相机位姿估计1_1:OpenCV:solvePnP二次封装与性能测试
关键词:OpenCV::solvePnP
文章类型:方法封装、测试
@Author:VShawn(singlex@foxmail.com)
@Date:2016-11-27
@Lab: CvLab202@CSU
前言
今天给大家带来的是一篇关于程序功能、性能测试的文章,读过《相机位姿估计1:根据四个特征点估计相机姿态》一文的同学应该会发现,直接使用OpenCV的solvePnP来估计相机位姿,在程序调用上相当麻烦,从一开始的参数设定到最后将计算出的矩阵转化为相机的位姿参数,需要花费近两百行代码。因此为了更方便地调用程序,今天我就给大家带来一个我自己对solvePnP的封装类PNPSolver,顺便将OpenCV自带的三种求解方法测试一遍。
类的封装
封装的思路我就不写了,由于博客更新速度赶不上我写程序的速度,现在发上来的类已经修改过好几次了,思路也换了几次。不过大的方向没变,目的就是只需要输入参数,输入坐标点后直接可以得到相机在世界坐标系的坐标。
类的调用顺序:
1.初始化PNPSolver类;
2.调用SetCameraMatrix(),SetDistortionCoefficients()设置好相机内参数与镜头畸变参数;
3.向Points3D,Points2D中添加一一对应的特征点对;
4.调用Solve()方法运行计算;
5.从属性Theta_C2W中提取旋转角,从Position_OcInW中提取出相机在世界坐标系下的坐标。
以下是类体:
PNPSolver.h
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 | #pragma once#include <opencv2\opencv.hpp>#include <math.h>#include <iostream>#include <fstream>using namespace std;// 本类用于快速解决PNP问题,顺带解决空间绕轴旋转以及图像系、相机系、世界系三系坐标投影问题// 默认使用Gao的P3P+重投影法,要求输入4个特征点// 调用顺序:// 1.初始化本类// 2.调用SetCameraMatrix(),SetDistortionCoefficients()设置好相机内参数与镜头畸变参数// 3.向Points3D,Points2D中添加一一对应的特征点对// 4.调用Solve()方法运行计算// 5.从RoteM, TransM, W2CTheta等属性中提出结果//// 原理参见:http://www.cnblogs.com/singlex/category/911880.html// Author:VShawn// Ver:2016.11.25.0class PNPSolver{public: PNPSolver(); //带参数初始化 PNPSolver(double fx, double fy, double u0, double v0, double k_1, double k_2, double p_1, double p_2, double k_3); ~PNPSolver(); enum METHOD { CV_ITERATIVE = CV_ITERATIVE, CV_P3P = CV_P3P, CV_EPNP = CV_EPNP }; /***********************位姿估计所用特征点**************************/ vector<cv::Point3f> Points3D;//存储四个点的世界坐标 vector<cv::Point2f> Points2D;//存储四个点的图像坐标 /***********************位姿估计结果**************************/ //最后求出的旋转矩阵与平移矩阵 cv::Mat RoteM, TransM; //世界系到相机系的三轴旋转欧拉角,世界系照此旋转后可以与相机坐标系完全平行。 //旋转顺序为x、y、z cv::Point3f Theta_W2C; //相机系到世界系的三轴旋转欧拉角,相机坐标系照此旋转后可以与世界坐标系完全平行。 //旋转顺序为z、y、x cv::Point3f Theta_C2W; //相机坐标系中,世界坐标系原点Ow的坐标 cv::Point3f Position_OwInC; //世界坐标系中,相机坐标系原点Oc的坐标 cv::Point3f Position_OcInW; /*********************公有方法*****************************/ //解PNP问题,获得位姿信息 //调用后在RoteM, TransM, W2CTheta等属性中提取计算结果,属性说明参见注释 //输出参数:CV_ITERATIVE,CV_P3P(默认),CV_EPNP,具体参见Opencv documentation. //实测 //CV_ITERATIVE迭代法似乎只能用4个共面特征点求解,5个点或非共面4点解不出正确的解 //CV_P3P的Gao的方法可以使用任意四个特征点,特征点数量不能少于4也不能多于4 //CV_EPNP方法可以实现特征点数>=4的问题求解,不需要4点共面 //返回值: //0正确 //-1相机内参数或畸变参数未设置 //-2未提供足够的特征点,或特征点数目不匹配 //-3输入的点数据有误,详见printf信息 int Solve(METHOD method = METHOD::CV_P3P); //根据计算出的结果将世界坐标重投影到图像,返回像素坐标点集 //使用前需要先用Solve()解出相机位姿 //输入为世界坐标系的点坐标集合 //输出为点投影到图像上的图像坐标集合 vector<cv::Point2f> WordFrame2ImageFrame(vector<cv::Point3f> WorldPoints); //根据输入的参数将图像坐标转换到相机坐标中 //使用前需要先用Solve()解出相机位姿 //输入为图像上的点坐标 //double F为镜头焦距 //输出为点在焦距=F时的相机坐标系坐标 cv::Point3f ImageFrame2CameraFrame(cv::Point2f p, double F); //设置相机内参数矩阵 void SetCameraMatrix(double fx, double fy, double u0, double v0) { camera_matrix = cv::Mat(3, 3, CV_64FC1, cv::Scalar::all(0)); camera_matrix.ptr<double>(0)[0] = fx; camera_matrix.ptr<double>(0)[2] = u0; camera_matrix.ptr<double>(1)[1] = fy; camera_matrix.ptr<double>(1)[2] = v0; camera_matrix.ptr<double>(2)[2] = 1.0f; } //设置畸变系数矩阵 void SetDistortionCoefficients(double k_1, double k_2, double p_1, double p_2, double k_3) { distortion_coefficients = cv::Mat(5, 1, CV_64FC1, cv::Scalar::all(0)); distortion_coefficients.ptr<double>(0)[0] = k_1; distortion_coefficients.ptr<double>(1)[0] = k_2; distortion_coefficients.ptr<double>(2)[0] = p_1; distortion_coefficients.ptr<double>(3)[0] = p_2; distortion_coefficients.ptr<double>(4)[0] = k_3; } /********************公有静态方法*********************/ //点绕任意向量旋转,右手系 static cv::Point3f RotateByVector(double old_x, double old_y, double old_z, double vx, double vy, double vz, double theta) { double r = theta * CV_PI / 180; double c = cos(r); double s = sin(r); double new_x = (vx*vx*(1 - c) + c) * old_x + (vx*vy*(1 - c) - vz*s) * old_y + (vx*vz*(1 - c) + vy*s) * old_z; double new_y = (vy*vx*(1 - c) + vz*s) * old_x + (vy*vy*(1 - c) + c) * old_y + (vy*vz*(1 - c) - vx*s) * old_z; double new_z = (vx*vz*(1 - c) - vy*s) * old_x + (vy*vz*(1 - c) + vx*s) * old_y + (vz*vz*(1 - c) + c) * old_z; return cv::Point3f(new_x, new_y, new_z); } //将空间点绕Z轴旋转 //输入参数 x y为空间点原始x y坐标 //thetaz为空间点绕Z轴旋转多少度,角度制范围在-180到180 //outx outy为旋转后的结果坐标 static void CodeRotateByZ(double x, double y, double thetaz, double& outx, double& outy) { double x1 = x;//将变量拷贝一次,保证&x == &outx这种情况下也能计算正确 