

Linux V4L2之camera
一、硬件知识
1. 摄像头硬件结构和工作原理,如图1&图2
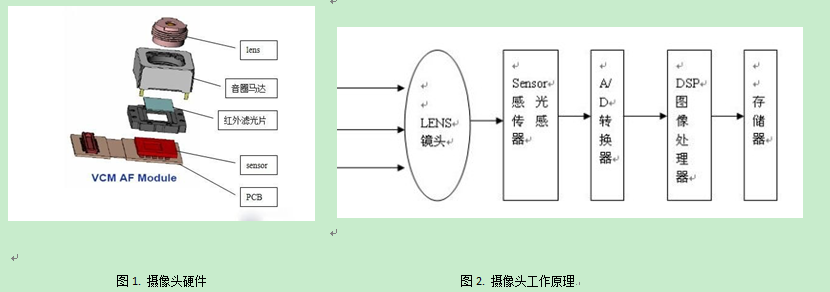
外部光线穿过lens镜头,经过红外滤光片后光学图像投射到传感器上,然后光学图像被转换成电信号,电信号再经过模数转换变为数字信号,数字信号经过DSP加工处理,
再被送到接收端进行处理,最终转换成屏幕上能够看到的图像。 其中:
1)滤光片作用:
a. 滤除红外线,滤除对可见光有干扰的红外光,使成像效果更清晰。
b. 修整进来的光线,感光芯片由感光体(CELL)构成,最好的光线是直射进来,但为了怕干扰到邻近感光体
就需要对光线加以修整,因此那片滤光片不是玻璃,而是石英片,利用石英的物理偏光特性,把进来
的光线保留直射部份,反射掉斜射部份,避免去影响旁边的感光点。
2)常见的sensor传感器主要有两种:
a. CCD传感器(Chagre Couled Device),即电荷耦合器。
b. CMOS传感器(Complementary Metal-Oxide Semiconductor),即互补性金属氧化物半导体。
CCD的优势在于成像质量好,但是制造工艺复杂,成本高昂,且耗电高。在相同分辨率下,CMOS价格
比CCD便宜,但图像质量相比CCD来说要低一些。CMOS影像传感器相对CCD具有耗电低的优势,加上随
着工艺技术的进步,CMOS的画质水平也不断地在提高,所以目前市面上的手机摄像头都采用CMOS传感器。
3)DSP (DIGITAL SIGNAL PROCESSING):
主要是通过一系列复杂的数学算法运算,对数字图像信号参数进行优化处理,并把处理后的信号通过USB等接口传到PC等设备。结构框架: ISP(image signal processor)(镜像信号处理器)、JPEG encoder(JPEG图像解码器)、USB device controller(USB设备控制器)
对于低分辨率来说(300W像素以下), 一般摄像头自带DSP/ISP处理模块,提供简单的自动白平衡、 gamma、sharpness等功能,而高分辨率或者需要提供更增强功能时,可以使用处理器自带的ISP模块(前提是处理器有)。
一般ISP支持输出YUV、RGB、JPEG格式。
2. 摄像头引脚作用&硬件连接:
目前摄像头接口主要采用MIPI CSI & DVP, 前者是串行(多组差分信号线), 后者是并口传输(8/10bit)。 图3以DVP接口介绍各个引脚作用及硬件连接:
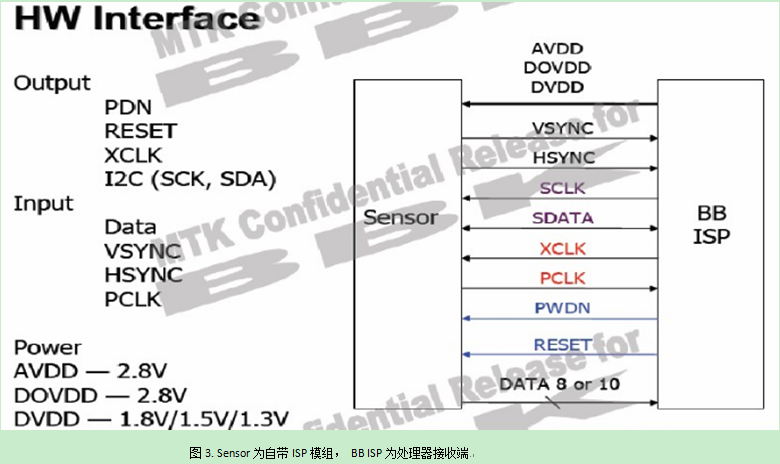
DVP分为三个部分:
1)输入总线:
a. data为sensor的数据管脚,可输出8/10bit并口数据到处理器接受端。
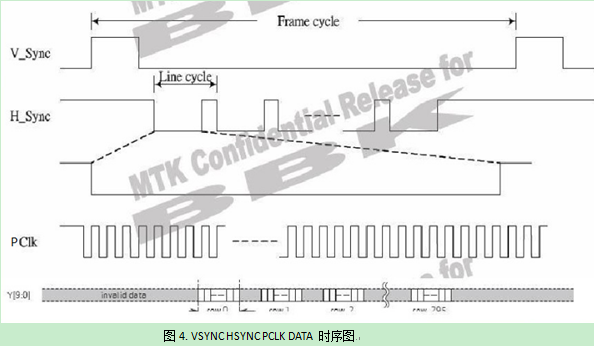
b. VSYNC为帧同步信号管脚,一个VSYNC信号结束表示一个画面的数据已经传输完毕。
c. HSYNC为行同步信号管脚,一个HSYNC信号结束表示一行的数据已经传输完毕。
p. PCLK为像素同步信号管脚,一个PCLK信号结束表示一个像素的数据(大小取决格式)已经传输完毕。
以上管脚的关系如下图:
2)输出总线 :
a. PDN(power down enable), camera使能管脚,当PDN=1时, 一切对camera操作都是无效的。
b. RESET, 复位管脚, 低电平有效。
c. XCLK(MCLK), sensor的工作时钟管脚,可由外部晶振或者处理器提供。
d. I2C总线, 处理器与sensor通信管脚, 用于配置sensor。
3)Power:
a. AVDD 模拟电压
b. DOVDD GPIO口数字电压
c. DVDD 核工作电压
二、成像原理
本节主要讲解目前主流的bayer格式图片的成像原理, bayer格式图片是伊士曼·柯达公司科学家Bryce Bayer发明的,Bryce Bayer所发明的拜耳阵列被广泛运用数字图像。
对于彩色图像,需要采集最基本的颜色,如RGB三种颜色,最简单的方法就是用滤镜的方法,红色的滤镜透过红色的波长,绿色的滤镜透过绿色的波长,蓝色的滤镜透过蓝色的波长。如果要同时采集三个基本色,则需要三块滤镜,这样价格昂贵,且不好制造,因为三块滤镜都必须保证每一个像素点都对齐。当用bayer格式的时候,很好的解决了这个问题。bayer 格式在每个像素(pixel)上只设置一种颜色滤镜,外部光线在每个像素点上存储是单色的, 因此经过ADC转换出来的原始数据称为RAW RGB DATA,通过分析人眼对颜色的感知发现,人眼对绿色比较敏感,所以一般bayer格式的图片绿色格式的像素是是R和B像素的和。

当Image Sensor往外逐行输出数据时,像素的序列为GRGRGR.../BGBGBG...(交替)。这样阵列的设计,使得RGB传感器为全色传感器的1/3。
每一个像素仅仅包括了光谱的一部分,必须通过插值来实现每个像素的RGB值。为了从Bayer格式得到每个像素的RGB格式,我们需要通过插值填补缺失的2个色彩。插值的方法有很多(包括领域、线性、3*3等),速度与质量权衡,最好是线性插值补偿算法。
从图5 Sensor 像素阵列来看, 存在4中分布格式:

对于图6(a)(b)来说, G像素的R、B分量分别取两个邻域的平均値,由于存在(a)(b)两种分布情况,所以直接去4个相邻域的平均値既是G像素的R&B分量。
对于图6(c)来说,R像素的G分量可以取4个相邻域的平均值,B分量取外围4个域的平均值。
对于图6(d)来说,B像素的G分量可以取4个相邻域的平均值,R分量取外围4个域的平均值。
当然, RAW RGB DATA也可以转换成YUV格式或者 先转成RGB再转换YUV,就不详解了......
