压缩感知重构算法之子空间追踪(SP)
SP的提出时间比CoSaMP提出时间稍晚一些,但和压缩采样匹配追踪(CoSaMP)的方法几乎是一样的。SP与CoSaMP主要区别在于“In each iteration, in the SP algorithm, only K new candidates are added, while theCoSAMP algorithm adds 2K vectors.”,即SP每次选择K个原子,而CoSaMP则选择2K个原子;这样带来的好处是“This makes the SP algorithm computationally moreefficient,”。
在看代码之前,先看了SP的论文[1],在摘要部分提到SP算法具有两个主要特点:一是较低的计算复杂度,特别是针对比较稀疏的信号的重构时,相比OMP算法,SP算法具有更低的计算复杂度;二是具有和线性规划优化(LP)方法相近的重构精度。在待重构信号具有比较小的稀疏度的情况下,SP的计算复杂度明显比LP方法的小,但是重构质量比LP的差。
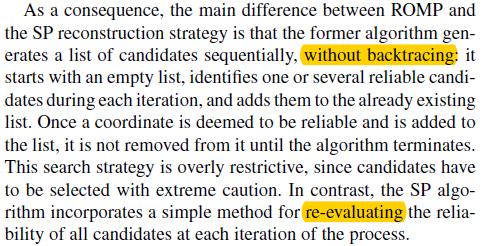
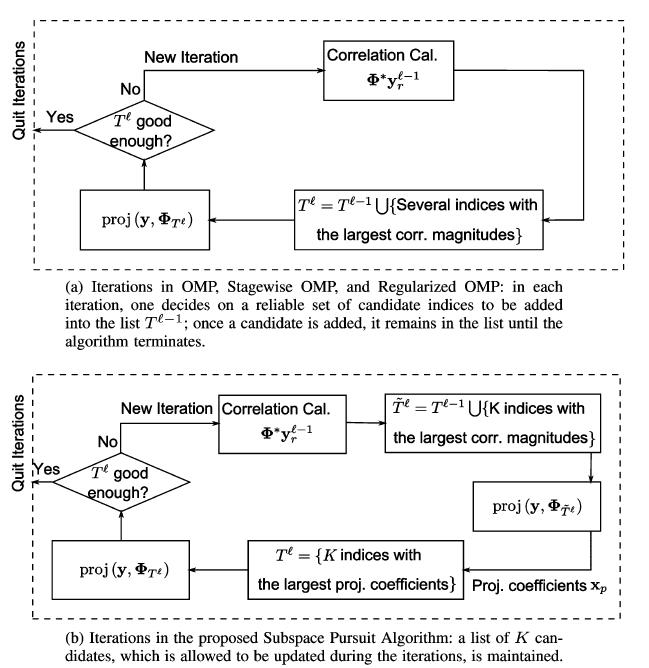
在论文中还提到这么一段与OMP方法的比较,并提供了图形加以理解。SP方法和OMP方法最大的区别就是针对所选择的原子有无回溯(反向跟踪)。
参考文献[2]中对SP算法进行了解释,如下所示:
在论文中还提到这么一段与OMP方法的比较,并提供了图形加以理解。SP方法和OMP方法最大的区别就是针对所选择的原子有无回溯(反向跟踪)。
以下是文献[1]中的给出的SP算法流程:
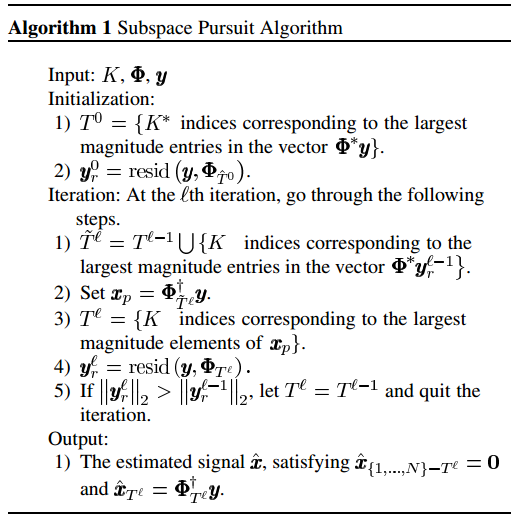
这个算法流程的初始化(Initialization)其实就是类似于CoSaMP的第1次迭代,注意第(1)步中选择了K个原子:“K indices corresponding to the largest magnitude entries”,在CoSaMP里这里要选择2K个最大的原子,后面的其它流程都一样。这里第(5)步增加了一个停止迭代的条件:当残差经过迭代后却变大了的时候就停止迭代。
鉴于SP与CoSaMP如此相似,这里不就再单独给出SP的步骤了,参考《压缩感知重构算法之压缩采样匹配追踪(CoSaMP)》,只需将第(2)步中的2K改为K即可。
function [ theta ] = CS_SP( y,A,K )
%CS_SP Summary of this function goes here
%Version: 1.0 written by jbb0523 @2015-05-01
% Detailed explanation goes here
% y = Phi * x
% x = Psi * theta
% y = Phi*Psi * theta
% 令 A = Phi*Psi, 则y=A*theta
% K is the sparsity level
% 现在已知y和A,求theta
% Reference:Dai W,Milenkovic O.Subspace pursuit for compressive sensing
% signal reconstruction[J].IEEE Transactions on Information Theory,
% 2009,55(5):2230-2249.
