
四元数与欧拉角之间的转换
在3D图形学中,最常用的旋转表示方法便是四元数和欧拉角,比起矩阵来具有节省存储空间和方便插值的优点。本文主要归纳了两种表达方式的转换,计算公式采用3D笛卡尔坐标系:
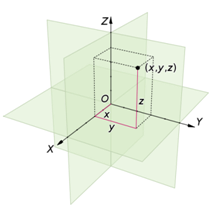
图1 3D Cartesian coordinate System (from wikipedia)
定义 分别为绕Z轴、Y轴、X轴的旋转角度,如果用Tait-Bryan angle表示,分别为Yaw、Pitch、Roll。
分别为绕Z轴、Y轴、X轴的旋转角度,如果用Tait-Bryan angle表示,分别为Yaw、Pitch、Roll。
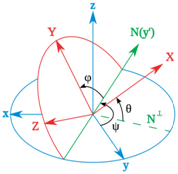
图2 Tait-Bryan angles (from wikipedia)
一、四元数的定义
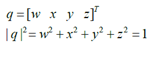
通过旋转轴和绕该轴旋转的角度可以构造一个四元数:
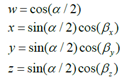
其中 是绕旋转轴旋转的角度,
是绕旋转轴旋转的角度, 为旋转轴在x,y,z方向的分量(由此确定了旋转轴)。
为旋转轴在x,y,z方向的分量(由此确定了旋转轴)。
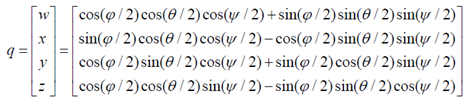
二、欧拉角到四元数的转换
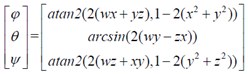
三、四元数到欧拉角的转换
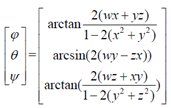
arctan和arcsin的结果是 ,这并不能覆盖所有朝向(对于
,这并不能覆盖所有朝向(对于 角
角 的取值范围已经满足),因此需要用atan2来代替arctan。
的取值范围已经满足),因此需要用atan2来代替arctan。
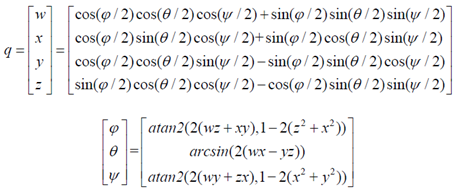
四、在其他坐标系下使用
在其他坐标系下,需根据坐标轴的定义,调整一下以上公式。如在Direct3D中,笛卡尔坐标系的X轴变为Z轴,Y轴变为X轴,Z轴变为Y轴(无需考虑方向)。
五、示例代码
http://www.cppblog.com/Files/heath/Euler2Quaternion.rar
Demo渲染两个模型,左边使用欧拉角,右边使用四元数,方向键Up、Left、Right旋转模型。
参考文献:
[1] http://en.wikipedia.org/wiki/Conversion_between_quaternions_and_Euler_angles
[2] Ken Shoemake, Animating Rotation with Quaternion Curves, 1985
posted on 2010-11-21 11:32 wqj1212 阅读(111319) 评论(5) 编辑 收藏 举报