三、V4L2软件架构
1. 概述
Video4 for Linux 2是Linux内核中关于视频设备的内核驱动框架,为上层的访问底层的视频设备提供了统一的接口。凡是内核中的子系统都有抽象底层硬件的差异,为上层提供统一的接口和提取出公共代码避免代码冗余等。 V4L2支持三类设备:视频输入输出设备、VBI设备和radio设备(其实还支持更多类型的设备,暂不讨论),分别会在/dev目录下产生videoX、radioX和vbiX设备节点。 图7是V4L2在linux系统中的结构图:
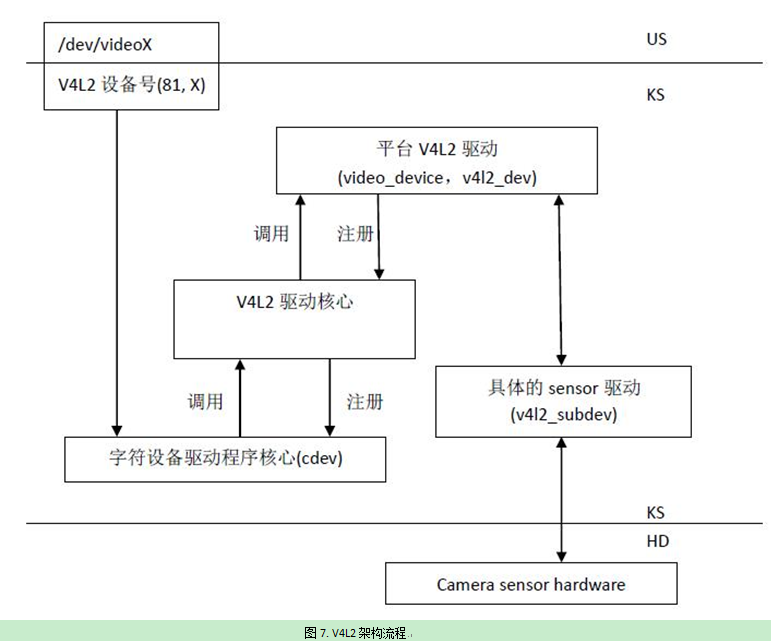
Linux系统中视频输入设备主要包括以下四个部分:
字符设备驱动:V4L2本身就是一个字符设备,具有字符设备所有的特性,暴露接口给用户空间;
V4L2驱动核心:主要是构建一个内核中标准视频设备驱动的框架,为视频操作提供统一的接口函数;
平台V4L2设备驱动:在V4L2框架下,根据平台自身的特性实现与平台相关的V4L2驱动部分,包括注册video_device和v4l2_dev;
具体的sensor驱动:主要上电、提供工作时钟、视频图像裁剪、流IO开启等,实现各种设备控制方法供上层调用并注册v4l2_subdev。
2. 详解V4L2框架
v4L2的核心源码位于drivers/media/v4l2-core,根据功能可以划分为四类:
字符设备模块:由v4l2-dev.c实现,主要作用申请字符主设备号、注册class和提供video device注册注销等相关函数;
V4L2基础框架:由v4l2-device.c、v4l2-subdev.c、v4l2-fh.c、v4l2-ctrls.c等文件构建V4L2基础框架;
videobuf管理:由videobuf2-core.c、videobuf2-dma-contig.c、videobuf2-dma-sg.c、videobuf2-memops.c、videobuf2-vmalloc.c、v4l2-mem2mem.c等文件实现,完成videobuffer的分配、管理和注销;
Ioctl框架:由v4l2-ioctl.c文件实现,构建V4L2ioctl的框架。
2.1 V4L2基础框架如图8:
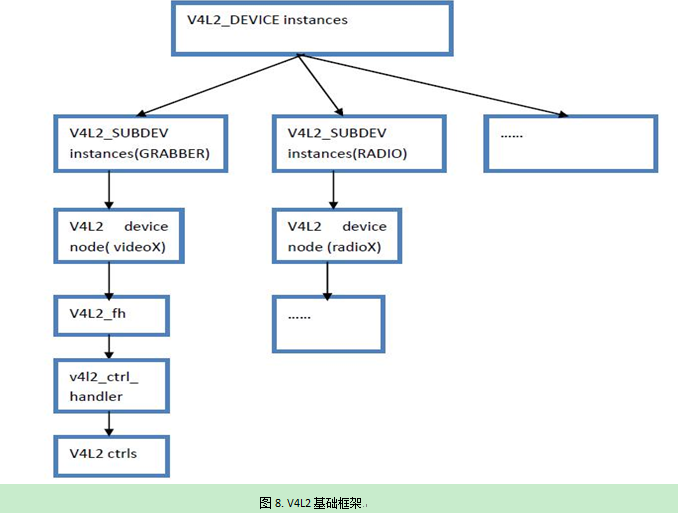
上图V4L2框架是一个标准的树形结构,v4l2_device充当了父设备,通过链表把所有注册到其下的子设备管理起来,这些设备可以是GRABBER、VBI或RADIO。V4l2_subdev是子设备,v4l2_subdev结构体包含了对设备操作的ops和ctrls,这部分代码和硬件相关,需要驱动工程师根据硬件实现控制上下电、读取ID、饱和度、对比度和视频数据流打开关闭等接口函数。Video_device用于创建子设备节点,把操作设备的接口暴露给用户空间。V4l2_fh是每个子设备的文件句柄,在打开设备节点文件时设置,方便上层索引到v4l2_ctrl_handler,v4l2_ctrl_handler管理设备的ctrls,这些ctrls(摄像头设备)包括调节饱和度、对比度和白平衡等。
结构体v4l2_device、video_device、v4l2_subdev和v4l2_ctrl_handler是构成框架的主要元素,现分别介绍:
1. struct v4l2_device : v4l2_device在v4l2框架中充当所有v4l2_subdev的父设备,管理着注册在其下的子设备 struct v4l2_device { structlist_head subdevs; //用链表管理注册的subdev charname[V4L2_DEVICE_NAME_SIZE]; //device 名字 structkref ref; //引用计数 ......... }; 可以看出v4l2_device的主要作用是管理注册在其下的子设备,方便系统查找引用到。 v4l2_device的注册和注销: int v4l2_device_register(struct device*dev, struct v4l2_device *v4l2_dev) static void v4l2_device_release(struct kref *ref) 2. struct v4l2_subdev : v4l2_subdev代表子设备,包含了子设备的相关属性和操作。结构体原型: struct v4l2_subdev { struct v4l2_device *v4l2_dev; //指向父设备 conststruct v4l2_subdev_ops *ops; //提供一些控制v4l2设备的接口 conststruct v4l2_subdev_internal_ops *internal_ops; //向V4L2框架提供的接口函数 structv4l2_ctrl_handler *ctrl_handler; //subdev控制接口 charname[V4L2_SUBDEV_NAME_SIZE]; struct video_device *devnode; .......... }; 每个子设备驱动都需要实现一个v4l2_subdev结构体,v4l2_subdev可以内嵌到其它结构体中,也可以独立使用。 结构体中包含了对子设备操作的成员v4l2_subdev_ops和v4l2_subdev_internal_ops struct v4l2_subdev_ops { const struct v4l2_subdev_core_ops *core; //视频设备通用的操作:初始化、加载FW、上电和RESET等 const struct v4l2_subdev_tuner_ops *tuner; //tuner特有的操作 const struct v4l2_subdev_audio_ops *audio; //audio特有的操作 const struct v4l2_subdev_video_ops *video; //视频设备的特有操作:裁剪图像、开关视频流等 const struct v4l2_subdev_pad_ops *pad; .......... }; struct v4l2_subdev_internal_ops { /* 当subdev注册时被调用,读取IC的ID来进行识别 */ int(*registered)(struct v4l2_subdev *sd); void(*unregistered)(struct v4l2_subdev *sd); /* 当设备节点被打开时调用,通常会给设备上电和设置视频捕捉FMT */ int(*open)(struct v4l2_subdev *sd, struct v4l2_subdev_fh *fh); int(*close)(struct v4l2_subdev *sd, struct v4l2_subdev_fh *fh); }; 视频设备通常需要实现core和video成员,这两个OPS中的操作都是可选的,但是对于视频流设备video->s_stream(开启或关闭流IO)必须要实现。v4l2_subdev_internal_ops是向V4L2框架提供的接口,只能被V4L2框架层调用。在注册或打开子设备时,进行一些辅助性操作。 Subdev的注册和注销: int v4l2_device_register_subdev(struct v4l2_device *v4l2_dev, struct v4l2_subdev *sd) void v4l2_device_unregister_subdev(struct v4l2_subdev *sd) 3. struct video_device video_device结构体用于在/dev目录下生成设备节点文件,把操作设备的接口暴露给用户空间 struct video_device { const struct v4l2_file_operations *fops; //V4L2设备操作集合 struct cdev *cdev; //字符设备 struct v4l2_device *v4l2_dev; struct v4l2_ctrl_handler *ctrl_handler; struct vb2_queue *queue; //指向video buffer队列 int vfl_type; /* device type */ intminor; //次设备号 /*ioctl回调函数集,提供file_operations中的ioctl调用 */ const struct v4l2_ioctl_ops *ioctl_ops; .......... }; Video_device分配和释放, 用于分配和释放video_device结构体: struct video_device *video_device_alloc(void) void video_device_release(struct video_device *vdev) video_device注册和注销,实现video_device结构体的相关成员后,就可以调用下面的接口进行注册: static inline int __must_check video_register_device(struct video_device *vdev, inttype, int nr) void video_unregister_device(struct video_device*vdev); vdev:需要注册和注销的video_device; type:设备类型,包括VFL_TYPE_GRABBER、VFL_TYPE_VBI、VFL_TYPE_RADIO和VFL_TYPE_SUBDEV。 nr:设备节点名编号,如/dev/video[nr]。 4. struct v4l2_ctrl_handler v4l2_ctrl_handler是用于保存子设备控制方法集的结构体,结构体如下: struct v4l2_ctrl_handler { struct list_head ctrls; struct list_head ctrl_refs; struct v4l2_ctrl_ref *cached; struct v4l2_ctrl_ref **buckets; v4l2_ctrl_notify_fnc notify; u16 nr_of_buckets; int error; }; 其中成员ctrls作为链表存储包括设置亮度、饱和度、对比度和清晰度等方法,可以通过v4l2_ctrl_new_xxx()函数创建具体方法并添加到链表ctrls。
