相机位姿估计0:基本原理之如何解PNP问题
关键词:相机位姿估计 PNP问题求解
用途:各种位姿估计
文章类型:原理
@Author:VShawn(singlex@foxmail.com)
@Date:2016-11-18
@Lab: CvLab202@CSU
目录
今天给大家讲一讲相机位姿估计的基本原理,说实话我本人也没太了解,这里权当做抛砖引玉了。本来我这个博客是写应用型文章的,但虽然不做理论研究,但你要使用别人的方法来解决问题,那么也还是多多少少要对它的原理有点了解的。
关于PNP问题就是指通过世界中的N个特征点与图像成像中的N个像点,计算出其投影关系,从而获得相机或物体位姿的问题。
以下讨论中设相机位于点Oc,P1、P2、P3……为特征点。
Case1:当N=1时
当只有一个特征点P1,我们假设它就在图像的正中央,那么显然向量OcP1就是相机坐标系中的Z轴,此事相机永远是面对P1,于是相机可能的位置就是在以P1为球心的球面上,再一个就是球的半径也无法确定,于是有无数个解。
Case2:当N=2时
现在多了一个约束条件,显然OcP1P2形成一个三角形,由于P1、P2两点位置确定,三角形的变P1P2确定,再加上向量OcP1,OcP2从Oc点射线特征点的方向角也能确定,于是能够计算出OcP1的长度=r1,OcP2的长度=r2。于是这种情况下得到两个球:以P1为球心,半径为r1的球A;以P2为球心,半径为r2的球B。显然,相机位于球A,球B的相交处,依旧是无数个解。
Case3:当N=3时
与上述相似,这次又多了一个以P3为球心的球C,相机这次位于ABC三个球面的相交处,终于不再是无数个解了,这次应该会有4个解,其中一个就是我们需要的真解了。
Case4:当N大于3时
N=3时求出4组解,好像再加一个点就能解决这个问题了,事实上也几乎如此。说几乎是因为还有其他一些特殊情况,这些特殊情况就不再讨论了。N>3后,能够求出正解了,但为了一个正解就又要多加一个球D显然不够"环保",为了更快更节省计算机资源地解决问题,先用3个点计算出4组解获得四个旋转矩阵、平移矩阵。根据公式:
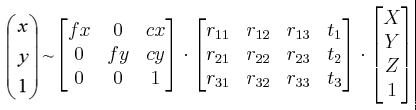
将第四个点的世界坐标代入公式,获得其在图像中的四个投影(一个解对应一个投影),取出其中投影误差最小的那个解,就是我们所需要的正解。
PNP问题的求解原理大致就是上面这样了,至于具体的数学方法还是请大家自己去查阅文献吧,本博客对这个问题的分析就到此为止了。接下来请看通过解PNP问题,求解相机位姿的应用。
作者:VShawn
出处:http://www.cnblogs.com/singlex/
本文版权归作者所有,欢迎转载,但未经博客作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号