double y1 = y; double rz = thetaz * CV_PI / 180; outx = cos(rz) * x1 - sin(rz) * y1; outy = sin(rz) * x1 + cos(rz) * y1; } //将空间点绕Y轴旋转 //输入参数 x z为空间点原始x z坐标 //thetay为空间点绕Y轴旋转多少度,角度制范围在-180到180 //outx outz为旋转后的结果坐标 static void CodeRotateByY(double x, double z, double thetay, double& outx, double& outz) { double x1 = x; double z1 = z; double ry = thetay * CV_PI / 180; outx = cos(ry) * x1 + sin(ry) * z1; outz = cos(ry) * z1 - sin(ry) * x1; } //将空间点绕X轴旋转 //输入参数 y z为空间点原始y z坐标 //thetax为空间点绕X轴旋转多少度,角度制,范围在-180到180 //outy outz为旋转后的结果坐标 static void CodeRotateByX(double y, double z, double thetax, double& outy, double& outz) { double y1 = y;//将变量拷贝一次,保证&y == &y这种情况下也能计算正确 double z1 = z; double rx = thetax * CV_PI / 180; outy = cos(rx) * y1 - sin(rx) * z1; outz = cos(rx) * z1 + sin(rx) * y1; }private: cv::Mat camera_matrix;//内参数矩阵 cv::Mat distortion_coefficients;//畸变系数 cv::Mat rvec;//解出来的旋转向量 cv::Mat tvec;//解出来的平移向量}; |
PNPSolver.cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 | #include "PNPSolver.h"// 本类用于快速解决PNP问题,顺带解决空间绕轴旋转以及图像系、相机系、世界系三系坐标投影问题// 调用顺序:// 1.初始化本类// 2.调用SetCameraMatrix(),SetDistortionCoefficients()设置好相机内参数与镜头畸变参数// 3.向Points3D,Points2D中添加一一对应的特征点对// 4.调用Solve()方法运行计算// 5.从RoteM, TransM, W2CTheta等属性中提出结果//// 原理参见:http://www.cnblogs.com/singlex/category/911880.html// Author:VShawn// Ver:2016.11.26.0PNPSolver::PNPSolver(){ //初始化输出矩阵 vector<double> rv(3), tv(3); cv::Mat rvec(rv), tvec(tv);}PNPSolver::PNPSolver(double fx, double fy, double u0, double v0, double k_1, double k_2, double p_1, double p_2, double k_3){ //初始化输出矩阵 vector<double> rv(3), tv(3); cv::Mat rvec(rv), tvec(tv); SetCameraMatrix(fx, fy, u0, v0); SetDistortionCoefficients(k_1, k_2, p_1, p_2, k_3);}PNPSolver::~PNPSolver(){}int PNPSolver::Solve(METHOD method){ //数据校验 if (camera_matrix.cols == 0 || distortion_coefficients.cols == 0) { printf("ErrCode:-1,相机内参数或畸变参数未设置!\r\n"); return -1; } if (Points3D.size() != Points2D.size()) { printf("ErrCode:-2,3D点数量与2D点数量不一致!\r\n"); return -2; } if (method == METHOD::CV_P3P || method == METHOD::CV_ITERATIVE) { if (Points3D.size() != 4) { printf("ErrCode:-2,使用CV_ITERATIVE或CV_P3P方法时输入的特征点数量应为4!