

Deep learning:三十七(Deep learning中的优化方法)
内容:
本文主要是参考论文:On optimization methods for deep learning,文章内容主要是笔记SGD(随机梯度下降),LBFGS(受限的BFGS),CG(共轭梯度法)三种常见优化算法的在deep learning体系中的性能。下面是一些读完的笔记。
SGD优点:实现简单,当训练样本足够多时优化速度非常快。
SGD缺点:需要人为调整很多参数,比如学习率,收敛准则等。另外,它是序列的方法,不利于GPU并行或分布式处理。
各种deep learning中常见方法(比如说Autoencoder,RBM,DBN,ICA,Sparse coding)的区别是:目标函数形式不同。这其实才是最本质的区别,由于目标函数的不同导致了对其优化的方法也可能会不同,比如说RBM中目标函数跟网络能量有关,采用CD优化的,而Autoencoder目标函数为理论输出和实际输出的MSE,由于此时的目标函数的偏导可以直接被计算,所以可以用LBFGS,CG等方法优化,其它的类似。所以不能单从网络的结构来判断其属于Deep learning中的哪种方法,比如说我单独给定64-100的2层网络,你就无法知道它属于deep learning中的哪一种方法,因为这个网络既可以用RBM也可以用Autoencoder来训练。
作者通过实验得出的结论是:不同的优化算法有不同的优缺点,适合不同的场合,比如LBFGS算法在参数的维度比较低(一般指小于10000维)时的效果要比SGD(随机梯度下降)和CG(共轭梯度下降)效果好,特别是带有convolution的模型。而针对高维的参数问题,CG的效果要比另2种好。也就是说一般情况下,SGD的效果要差一些,这种情况在使用GPU加速时情况一样,即在GPU上使用LBFGS和CG时,优化速度明显加快,而SGD算法优化速度提高很小。在单核处理器上,LBFGS的优势主要是利用参数之间的2阶近视特性来加速优化,而CG则得得益于参数之间的共轭信息,需要计算器Hessian矩阵。
不过当使用一个大的minibatch且采用线搜索的话,SGD的优化性能也会提高。
在单核上比较SGD,LBFGS,CG三种算法的优化性能,当针对Autoencoder模型。结果如下:
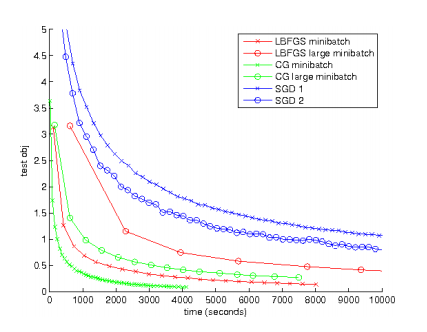
可以看出,SGD效果最差。
同样的情况下,训练的是Sparse autoencoder模型的比较情况如下:
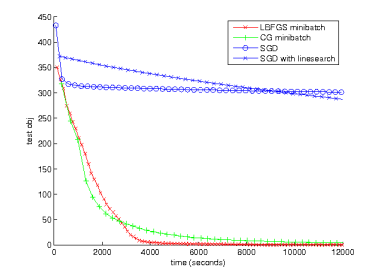
这时SGD的效果更差。这主要原因是LBFGS和CG能够使用大的minibatch数据来估算每个节点的期望激发值,这个值是可以用来约束该节点的稀疏特性的,而SGD需要去估计噪声信息。
当然了作者还有在GUP,convolution上也做了不少实验。
最后,作者训练了一个2隐含层(这2层不算pooling层)的Sparse autocoder网络,并应用于MNIST上,其识别率结果如下:

作者网站上给出了一些code,见deep autoencoder with L-BFGS。看着标题本以为code会实现deep convolution autoencoder pre-training和fine-tuning的,因为作者paper里面用的是convolution,阅读完code后发现其实现就是一个普通二层的autoencoder。看来还是得到前面博文第二个问题的答案:Deep learning:三十六(关于构建深度卷积SAE网络的一点困惑)。
下面是作者code主要部分的一些注释:
optimizeAutoencoderLBFGS.m(实现deep autoencoder网络的参数优化过程):
function [] = optimizeAutoencoderLBFGS(layersizes, datasetpath, ... finalObjective) % train a deep autoencoder with variable hidden sizes % layersizes : the sizes of the hidden layers. For istance, specifying layersizes = % [200 100] will create a network looks like input -> 200 -> 100 -> 200 % -> output (same size as input). Notice the mirroring structure of the % autoencoders. Default layersizes = [2*3072 100] % datasetpath: the path to the CIFAR dataset (where we find the *.mat % files). see loadData.m % finalObjective: the final objective that you use to compare to % terminate your optimization. To qualify, the objective % function on the entire training set must be below this % value. % % Author: Quoc V. Le (quocle@stanford.edu) % %% Handle default parameters if nargin < 3 || isempty(finalObjective) finalObjective = 70; % i am just making this up, the evaluation objective % will be much lower end if nargin < 2 || isempty(datasetpath) datasetpath = '.'; end if nargin < 1 || isempty(layersizes) layersizes = [2*3072 100]; layersizes = [200 100]; end %% Load data loadData %traindata 3072*10000的,每一列表示一个向量 %% Random initialization initializeWeights;%看作者对应该部分的code,也没有感觉出convolution和pooling的影响啊,怎么它就连接起来了呢 %% Optimization: minibatch L-BFGS % Q.V. Le, J. Ngiam, A. Coates, A. Lahiri, B. Prochnow, A.Y. Ng. % On optimization methods for deep learning. ICML, 2011 addpath minFunc/ options.Method = 'lbfgs'; options.maxIter = 20; options.display = 'on'; options.TolX = 1e-3; perm = randperm(size(traindata,2)); traindata = traindata(:,perm);% 将训练样本随机排列 batchSize = 1000;%因为总共样本数为10000个,所以分成了10个批次 maxIter = 20; for i=1:maxIter startIndex = mod((i-1) * batchSize, size(traindata,2)) + 1; fprintf('startIndex = %d, endIndex = %d\n', startIndex, startIndex + batchSize-1); data = traindata(:, startIndex:startIndex + batchSize-1); [theta, obj] = minFunc( @deepAutoencoder, theta, options, layersizes, ... data); if obj <= finalObjective % use the minibatch obj as a heuristic for stopping % because checking the entire dataset is very % expensive % yes, we should check the objective for the entire training set trainError = deepAutoencoder(theta, layersizes, traindata); if trainError <= finalObjective % now your submission is qualified break end end end %% write to text files so that we can test your program writeToTextFiles;
deepAutoencoder.m:(深度网络代价函数及其导数的求解函数):
function [cost,grad] = deepAutoencoder(theta, layersizes, data) % cost and gradient of a deep autoencoder % layersizes is a vector of sizes of hidden layers, e.g., % layersizes[2] is the size of layer 2 % this does not count the visible layer % data is the input data, each column is an example % the activation function of the last layer is linear, the activation % function of intermediate layers is the hyperbolic tangent function % WARNING: the code is optimized for ease of implemtation and % understanding, not speed nor space %% FORCING THETA TO BE IN MATRIX FORMAT FOR EASE OF UNDERSTANDING % Note that this is not optimized for space, one can just retrieve W and b % on the fly during forward prop and backprop. But i do it here so that the % readers can understand what's going on layersizes = [size(data,1) layersizes]; l = length(layersizes); lnew = 0; for i=1:l-1 lold = lnew + 1; lnew = lnew + layersizes(i) * layersizes(i+1); W{i} = reshape(theta(lold:lnew), layersizes(i+1), layersizes(i)); lold = lnew + 1; lnew = lnew + layersizes(i+1); b{i} = theta(lold:lnew); end % handle tied-weight stuff j = 1; for i=l:2*(l-1) lold = lnew + 1; lnew = lnew + layersizes(l-j); W{i} = W{l - j}'; %直接用encoder中对应的转置即可 b{i} = theta(lold:lnew); j = j + 1; end assert(lnew == length(theta), 'Error: dimensions of theta and layersizes do not match\n') %% FORWARD PROP for i=1:2*(l-1)-1 if i==1 [h{i} dh{i}] = tanhAct(bsxfun(@plus, W{i}*data, b{i})); else [h{i} dh{i}] = tanhAct(bsxfun(@plus, W{i}*h{i-1}, b{i})); end end h{i+1} = linearAct(bsxfun(@plus, W{i+1}*h{i}, b{i+1})); %% COMPUTE COST diff = h{i+1} - data; M = size(data,2); cost = 1/M * 0.5 * sum(diff(:).