2.2 videobuf管理
在讲解v4l2的buffer管理前,先介绍v4l2的IO访问, V4L2支持三种不同IO访问方式(内核中还支持了其它的访问方式,暂不讨论):
read和write:是基本帧IO访问方式,通过read读取每一帧数据,数据需要在内核和用户之间拷贝,这种方式访问速度可能会非常慢;
内存映射缓冲区(V4L2_MEMORY_MMAP):是在内核空间开辟缓冲区,应用通过mmap()系统调用映射到用户地址空间。这些缓冲区可以是大而连续DMA缓冲区、通过vmalloc()创建的虚拟缓冲区,或者直接在设备的IO内存中开辟的缓冲区(如果硬件支持);
用户空间缓冲区(V4L2_MEMORY_USERPTR):是用户空间的应用中开辟缓冲区,用户与内核空间之间交换缓冲区指针。很明显,在这种情况下是不需要mmap()调用的,但驱动为有效的支持用户空间缓冲区,其工作将也会更困难。
read和write方式属于帧IO访问方式,每一帧都要通过IO操作,需要用户和内核之间数据拷贝,而后两种是流IO访问方式,不需要内存拷贝,访问速度比较快。内存映射缓冲区访问方式是比较常用的方式。
现以V4L2_MEMORY_MMAP简单介绍数据流通过程:

Camera sensor捕捉到图像数据通过并口或MIPI传输到CAMIF(camera interface),CAMIF可以对图像数据进行调整(翻转、裁剪和格式转换等)。然后DMA控制器设置DMA通道请求AHB将图像数据传到分配好的DMA缓冲区。待图像数据传输到DMA缓冲区之后,mmap操作把缓冲区映射到用户空间,应用就可以直接访问缓冲区的数据。而为了使设备支持流IO这种方式,v4l2需要实现对video buffer的管理,即实现:
/* vb2_queue代表一个videobuffer队列,vb2_buffer是这个队列中的成员,vb2_mem_ops是缓冲内存的操作函数集,vb2_ops用来管理队列 */ struct vb2_queue { enum v4l2_buf_type type; //buffer类型 unsigned int io_modes; //访问IO的方式:mmap、userptr etc const struct vb2_ops *ops; //buffer队列操作函数集合 const struct vb2_mem_ops *mem_ops; //buffer memory操作集合 struct vb2_buffer *bufs[VIDEO_MAX_FRAME]; //代表每个frame buffer unsignedint num_buffers; //分配的buffer个数 .......... }; /* vb2_mem_ops包含了内存映射缓冲区、用户空间缓冲区的内存操作方法 */ struct vb2_mem_ops { void *(*alloc)(void *alloc_ctx, unsignedlong size); //分配视频缓存 void (*put)(void *buf_priv); //释放视频缓存 /* 获取用户空间视频缓冲区指针 */ void *(*get_userptr)(void *alloc_ctx, unsigned long vaddr, unsignedlong size, int write); void (*put_userptr)(void *buf_priv); //释放用户空间视频缓冲区指针 /* 用于缓存同步 */ void (*prepare)(void *buf_priv); void (*finish)(void *buf_priv); /* 缓存虚拟地址 & 物理地址 */ void *(*vaddr)(void *buf_priv); void *(*cookie)(void *buf_priv); unsignedint (*num_users)(void *buf_priv); //返回当期在用户空间的buffer数 int (*mmap)(void *buf_priv, structvm_area_struct *vma); //把缓冲区映射到用户空间 .............. }; /* mem_ops由kernel自身实现并提供了三种类型的视频缓存区操作方法:连续的DMA缓冲区、集散的DMA缓冲区以及vmalloc创建的缓冲区,分别由videobuf2-dma-contig.c、videobuf2-dma-sg.c和videobuf-vmalloc.c文件实现,可以根据实际情况来使用。*/ /* vb2_ops是用来管理buffer队列的函数集合,包括队列和缓冲区初始化等 */ struct vb2_ops { //队列初始化 int(*queue_setup)(struct vb2_queue *q, const struct v4l2_format *fmt, unsigned int *num_buffers, unsigned int*num_planes, unsigned int sizes[], void *alloc_ctxs[]); //释放和获取设备操作锁 void(*wait_prepare)(struct vb2_queue *q); void(*wait_finish)(struct vb2_queue *q); //对buffer的操作 int(*buf_init)(struct vb2_buffer *vb); int(*buf_prepare)(struct vb2_buffer *vb); int(*buf_finish)(struct vb2_buffer *vb); void(*buf_cleanup)(struct vb2_buffer *vb); //开始/停止视频流 int(*start_streaming)(struct vb2_queue *q, unsigned int count); int(*stop_streaming)(struct vb2_queue *q); //把VB传递给驱动,以填充frame数据 void(*buf_queue)(struct vb2_buffer *vb); };
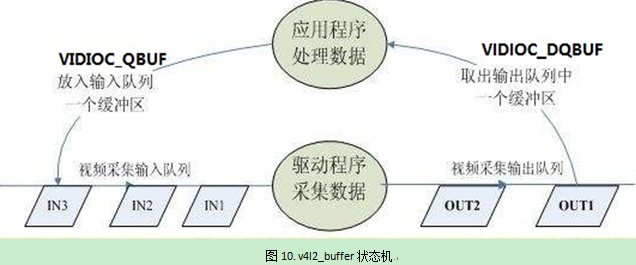
一个frame buffer(vb2_buffer/v4l2_buffer)可以有三种状态:
1. 在驱动的输入队列中,驱动程序将会对此队列中的缓冲区进行处理,用户空间通过IOCTL:VIDIOC_QBUF 把缓冲区放入到队列。对于一个视频捕获设备,传入队列中的缓冲区是空的,驱动会往其中填充数据;
2. 在驱动的输出队列中,这些缓冲区已由驱动处理过,对于一个视频捕获设备,缓存区已经填充了视频数据,正等用户空间来认领;
3. 用户空间状态的队列,已经通过IOCTL:VIDIOC_DQBUF传出到用户空间的缓冲区,此时缓冲区由用户空 间拥有,驱动无法访问。
这三种状态的切换如下图所示:
最终落脚点的struct v4l2_buffer结构如下:
struct v4l2_buffer { __u32 index; //buffer 序号 __u32 type; //buffer类型 __u32 bytesused; //缓冲区已使用byte数 structtimeval timestamp; //时间戳,代表帧捕获的时间 __u32 memory; //表示缓冲区是内存映射缓冲区还是用户空间缓冲区 union { __u32 offset; //内核缓冲区的位置 unsignedlong userptr; //缓冲区的用户空间地址 structv4l2_plane *planes; __s32 fd; } m; __u32 length; //缓冲区大小,单位byte };
当用户空间拿到v4l2_buffer,可以获取到缓冲区的相关信息。Byteused是图像数据所占的字节数,如果是V4L2_MEMORY_MMAP方式,m.offset是内核空间图像数据存放的开始地址,会传递给mmap函数作为一个偏移,通过mmap映射返回一个缓冲区指针p,p+byteused是图像数据在进程的虚拟地址空间所占区域;如果是用户指针缓冲区的方式,可以获取的图像数据开始地址的指针m.userptr,userptr是一个用户空间的指针,userptr+byteused便是所占的虚拟地址空间,应用可以直接访问
2.3 Ioctl框架如图:
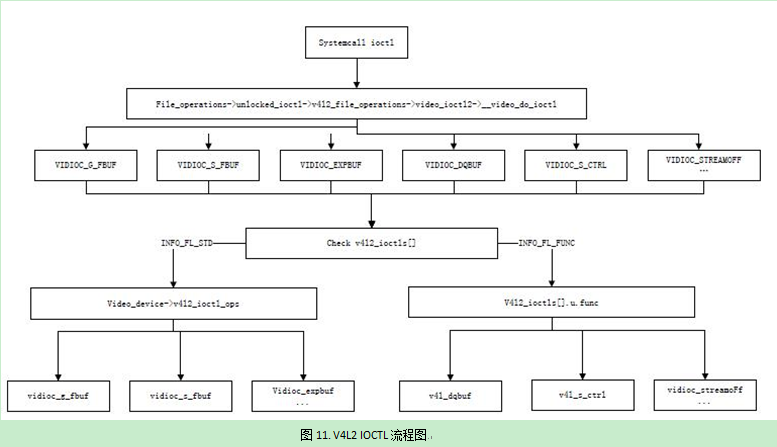
用户空间通过打开/dev/目录下的设备节点,获取到文件的file结构体,通过系统调用ioctl把cmd和arg传入到内核。通过一系列的调用后最终会调用到__video_do_ioctl函数,然后通过cmd检索v4l2_ioctls[],判断是INFO_FL_STD还是INFO_FL_FUNC。如果是INFO_FL_STD会直接调用到视频设备驱动中video_device->v4l2_ioctl_ops函数集。如果是INFO_FL_FUNC会先调用到v4l2自己实现的标准回调函数,然后根据arg再调用到video_device->v4l2_ioctl_ops或v4l2_fh->v4l2_ctrl_handler函数集。
四、用户空间访问 camera & 示例程序