\r\n"); return -2; } } else { if (Points3D.size() < 4) { printf("ErrCode:-2,输入的特征点数量应大于4!\r\n"); return -2; } } ////TODO::检验是否是共面的四点 //if ((method == METHOD::CV_ITERATIVE || method == METHOD::CV_EPNP) && Points2D.size() == 4) //{ // //通过向量两两叉乘获得法向量,看法向量是否平行 //} /*******************解决PNP问题*********************/ //有三种方法求解 solvePnP(Points3D, Points2D, camera_matrix, distortion_coefficients, rvec, tvec, false, method); //实测迭代法似乎只能用共面特征点求位置 //solvePnP(Points3D, Points2D, camera_matrix, distortion_coefficients, rvec, tvec, false, CV_ITERATIVE); //实测迭代法似乎只能用共面特征点求位置 //solvePnP(Points3D, Points2D, camera_matrix, distortion_coefficients, rvec, tvec, false, CV_P3P); //Gao的方法可以使用任意四个特征点 //solvePnP(Points3D, Points2D, camera_matrix, distortion_coefficients, rvec, tvec, false, CV_EPNP); /*******************提取旋转矩阵*********************/ double rm[9]; RoteM = cv::Mat(3, 3, CV_64FC1, rm); Rodrigues(rvec, RoteM); double r11 = RoteM.ptr<double>(0)[0]; double r12 = RoteM.ptr<double>(0)[1]; double r13 = RoteM.ptr<double>(0)[2]; double r21 = RoteM.ptr<double>(1)[0]; double r22 = RoteM.ptr<double>(1)[1]; double r23 = RoteM.ptr<double>(1)[2]; double r31 = RoteM.ptr<double>(2)[0]; double r32 = RoteM.ptr<double>(2)[1]; double r33 = RoteM.ptr<double>(2)[2]; TransM = tvec; //计算出相机坐标系的三轴旋转欧拉角,旋转后可以转出世界坐标系。 //旋转顺序为z、y、x double thetaz = atan2(r21, r11) / CV_PI * 180; double thetay = atan2(-1 * r31, sqrt(r32*r32 + r33*r33)) / CV_PI * 180; double thetax = atan2(r32, r33) / CV_PI * 180; //相机系到世界系的三轴旋转欧拉角,相机坐标系照此旋转后可以与世界坐标系完全平行。 //旋转顺序为z、y、x Theta_C2W.z = thetaz; Theta_C2W.y = thetay; Theta_C2W.x = thetax; //计算出世界系到相机系的三轴旋转欧拉角,世界系照此旋转后可以转出相机坐标系。 //旋转顺序为x、y、z Theta_W2C.x = -1 * thetax; Theta_W2C.y = -1 * thetay; Theta_W2C.z = -1 * thetaz; /*************************************此处计算出相机坐标系原点Oc在世界坐标系中的位置**********************************************/ /***********************************************************************************/ /* 当原始坐标系经过旋转z、y、x三次旋转后,与世界坐标系平行,向量OcOw会跟着旋转 */ /* 而我们想知道的是两个坐标系完全平行时,OcOw的值 */ /* 因此,原始坐标系每次旋转完成后,对向量OcOw进行一次反相旋转,最终可以得到两个坐标系完全平行时的OcOw */ /* 该向量乘以-1就是世界坐标系下相机的坐标 */ /***********************************************************************************/ //提出平移矩阵,表示从相机坐标系原点,跟着向量(x,y,z)走,就到了世界坐标系原点 double tx = tvec.ptr<double>(0)[0]; double ty = tvec.ptr<double>(0)[1]; double tz = tvec.ptr<double>(0)[2]; //x y z 为唯一向量在相机原始坐标系下的向量值 //也就是向量OcOw在相机坐标系下的值 double x = tx, y = ty, z = tz; Position_OwInC.x = x; Position_OwInC.y = y; Position_OwInC.z = z; //进行三次反向旋转 CodeRotateByZ(x, y, -1 * thetaz, x, y); CodeRotateByY(x, z, -1 * thetay, x, z); CodeRotateByX(y, z, -1 * thetax, y, z); //获得相机在世界坐标系下的位置坐标 //即向量OcOw在世界坐标系下的值 Position_OcInW.x = x*-1; Position_OcInW.y = y*-1; Position_OcInW.z = z*-1; return 0;}//根据计算出的结果将世界坐标重投影到图像,返回像素坐标点集//输入为世界坐标系的点坐标集合//输出为点投影到图像上的图像坐标集合vector<cv::Point2f> PNPSolver::WordFrame2ImageFrame(vector<cv::Point3f> WorldPoints){ vector<cv::Point2f> projectedPoints; cv::projectPoints(WorldPoints, rvec, tvec, camera_matrix, distortion_coefficients, projectedPoints); return projectedPoints;}//根据输入的参数将图像坐标转换到相机坐标中//使用前需要先用Solve()解出相机位姿//输入为图像上的点坐标//double F为镜头焦距//输出为点在焦距=F时的相机坐标系坐标cv::Point3f PNPSolver::ImageFrame2CameraFrame(cv::Point2f p, double F){ double fx; double fy; double u0; double v0; fx = camera_matrix.ptr<double>(0)[0]; u0 = camera_matrix.ptr<double>(0)[2]; fy = camera_matrix.ptr<double>(1)[1]; v0 = camera_matrix.ptr<double>(1)[2]; double zc = F; double xc = (p.x - u0)*F / fx; double yc = (p.y - v0)*F / fy; return cv::Point3f(xc, yc, zc);} |
一个典型的调用示例
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 | //初始化PNPSolver类PNPSolver p4psolver;//初始化相机参数p4psolver.SetCameraMatrix(fx, fy, u0, v0);//设置畸变参数p4psolver.SetDistortionCoefficients(k1, k2, p1, p2, k3); //设置特征点的世界坐标p4psolver.Points3D.push_back(cv::Point3f(0, 0, 0)); //P1三维坐标的单位是毫米p4psolver.Points3D.push_back(cv::Point3f(0, 200, 0)); //P2p4psolver.Points3D.push_back(cv::Point3f(150, 0, 0)); //P3//p4psolver.Points3D.push_back(cv::Point3f(150, 200, 0)); //P4p4psolver.Points3D.push_back(cv::Point3f(0, 100, 105)); //P5cout << "test2:特征点世界坐标 = " << endl << p4psolver.Points3D << endl; //设置特征点的图像坐标p4psolver.Points2D.push_back(cv::Point2f(2985, 1688)); //P1p4psolver.Points2D.push_back(cv::Point2f(5081, 1690)); //P2p4psolver.Points2D.push_back(cv::Point2f(2997, 2797)); //P3//p4psolver.Points2D.push_back(cv::Point2f(5544, 