^2);% 纯粹标准的autoencoder,不加其它比如sparse限制 %% BACKPROP if nargout > 1 outderv = 1/M * diff; for i=2*(l-1):-1:2 Wgrad{i} = outderv * h{i-1}'; bgrad{i} = sum(outderv,2); outderv = (W{i}' * outderv) .* dh{i-1}; end Wgrad{1} = outderv * data'; bgrad{1} = sum(outderv,2); % handle tied-weight stuff j = 1; for i=l:2*(l-1) Wgrad{l-j} = Wgrad{l-j} + Wgrad{i}'; j = j + 1; end % dump the results to the grad vector grad = zeros(size(theta)); lnew = 0; for i=1:l-1 lold = lnew + 1; lnew = lnew + layersizes(i) * layersizes(i+1); grad(lold:lnew) = Wgrad{i}(:); lold = lnew + 1; lnew = lnew + layersizes(i+1); grad(lold:lnew) = bgrad{i}(:); end j = 1; for i=l:2*(l-1) lold = lnew + 1; lnew = lnew + layersizes(l-j); grad(lold:lnew) = bgrad{i}(:); j = j + 1; end end end %% USEFUL ACTIVATION FUNCTIONS function [a da] = sigmoidAct(x) a = 1 ./ (1 + exp(-x)); if nargout > 1 da = a .* (1-a); end end function [a da] = tanhAct(x) a = tanh(x); if nargout > 1 da = (1-a) .* (1+a); end end function [a da] = linearAct(x) a = x; if nargout > 1 da = ones(size(a)); end end
initializeWeights.m(参数初始化赋值,虽然是随机,但是有一定要求):
%% Random initialization % X. Glorot, Y. Bengio. % Understanding the dif铿乧ulty of training deep feedforward neural networks. % AISTATS 2010. % QVL: this initialization method appears to perform better than % theta = randn(d,1); s0 = size(traindata,1);% s0涓烘牱鏈殑缁存暟 layersizes = [s0 layersizes];%输入层-hidden1-hidden2,这里是3072-6144-100 l = length(layersizes);%缃戠粶涓殑灞傛暟锛屼笉鍖呭惈瑙g爜閮ㄥ垎锛屽鏋滄槸2涓殣鍚眰鐨勮瘽锛岃繖閲宭=3 lnew = 0; for i=1:l-1%1到3之间 lold = lnew + 1; lnew = lnew + layersizes(i) * layersizes(i+1); r = sqrt(6) / sqrt(layersizes(i+1)+layersizes(i)); A = rand(layersizes(i+1), layersizes(i))*2*r - r; %reshape(theta(lold:lnew), layersizes(i+1), layersizes(i)); theta(lold:lnew) = A(:); %相当于权值W的赋值 lold = lnew + 1; lnew = lnew + layersizes(i+1); A = zeros(layersizes(i+1),1); theta(lold:lnew) = A(:);%相当于偏置值b的赋值 end %以上是encoder部分 j = 1; for i=l:2*(l-1) %1到4之间,下面开始decoder部分 lold = lnew + 1; lnew = lnew + layersizes(l-j); theta(lold:lnew)= zeros(layersizes(l-j),1); j = j + 1; end theta = theta'; layersizes = layersizes(2:end); %去除输入层
参考资料:
Le, Q. V., et al. (2011). On optimization methods for deep learning. Proc. of ICML.
Deep learning:三十六(关于构建深度卷积SAE网络的一点困惑)