/* * V4L2 video capture example * * This program can be used and distributed without restrictions. * * This program is provided with the V4L2 API * see http://linuxtv.org/docs.php for more information */ #include <stdio.h> #include <stdlib.h> #include <string.h> #include <assert.h> #include <getopt.h> /* getopt_long() */ #include <fcntl.h> /* low-level i/o */ #include <unistd.h> #include <errno.h> #include <sys/stat.h> #include <sys/types.h> #include <sys/time.h> #include <sys/mman.h> #include <sys/ioctl.h> #include <linux/videodev2.h> #define CLEAR(x) memset(&(x), 0, sizeof(x)) enum io_method { IO_METHOD_READ, IO_METHOD_MMAP, IO_METHOD_USERPTR, }; struct buffer { void *start; size_t length; }; static char *dev_name; static enum io_method io = IO_METHOD_MMAP; static int fd = -1; struct buffer *buffers; static unsigned int n_buffers; static int out_buf; static int force_format; static int frame_count = 4; static void errno_exit(const char *s) { fprintf(stderr, "%s error %d, %s\n", s, errno, strerror(errno)); exit(EXIT_FAILURE); } static int xioctl(int fh, int request, void *arg) { int r; do { r = ioctl(fh, request, arg); } while (-1 == r && EINTR == errno); return r; } static void process_image(const void *p, int size) { if (out_buf) fwrite(p, size, 1, stdout); fflush(stderr); fprintf(stderr, "."); fflush(stdout); } static void store_image(const char *buf_start, int size, int index) { char path[20]; snprintf(path, sizeof(path), "./yuyv%d.yuv", index); int fd = open(path, O_WRONLY|O_CREAT, 00700); if (-1 == fd) { fprintf(stderr, "Cannot open '%s': %d, %s\n", path, errno, strerror(errno)); exit(EXIT_FAILURE); } write(fd, buf_start, size); close(fd); } static int read_frame(void) { struct v4l2_buffer buf; unsigned int i; switch (io) { case IO_METHOD_READ: if (-1 == read(fd, buffers[0].start, buffers[0].length)) { switch (errno) { case EAGAIN: return 0; case EIO: /* Could ignore EIO, see spec. */ /* fall through */ default: errno_exit("read"); } } process_image(buffers[0].start, buffers[0].length); break; case IO_METHOD_MMAP: CLEAR(buf); buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; buf.memory = V4L2_MEMORY_MMAP; if (-1 == xioctl(fd, VIDIOC_DQBUF, &buf)) { switch (errno) { case EAGAIN: return 0; case EIO: /* Could ignore EIO, see spec. */ /* fall through */ default: errno_exit("VIDIOC_DQBUF"); } } assert(buf.index < n_buffers); //printf("buf.bytesused = %d\n", buf.bytesused); process_image(buffers[buf.index].start, buf.bytesused); store_image(buffers[buf.index].start, buf.bytesused, buf.index); if (-1 == xioctl(fd, VIDIOC_QBUF, &buf)) errno_exit("VIDIOC_QBUF"); break; case IO_METHOD_USERPTR: CLEAR(buf); buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; buf.memory = V4L2_MEMORY_USERPTR; if (-1 == xioctl(fd, VIDIOC_DQBUF, &buf)) { switch (errno) { case EAGAIN: return 0; case EIO: /* Could ignore EIO, see spec. */ /* fall through */ default: errno_exit("VIDIOC_DQBUF"); } } for (i = 0; i < n_buffers; ++i) if (buf.m.userptr == (unsigned long)buffers[i].start && buf.length == buffers[i].length) break; assert(i < n_buffers); process_image((void *)buf.m.userptr, buf.bytesused); if (-1 == xioctl(fd, VIDIOC_QBUF, &buf)) errno_exit("VIDIOC_QBUF"); break; } return 1; } /* two operations * step1 : delay * step2 : read frame */ static void mainloop(void) { unsigned int count; count = frame_count; while (count-- > 0) { for (;;) { fd_set fds; struct timeval tv; int r; FD_ZERO(&fds); FD_SET(fd, &fds); /* Timeout. */ tv.tv_sec = 2; tv.tv_usec = 0; r = select(fd + 1, &fds, NULL, NULL, &tv); if (-1 == r) { if (EINTR == errno) continue; errno_exit("select"); } if (0 == r) { fprintf(stderr, "select timeout\n"); exit(EXIT_FAILURE); } if (read_frame()) break; /* EAGAIN - continue select loop. */ } } } /* * one operation * step1 : VIDIOC_STREAMOFF */ static void stop_capturing(void) { enum v4l2_buf_type type; switch (io) { case IO_METHOD_READ: /* Nothing to do. */ break; case IO_METHOD_MMAP: case IO_METHOD_USERPTR: type = V4L2_BUF_TYPE_VIDEO_CAPTURE; if (-1 == xioctl(fd, VIDIOC_STREAMOFF, &type)) errno_exit("VIDIOC_STREAMOFF"); break; } } /* tow operations * step1 : VIDIOC_QBUF(insert buffer to queue) * step2 : VIDIOC_STREAMOFF */ static void start_capturing(void) { unsigned int i; enum v4l2_buf_type type; switch (io) { case IO_METHOD_READ: /* Nothing to do. */ break; case IO_METHOD_MMAP: for (i = 0; i < n_buffers; ++i) { struct v4l2_buffer