

SLAM入门之视觉里程计(3):两视图对极约束 基础矩阵
在上篇相机模型中介绍了图像的成像过程,场景中的三维点通过“小孔”映射到二维的图像平面,可以使用下面公式描述:
基础矩阵\(F\)表示的就是这种从点到直线的映射。
F的几何推导
该推导来自《计算机视觉中的多视图几何》。
要将一幅图像上的像点\(x\)映射到另一幅图像对应的对极线\(l'\)可以分为两步:第一步,将像点\(x\)映射到另一幅图像上与之对应的对极线\(l'\)上的某点\(x'\)上,\(x'\)是\(x\)的匹配点;第二步,连接对极点\(e'\)与点\(x'\)得到的直线就是对极线\(l'\)。
- 点通过平面转移 如下图,平面\(\pi\)不通过两相机中心,过第一个相机的中心\(C\)和像点\(x\)的射线与\(\pi\)相交于点\(X\)。该点\(X\)再投影到第二幅图像上得到像点\(x'\),这个过程称为点通过平面的转移。
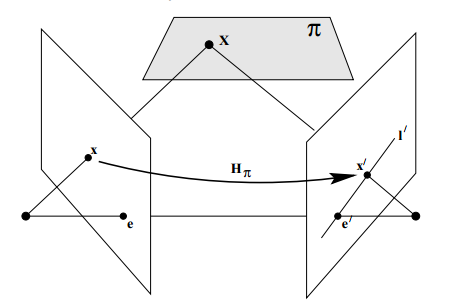
点\(X\)位于像点\(x\)和相机中心确定的射线上,其在另一幅图像上的像点\(x'\)必然位于该射线在另一幅图像的投影也就是对极线\(l'\)上。点\(x\)和点\(x'\)都是三维点\(X\)的像点,这样第一副图像上的像点集合\(x_i\)和第二幅图像上的像点集合\(x'_i\)是射影等价的,它们都射影等价于共面的三维点集合\(X_i\)。因此,存在一个2D单应\(H_{\pi}\),把每一个点\(x\)映射到对应的点\(x'\)上。
2D单应\(H_{\pi}\)指的是将射影平面上的点集\(x_i\)映射到另一个射影平面的点集\(x'_i\)上的射影变换,在实际情况中\(x_i\)和\(x'_i\)通常是两幅图像上的像点,每幅图像都被视为一个射影平面。
-
构造对极线 给点点\(x'\),通过\(x'\)和对极点\(e'\)的对极线\(l'\)可以表示为:$$l'=e'\times x'=[e']{\times}\cdot x'$$.
又由于\(x'=H_{\pi}x\)(\(H_{\pi}\)是将\(x\)变换为\(x'\)的单应),带入上式可得: $$l'=[e']H_{\pi} x$$
定义$$F=[e']{\times}H$$
这样就得到了从点\(x\)到对极线\(l'\)的变换$$l'=Fx$$
以上就是基础矩阵\(F\)的推导过程。 -
基础矩阵\(F\)可以记为:\(F=[e']_{\times}H_{\pi}\),其中\(H_{\pi}\)是一幅图像上像点到另一幅图像上的2D单应,\([e']_{\times}\)是对极点\(e'\)的反对称矩阵。由于\([e']_{\times}\)秩为2,\(H_{\pi}\)的秩为3,基础矩阵\(F\)的秩为2.
-
对极约束
由于\(l'=Fx\),而像点\(x'\)在对极线\(l'\)上,故可得到
上式被称为对极约束,仅通过匹配的点对就可以求出两视图的基础矩阵\(F\)。
向量的叉积,反对称矩阵\([e']_{\times}\) 在射影几何中,一条直线有两点确定,如上面对极线有像点\(x'\)和对极点\(e'\)确定,并且可以表示为这两个点的叉积形式,有\(l'=e'\times x'\)。
设有两个向量\(\overrightarrow{a},\overrightarrow{b}\),则这两个向量的叉积仍然是一个向量,并且垂直于\(\overrightarrow{a},\overrightarrow{b}\)所在的平面。其坐标表示如下:
其中\(\overrightarrow{a}_{\times}\)称为向量\(\overrightarrow{a}\)的反对称矩阵
通过引入反对称矩阵,向量的叉积可以使用矩阵乘法的表示,形式非常简洁。
F的代数推导
该推导来自《视觉SLAM十四讲》
设以第一个相机作为坐标系三维空间的点\(P=[X,Y,Z]\),其在两个相机的像点分别为\(p_1,p_2\)。由于第一个相机的中心作为世界坐标系的原点,也就是说第一个相机没有旋转和平移,通过小孔相机模型可得:
其中,\(K\)是相机的内参,\(R,t\)是第二个相机相对于第一个相机的旋转和平移。
从\(p_1 = KP\)可以得到\(P=K^{-1}p_1\),带入第二个式子可得到:
两边同时左乘\(K^{-1}\),得到
设\(x_1=K^{-1}p_1,x_2=K^{-1}p_2\),代入
两边同时左乘向量\(t\)的反对称矩阵\(t_{\times}\),由于\(t_{\times}t=0\),消除\(t\)
两边再同时左乘\(x_2^T\)
由于\(t_{\times}x_2\)是向量\(t\)和向量\(x_2\)的叉积,同时垂直于向量\(t\)和向量\(x_2\),所以左边\(x_2^Tt_{\times}x_2=0\),得到
再将\(x_1,x_2\)换掉
上式是对极约束的另一种表示,该式子中仅包含像点,相机的旋转和平移,中间的矩阵就是基础矩阵\(F\)。
式子\(F=K^{-T}t_{\times}RK^{-1}\),可知假如相机的内参数\(K\)是已知的,提取中间的矩阵可到
E被称为本质矩阵,其和基础矩阵相差相机的内参\(K\)。
通过匹配的点对计算相机的位姿
通过上面的知道,对于匹配的像点\(p_1,p_2\)以及基础矩阵\(F\)有如下关系:
也就是说,仅通过匹配的点对(最少7对)可以计算出两视图的基础矩阵\(F\),然后再从\(F\)中分解得到相机的位姿势。
相机的相对位姿可以通过特征点匹配估计出来:
- 提取两幅图像的特征点,并进行匹配
- 利用匹配得像点计算两视图的基础矩阵\(F\)
- 从基础矩阵\(F\)中分解得到相机的选择矩阵\(R\)和平移向量\(t\)

