与知道如何实现该操作的对象解耦;
- Command是头等的对象。它们可像其他的对象一样被操纵和扩展;
- 可将多个命令装配成一个复合命令。比如MacroCommand;
- 增加新的Command很容易,因为这无需改变已有的类。
写在最后
今天的笔记就到这里了,欢迎大家批评指正!如果觉得可以的话,好文推荐一下,我会非常感谢的!