buf; CLEAR(buf); buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; buf.memory = V4L2_MEMORY_MMAP; buf.index = i; if (-1 == xioctl(fd, VIDIOC_QBUF, &buf)) errno_exit("VIDIOC_QBUF"); } type = V4L2_BUF_TYPE_VIDEO_CAPTURE; if (-1 == xioctl(fd, VIDIOC_STREAMON, &type)) errno_exit("VIDIOC_STREAMON"); break; case IO_METHOD_USERPTR: for (i = 0; i < n_buffers; ++i) { struct v4l2_buffer buf; CLEAR(buf); buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; buf.memory = V4L2_MEMORY_USERPTR; buf.index = i; buf.m.userptr = (unsigned long)buffers[i].start; buf.length = buffers[i].length; if (-1 == xioctl(fd, VIDIOC_QBUF, &buf)) errno_exit("VIDIOC_QBUF"); } type = V4L2_BUF_TYPE_VIDEO_CAPTURE; if (-1 == xioctl(fd, VIDIOC_STREAMON, &type)) errno_exit("VIDIOC_STREAMON"); break; } } /* two operations * step1 : munmap buffers * steo2 : free buffers */ static void uninit_device(void) { unsigned int i; switch (io) { case IO_METHOD_READ: free(buffers[0].start); break; case IO_METHOD_MMAP: for (i = 0; i < n_buffers; ++i) if (-1 == munmap(buffers[i].start, buffers[i].length)) errno_exit("munmap"); break; case IO_METHOD_USERPTR: for (i = 0; i < n_buffers; ++i) free(buffers[i].start); break; } free(buffers); } static void init_read(unsigned int buffer_size) { buffers = calloc(1, sizeof(*buffers)); if (!buffers) { fprintf(stderr, "Out of memory\n"); exit(EXIT_FAILURE); } buffers[0].length = buffer_size; buffers[0].start = malloc(buffer_size); if (!buffers[0].start) { fprintf(stderr, "Out of memory\n"); exit(EXIT_FAILURE); } } static void init_mmap(void) { struct v4l2_requestbuffers req; CLEAR(req); req.count = 4; req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; req.memory = V4L2_MEMORY_MMAP; if (-1 == xioctl(fd, VIDIOC_REQBUFS, &req)) { if (EINVAL == errno) { fprintf(stderr, "%s does not support " "memory mapping\n", dev_name); exit(EXIT_FAILURE); } else { errno_exit("VIDIOC_REQBUFS"); } } if (req.count < 2) { fprintf(stderr, "Insufficient buffer memory on %s\n", dev_name); exit(EXIT_FAILURE); } buffers = calloc(req.count, sizeof(*buffers)); if (!buffers) { fprintf(stderr, "Out of memory\n"); exit(EXIT_FAILURE); } for (n_buffers = 0; n_buffers < req.count; ++n_buffers) { struct v4l2_buffer buf; CLEAR(buf); buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; buf.memory = V4L2_MEMORY_MMAP; buf.index = n_buffers; if (-1 == xioctl(fd, VIDIOC_QUERYBUF, &buf)) errno_exit("VIDIOC_QUERYBUF"); buffers[n_buffers].length = buf.length; printf("buffers[%d].length=%d\n", n_buffers, buffers[n_buffers].length); buffers[n_buffers].start = mmap(NULL /* start anywhere */, buf.length, PROT_READ | PROT_WRITE /* required */, MAP_SHARED /* recommended */, fd, buf.m.offset); if (MAP_FAILED == buffers[n_buffers].start) errno_exit("mmap"); } } static void init_userp(unsigned int buffer_size) { struct v4l2_requestbuffers req; CLEAR(req); req.count = 4; req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; req.memory = V4L2_MEMORY_USERPTR; if (-1 == xioctl(fd, VIDIOC_REQBUFS, &req)) { if (EINVAL == errno) { fprintf(stderr, "%s does not support " "user pointer i/o\n", dev_name); exit(EXIT_FAILURE); } else { errno_exit("VIDIOC_REQBUFS"); } } buffers = calloc(4, sizeof(*buffers)); if (!buffers) { fprintf(stderr, "Out of memory\n"); exit(EXIT_FAILURE); } for (n_buffers = 0; n_buffers < 4; ++n_buffers) { buffers[n_buffers].length = buffer_size; buffers[n_buffers].start = malloc(buffer_size); if (!buffers[n_buffers].start) { fprintf(stderr, "Out of memory\n"); exit(EXIT_FAILURE); } } } /* five operations * step1 : cap :query camera's capability and check it(is a video device? is it support read? is it support streaming?) * step2 : cropcap:set cropcap's type and get cropcap by VIDIOC_CROPCAP * step3 : set crop parameter by VIDIOC_S_CROP (such as frame type and angle) * step4 : set fmt * step5 : mmap */ static void init_device(void) { struct v4l2_capability cap; struct v4l2_cropcap cropcap; struct v4l2_crop crop; struct v4l2_format fmt; unsigned int min; if (-1 == xioctl(fd, VIDIOC_QUERYCAP, &cap)) { if (EINVAL == errno) { fprintf(stderr, "%s is no V4L2 device\n", dev_name); exit(EXIT_FAILURE); } else { errno_exit("VIDIOC_QUERYCAP"); } } if (!(cap.capabilities & V4L2_CAP_VIDEO_CAPTURE)) { fprintf(stderr, "%s is no video capture device\n", dev_name); exit(EXIT_FAILURE); } switch (io) { case IO_METHOD_READ: if (!