2757)); //P4p4psolver.Points2D.push_back(cv::Point2f(4148, 673)); //P5cout << "test2:图中特征点坐标 = " << endl << p4psolver.Points2D << endl;if (p4psolver.Solve(PNPSolver::METHOD::CV_P3P) == 0) cout << "test2:CV_P3P方法: 相机位姿→" << "Oc坐标=" << p4psolver.Position_OcInW << " 相机旋转=" << p4psolver.Theta_W2C << endl;if (p4psolver.Solve(PNPSolver::METHOD::CV_ITERATIVE) == 0) cout << "test2:CV_ITERATIVE方法: 相机位姿→" << "Oc坐标=" << p4psolver.Position_OcInW << " 相机旋转=" << p4psolver.Theta_W2C << endl;if (p4psolver.Solve(PNPSolver::METHOD::CV_EPNP) == 0) cout << "test2:CV_EPNP方法: 相机位姿→" << "Oc坐标=" << p4psolver.Position_OcInW << " 相机旋转=" << p4psolver.Theta_W2C << endl; |
方法测试
OpenCV提供了三种方法进行PNP计算,三种方法具体怎么计算的就请各位自己查询opencv documentation以及相关的论文了,我看了个大概然后结合自己实际的测试情况给出一个结论,不一定正确,仅供参考:
|
方法名 |
说明 |
测试结论 |
|
CV_P3P |
这个方法使用非常经典的Gao方法解P3P问题,求出4组可能的解,再通过对第四个点的重投影,返回重投影误差最小的点。 论文《Complete Solution Classification for the Perspective-Three-Point Problem》 |
可以使用任意4个特征点求解,不要共面,特征点数量不为4时报错 |
|
CV_ITERATIVE |
该方法基于Levenberg-Marquardt optimization迭代求解PNP问题,实质是迭代求出重投影误差最小的解,这个解显然不一定是正解。 实测该方法只有用4个共面的特征点时才能求出正确的解,使用5个特征点或4点非共面的特征点都得不到正确的位姿。
|
只能用4个共面的特征点来解位姿 |
|
CV_EPNP |
该方法使用EfficientPNP方法求解问题,具体怎么做的当时网速不好我没下载到论文,后面又懒得去看了。 论文《EPnP: Efficient Perspective-n-Point Camera Pose Estimation》 |
对于N个特征点,只要N>3就能够求出正解。 |
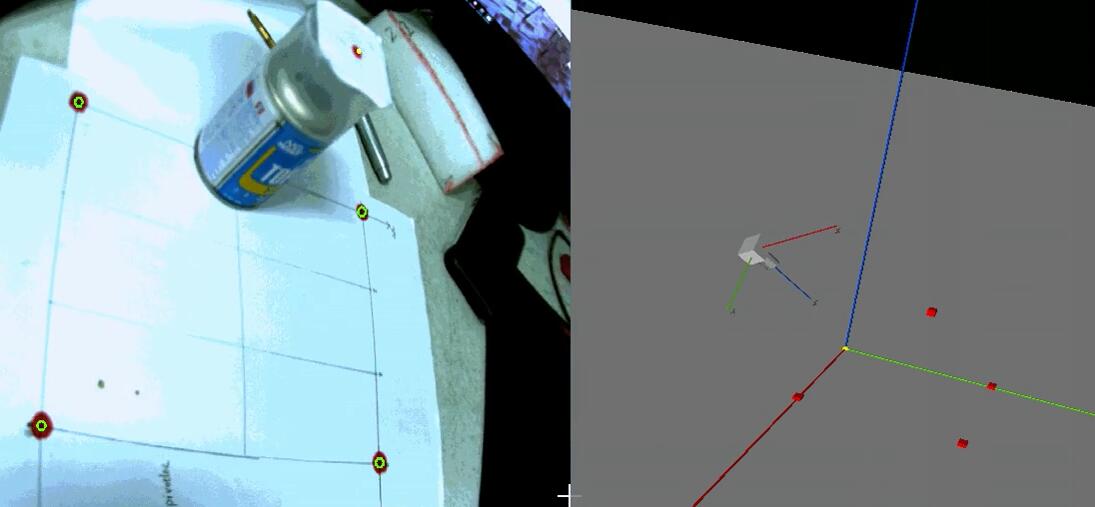
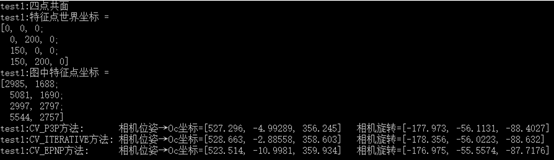
测试截图:
1.使用四个共面的特征点,显然三种方法都能得到正解,但相互之间略有误差。
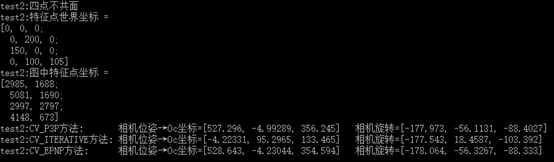
2使用四个非共面的特征点,CV_ITERATIVE方法解错了。
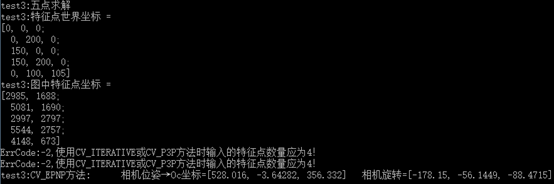
3.使用5个特征点求解,只有CV_EPNP能够用
性能测试
最后对三种方法的性能进行测试,通过对test1重复执行1000次获得算法的运行时间,从结果可以看出迭代法显然是最慢的,Gao的P3P+重投影法用时最少,EPNP法其次。

总结
综合以上的测试,推荐使用CV_P3P来解决实际问题,该方法对于有四个特征点的情况限制少、运算速度快。当特征点数大于4时,可以取多组4特征点计算出结果再求平均值,或者为了简单点就直接使用CV_EPNP法。
不推荐使用CV_ITERATIVE方法。
程序下载地址:Github
作者:VShawn
出处:https://www.cnblogs.com/singlex/p/pose_estimation_1_1.html
本文版权归作者所有,欢迎转载,但未经博客作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· go语言实现终端里的倒计时
· 如何编写易于单元测试的代码
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· 分享一个免费、快速、无限量使用的满血 DeepSeek R1 模型,支持深度思考和联网搜索!
· 基于 Docker 搭建 FRP 内网穿透开源项目(很简单哒)
· ollama系列1:轻松3步本地部署deepseek,普通电脑可用
· 按钮权限的设计及实现
· Apache Tomcat RCE漏洞复现(CVE-2025-24813)