[y_rows,y_columns] = size(y);
if y_rows<y_columns
y = y';%y should be a column vector
end
[M,N] = size(A);%传感矩阵A为M*N矩阵
theta = zeros(N,1);%用来存储恢复的theta(列向量)
Pos_theta = [];%用来迭代过程中存储A被选择的列序号
r_n = y;%初始化残差(residual)为y
for kk=1:K%最多迭代K次
%(1) Identification
product = A'*r_n;%传感矩阵A各列与残差的内积
[val,pos]=sort(abs(product),'descend');
Js = pos(1:K);%选出内积值最大的K列
%(2) Support Merger
Is = union(Pos_theta,Js);%Pos_theta与Js并集
%(3) Estimation
%At的行数要大于列数,此为最小二乘的基础(列线性无关)
if length(Is)<=M
At = A(:,Is);%将A的这几列组成矩阵At
else%At的列数大于行数,列必为线性相关的,At'*At将不可逆
break;%跳出for循环
end
%y=At*theta,以下求theta的最小二乘解(Least Square)
theta_ls = (At'*At)^(-1)*At'*y;%最小二乘解
%(4) Pruning
[val,pos]=sort(abs(theta_ls),'descend');
%(5) Sample Update
Pos_theta = Is(pos(1:K));
theta_ls = theta_ls(pos(1:K));
%At(:,pos(1:K))*theta_ls是y在At(:,pos(1:K))列空间上的正交投影
r_n = y - At(:,pos(1:K))*theta_ls;%更新残差
if norm(r_n)<1e-6%Repeat the steps until r=0
break;%跳出for循环
end
end
theta(Pos_theta)=theta_ls;%恢复出的theta
end
鉴于SP与CoSaMP的极其相似性,这里就不再给出单次重构和测量数M与重构成功概率关系曲线绘制例程代码了,只需将CoSaMP中调用CS_CoSaMP函数的部分改为调用CS_SP即可,无须任何其它改动。这里给出对比两种重构算法所绘制的测量数M与重构成功概率关系曲线的例程代码,只有这样才可以看出两种算法的重构性能优劣,以下是在分别运行完SP与CoSaMP的测量数M与重构成功概率关系曲线绘制例程代码的基础上,即已经存储了数据CoSaMPMtoPercentage1000.mat和SPMtoPercentage1000.mat:
clear all;close all;clc;
load CoSaMPMtoPercentage1000;
PercentageCoSaMP = Percentage;
load SPMtoPercentage1000;
PercentageSP = Percentage;
S1 = ['-ks';'-ko';'-kd';'-kv';'-k*'];
S2 = ['-rs';'-ro';'-rd';'-rv';'-r*'];
figure;
for kk = 1:length(K_set)
K = K_set(kk);
M_set = 2*K:5:N;
L_Mset = length(M_set);
plot(M_set,PercentageCoSaMP(kk,1:L_Mset),S1(kk,:));%绘出x的恢复信号
hold on;
plot(M_set,PercentageSP(kk,1:L_Mset),S2(kk,:));%绘出x的恢复信号
end
hold off;
xlim([0 256]);
legend('CoSaK=4','SPK=4','CoSaK=12','SPK=12','CoSaK=20',...
'SPK=20','CoSaK=28','SPK=28','CoSaK=36','SPK=36');
xlabel('Number of measurements(M)');
ylabel('Percentage recovered');
title('Percentage of input signals recovered correctly(N=256)(Gaussian)');
运行结果如下:
可以发现在M较小时SP略好于CoSaMP,当M变大时二者重构性能几乎一样。
参考文献:
[1] Dai W,Milenkovic O.Subspacepursuit for compressive sensing signal reconstruction[J].IEEETransactions on Information Theory,2009,55(5):2230-2249.
[2] 杨真真,杨震,孙林慧.信号压缩重构的正交匹配追踪类算法综述[J]. 信号处理,2013,29(4):486-496.