(cap.capabilities & V4L2_CAP_READWRITE)) { fprintf(stderr, "%s does not support read i/o\n", dev_name); exit(EXIT_FAILURE); } break; case IO_METHOD_MMAP: case IO_METHOD_USERPTR: if (!(cap.capabilities & V4L2_CAP_STREAMING)) { fprintf(stderr, "%s does not support streaming i/o\n", dev_name); exit(EXIT_FAILURE); } break; } /* Select video input, video standard and tune here. */ CLEAR(cropcap); cropcap.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; /* if device support cropcap's type then set crop */ if (0 == xioctl(fd, VIDIOC_CROPCAP, &cropcap)) { crop.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; crop.c = cropcap.defrect; /* reset to default */ if (-1 == xioctl(fd, VIDIOC_S_CROP, &crop)) { switch (errno) { case EINVAL: /* Cropping not supported. */ break; default: /* Errors ignored. */ break; } } } else { /* Errors ignored. */ } CLEAR(fmt); fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; if (force_format) { fmt.fmt.pix.width = 640; fmt.fmt.pix.height = 480; fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV; fmt.fmt.pix.field = V4L2_FIELD_INTERLACED; printf("set %d*%d YUYV format\n", fmt.fmt.pix.width, fmt.fmt.pix.height); if (-1 == xioctl(fd, VIDIOC_S_FMT, &fmt)) errno_exit("VIDIOC_S_FMT"); /* Note VIDIOC_S_FMT may change width and height. */ } else { /* Preserve original settings as set by v4l2-ctl for example */ if (-1 == xioctl(fd, VIDIOC_G_FMT, &fmt)) errno_exit("VIDIOC_G_FMT"); } /* Buggy driver paranoia. */ min = fmt.fmt.pix.width * 2; if (fmt.fmt.pix.bytesperline < min) fmt.fmt.pix.bytesperline = min; min = fmt.fmt.pix.bytesperline * fmt.fmt.pix.height; if (fmt.fmt.pix.sizeimage < min) fmt.fmt.pix.sizeimage = min; switch (io) { case IO_METHOD_READ: init_read(fmt.fmt.pix.sizeimage); break; case IO_METHOD_MMAP: init_mmap(); break; case IO_METHOD_USERPTR: init_userp(fmt.fmt.pix.sizeimage); break; } } /* * close (fd) */ static void close_device(void) { if (-1 == close(fd)) errno_exit("close"); fd = -1; } /* three operations * step 1 : check dev_name and st_mode * step 2 : open(device) */ static void open_device(void) { struct stat st; if (-1 == stat(dev_name, &st)) { fprintf(stderr, "Cannot identify '%s': %d, %s\n", dev_name, errno, strerror(errno)); exit(EXIT_FAILURE); } if (!S_ISCHR(st.st_mode)) { fprintf(stderr, "%s is no device\n", dev_name); exit(EXIT_FAILURE); } fd = open(dev_name, O_RDWR /* required */ | O_NONBLOCK, 0); if (-1 == fd) { fprintf(stderr, "Cannot open '%s': %d, %s\n", dev_name, errno, strerror(errno)); exit(EXIT_FAILURE); } } static void usage(FILE *fp, int argc, char **argv) { fprintf(fp, "Usage: %s [options]\n\n" "Version 1.3\n" "Options:\n" "-d | --device name Video device name [%s]\n" "-h | --help Print this message\n" "-m | --mmap Use memory mapped buffers [default]\n" "-r | --read Use read() calls\n" "-u | --userp Use application allocated buffers\n" "-o | --output Outputs stream to stdout\n" "-f | --format Force format to 640x480 YUYV\n" "-c | --count Number of frames to grab [%i]\n" "", argv[0], dev_name, frame_count); } static const char short_options[] = "d:hmruofc:"; static const struct option long_options[] = { { "device", required_argument, NULL, 'd' }, { "help", no_argument, NULL, 'h' }, { "mmap", no_argument, NULL, 'm' }, { "read", no_argument, NULL, 'r' }, { "userp", no_argument, NULL, 'u' }, { "output", no_argument, NULL, 'o' }, { "format", no_argument, NULL, 'f' }, { "count", required_argument, NULL, 'c' }, { 0, 0, 0, 0 } }; int main(int argc, char **argv) { dev_name = "/dev/video0"; for (;;) { int idx; int c; c = getopt_long(argc, argv, short_options, long_options, &idx); if (-1 == c) break; switch (c) { case 0: /* getopt_long() flag */ break; case 'd': dev_name = optarg; break; case 'h': usage(stdout, argc, argv); exit(EXIT_SUCCESS); case 'm': io = IO_METHOD_MMAP; break; case 'r': io = IO_METHOD_READ; break; case 'u': io = IO_METHOD_USERPTR; break; case 'o': out_buf++; break; case 'f': force_format++; break; case 'c': errno = 0; frame_count = strtol(optarg, NULL, 0); if (errno) errno_exit(optarg); break; default: usage(stderr, argc, argv); exit(EXIT_FAILURE); } } open_device(); init_device(); start_capturing(); mainloop(); stop_capturing(); uninit_device(); close_device(); fprintf(stderr, "\n"); return 0; }
/ # ./a.out -f
set 640*480 YUYV format
buffers[0].length=614400
buffers[1].length=614400
buffers[2].length=614400
buffers[3].length=614400
....
/ # sz yuyv2.yuv
用图片查看器“RawImageViewer.exe” :(由于我的摄像头配置成扫码模式 所以是黑白图)

新增YUV分布存储数据示例:
/* https://blog.csdn.net/li_wen01/article/details/53557949 */
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
#include <sys/ioctl.h>
#include <stdlib.h>
#include <linux/types.h>
#include <linux/videodev2.h>
#include <malloc.h>
#include <math.h>
#include <string.h>
#include <sys/mman.h>
#include <errno.h>
#include <assert.h>
#define FILE_VIDEO "/dev/video0"
unsigned char* video_path;
#define IMG_PATH "./image%d.yuv"
#define IMG_NUM 8
struct user_img{
void *start;
int length;
};
struct user_img *usr_buf;
static unsigned int n_buffer = 0;
static unsigned int nplanes;
int init_mmap(int fd)
{
int i;
struct v4l2_requestbuffers reqbufs;
struct v4l2_buffer buf;
memset(&reqbufs, 0, sizeof(reqbufs));
reqbufs.count = IMG_NUM;
reqbufs.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
reqbufs.memory = V4L2_MEMORY_MMAP;
/* VIDIOC_REQBUFS: frame buffer alloc by kernel and tell userspace how many frames had alloc */
if(-1 == ioctl(fd,VIDIOC_REQBUFS,&reqbufs)) {
printf("Fail to ioctl 'VIDIOC_REQBUFS'");
exit(EXIT_FAILURE);
}
n_buffer = reqbufs.count;
printf("n_buffer = %d\n", n_buffer);
usr_buf = calloc(reqbufs.count, sizeof(struct user_img));
if(usr_buf == NULL) {
printf("Out of memory\n");
exit(-1);
}
/*map kernel frame buffer to user process*/
for(i = 0; i < n_buffer; ++i) {
memset(&buf, 0, sizeof(buf));
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = i;
struct v4l2_plane planes[VIDEO_MAX_PLANES];
memset(planes, 0, VIDEO_MAX_PLANES * sizeof(struct v4l2_plane));
/* when type=V4L2_BUF_TYPE_VIDEO_CAPTURE, length means frame size
* when type=V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE, length means how many planes */
buf.length = nplanes;
buf.m.planes = planes;
/* VIDIOC_QUERYBUF: get the frame buffer size and physical address since we need it mmmap to userspace */
if(-1 == ioctl(fd,VIDIOC_QUERYBUF,&buf))
{
printf("Fail to ioctl : VIDIOC_QUERYBUF");
exit(EXIT_FAILURE);
}
/* FIXME: usr_buf[0].start=frame addr but not planes[0].m.mem_offset
* usr_buf[0].start = planes[0].m.mem_offset + planes[1].m.mem_offset + ... planes[nplanes-1].m.mem_offset
* in this case nplanes=1, So frame buffer has only 1 plane
*/
usr_buf[i].length = buf.m.planes[0].length;
usr_buf[i].start = (char *)mmap(NULL,buf.m.planes[0].length,PROT_READ | PROT_WRITE,MAP_SHARED, fd, buf.m.planes[0].m.mem_offset);
printf("fuzk index[%d] length=%d, phyaddr=%p, virtaddr=%p\n",
buf.index, usr_buf[i].length, buf.m.planes[0].m.mem_offset, usr_buf[i].start);
if(MAP_FAILED == usr_buf[i].start) {
printf("Fail to mmap");
exit(EXIT_FAILURE);
}
if(-1 == ioctl(fd, VIDIOC_QBUF, &buf)) {
printf("Fail to ioctl 'VIDIOC_QBUF'");
exit(EXIT_FAILURE);
}
}
}
int open_camera(void)
{
int fd;
struct v4l2_input inp;
fd = open(FILE_VIDEO, O_RDWR | O_NONBLOCK,0);
if(fd < 0) {
printf("%s open err \n", FILE_VIDEO);
exit(EXIT_FAILURE);
}
/* must act VIDIOC_S_INPUT otherwise select will timeout */
inp.index = 1;
if (-1 == ioctl (fd, VIDIOC_S_INPUT, &inp)) {
printf("VIDIOC_S_INPUT fail\n");
}
return fd;
}
int init_camera(int fd)
121 {
122 struct v4l2_capability cap;
123 struct v4l2_format tv_fmt;
124 struct v4l2_fmtdesc fmtdesc;
125 struct v4l2_control ctrl;
126 int ret;
127 int i;
128
129
130 /* check video decive driver capability */
131 if(ret=ioctl(fd, VIDIOC_QUERYCAP, &cap)<0) {
132 printf("fail to ioctl VIDEO_QUERYCAP \n");
133 exit(EXIT_FAILURE);
134 }
135
136 /*judge wherher or not to be a video-get device, some driver forget add to this support list */
137 if(!(cap.capabilities & V4L2_BUF_TYPE_VIDEO_CAPTURE)){
138 printf("The Current device is not a video capture device \n");
139 }
140 if(!(cap.capabilities & V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE)) {
141 printf("The Current device is not V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE\n");
142 }
143
144 /*judge whether or not to supply the form of video stream*/
145 if(!(cap.capabilities & V4L2_CAP_STREAMING))
145 if(!(cap.capabilities & V4L2_CAP_STREAMING))
146 {
147 printf("The Current device does not support streaming i/o\n");
148 exit(EXIT_FAILURE);
149 }
150
151 printf("\ncamera driver name is : %s\n",cap.driver);
152 printf("camera device name is : %s\n",cap.card);
153 printf("camera bus information: %s\n",cap.bus_info);
154
155 /*display the format device support*/
156 memset(&fmtdesc, 0, sizeof(fmtdesc));
157 fmtdesc.index = 0 ; /* the number to check */
158 fmtdesc.type=V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
159
160 printf("find V4L2_PIX_FMT_NV21 0x%x\n", V4L2_PIX_FMT_NV21);
161 for (int i = 0; i < 12; i++) {
162 fmtdesc.index = i;
163 if (-1 == ioctl(fd, VIDIOC_ENUM_FMT, &fmtdesc)) {
164 break;
165 }
166 printf("format index = %d, name = %s, v4l2 pixel format = %x\n",
167 i, fmtdesc.description, fmtdesc.pixelformat);
168 }
169 printf("\n");
170
171 /*set the form of camera capture data*/
172 tv_fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
173 tv_fmt.fmt.pix_mp.width = 1280;
174 tv_fmt.fmt.pix_mp.height = 720;
175 /* vidioc_try_fmt_vid_cap_mplane() */
176 tv_fmt.fmt.pix_mp.pixelformat = V4L2_PIX_FMT_NV21;
177 tv_fmt.fmt.pix_mp.field = V4L2_FIELD_NONE;
178 if(ioctl(fd, VIDIOC_S_FMT, &tv_fmt)< 0) {
179 printf("VIDIOC_S_FMT set err\n");
180 close(fd);
181 exit(-1);
182 }
183
184 if(ioctl(fd, VIDIOC_G_FMT, &tv_fmt) < 0) {
185 printf("VIDIOC_G_FMT get err\n");
186 close(fd);
187 exit(-1);
188 } else {
189 nplanes = tv_fmt.fmt.pix_mp.num_planes;
190 printf("VIDIOC_G_FMT resolution = %d*%d num_planes = %d\n", tv_fmt.fmt.pix_mp.width,
191 tv_fmt.fmt.pix_mp.height, tv_fmt.fmt.pix_mp.num_planes);
192 }
193
194 init_mmap(fd);
195 }
196
197 int start_capture(int fd)
198 {
199 enum v4l2_buf_type type;
200
201
202 type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
203 if(-1 == ioctl(fd, VIDIOC_STREAMON, &type)) {
204 printf("VIDIOC_STREAMON");
205 close(fd);
206 exit(EXIT_FAILURE);
207 }
208
209 return 0;
210 }
211
212 int process_image(void *addr, int length)
213 {
214 FILE *fp;
215
216 static int num = 0;
217
218 char image_name[20];
219 sprintf(image_name, IMG_PATH, num++);
220 if((fp = fopen(image_name, "w")) == NULL)
221 {
222 printf("Fail to fopen");
223 exit(EXIT_FAILURE);
224 }
225 fwrite(addr, length, 1, fp);
226 usleep(500);
227 fclose(fp);
228 return 0;
229 }
230
231 int read_frame(int fd)
232 {
233 struct v4l2_buffer buf;
234 unsigned int i;
235 struct v4l2_plane planes[VIDEO_MAX_PLANES];
236
237 memset(&buf, 0, sizeof(buf));
238 buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
239 buf.memory = V4L2_MEMORY_MMAP;
240 buf.length = nplanes;
241 buf.m.planes = planes;
242
243 if(-1 == ioctl(fd, VIDIOC_DQBUF,&buf)) {
244 printf("Fail to ioctl 'VIDIOC_DQBUF'");
245 exit(EXIT_FAILURE);
246 }
247
248 assert(buf.index < n_buffer);
249
250 process_image(usr_buf[buf.index].start, usr_buf[buf.index].length);
251 if(-1 == ioctl(fd, VIDIOC_QBUF,&buf)) {
252 printf("Fail to ioctl 'VIDIOC_QBUF'");
253 exit(EXIT_FAILURE);
254 }
255 return 1;
256 }
257
258
259 int mainloop(int fd)
260 {
261 int count = 10;
262 while(count-- > 0) {
263 for(;;) {
264 fd_set fds;
265 struct timeval tv;
266 int r;
267
268 FD_ZERO(&fds);
269 FD_SET(fd,&fds);
270
271 /*Timeout*/
272 tv.tv_sec = 5;
273 tv.tv_usec = 0;
274 r = select(fd + 1,&fds,NULL,NULL,&tv);
275
276 if(-1 == r) {
277 if(EINTR == errno)
278 continue;
279 printf("Fail to select");
280 exit(EXIT_FAILURE);
281 }
282 if(0 == r)
283 {
284 printf("select Timeout\n");
285 exit(-1);
286 }
287
288 if(read_frame(fd))
289 break;
290 }
291 }
292 return 0;
293 }
294
295 void stop_capture(int fd)
296 {
297 enum v4l2_buf_type type;
298 type = V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE;
299 if(-1 == ioctl(fd,VIDIOC_STREAMOFF,&type)) {
300 printf("Fail to ioctl 'VIDIOC_STREAMOFF'");
301 exit(EXIT_FAILURE);
302 }
303 }
304
305 void close_camera_device(int fd)
306 {
307 unsigned int i;
308 for(i = 0; i < n_buffer; i++)
309 {
310 if(-1 == munmap(usr_buf[i].start, usr_buf[i].length))
311 {
312 exit(-1);
313 }
314 }
315
316 free(usr_buf);
317
318 if(-1 == close(fd))
319 {
320 printf("Fail to close fd");
321 exit(EXIT_FAILURE);
322 }
323 }
324
325
326 void main(int argc, char *argv[])
327 {
328 int fd;
329 video_path = FILE_VIDEO;
330 if(argc > 2) {
331 video_path = argv[1];
332 printf("camera path: %s\n", video_path);
333 }
334 fd = open_camera();
335 init_camera(fd);
336 start_capture(fd);
337 mainloop(fd);
338 stop_capture(fd);
339 close_camera_device(fd);
340 }

