空间点绕轴旋转公式&程序(C++)
 本文主要介绍在空间坐标系下,某一点绕xyz三个轴的旋转公式,以及某点绕任意轴旋转的公式,所有公式都有提供相应的C++代码,方便大家快速调用。
本文主要介绍在空间坐标系下,某一点绕xyz三个轴的旋转公式,以及某点绕任意轴旋转的公式,所有公式都有提供相应的C++代码,方便大家快速调用。
关键词:空间旋转、旋转轴
用途:相机位姿估计、无人机位姿估计、3D游戏、3D建模
文章类型:概念、公式总结(本文不带推导过程,若想了解公式是如何推出来的请搜索文献),C++函数展示
@Author:VShawn(singlex@foxmail.com)
@Date:2016-11-04
@Lab: CvLab202@CSU
写在前面的一些概念
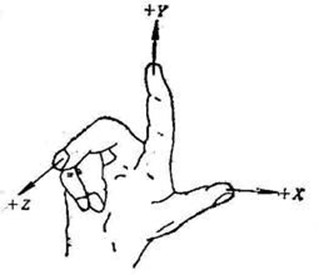
右手系
关于这个概念,搞3D的人应该都懂,而像我这样做图像处理的可能就对这个知道的比较少了。右手系这个概念其实很简单,看图就懂了。在坐标系中,右手摆成下图的样子,当拇指指向X轴食指指向Y轴时,中指指向了Z轴,满足这个条件的坐标系就是右手系。本文所有概念都在右手系下进行讨论。
右手系
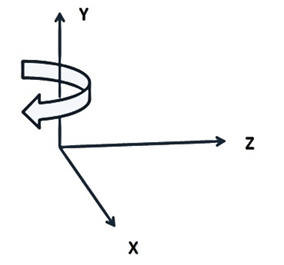
旋转90°到底是怎么转
当我要让一个点,绕Y轴转动了90°,并且用程序计算出了旋转结果,为了验证这个点是否旋转正确,我们需要知道这个90°是怎么转的。在网上搜索了挺多文章,都没有对这个东西进行明确的定义,那么这里给出我的总结。从原点(0,0,0)往Y轴方向看,此时视野中的坐标系降维到二维坐标系XOZ,那么让点绕O点顺时针转90°,即为正确的旋转结果。
[图待补]
问题一:XYZ空间内某点绕X、Y、Z轴旋转一次
这个问题比较简单,网上已经有较多总结:
设旋转前坐标为 ,旋转后坐标为
,旋转后坐标为 。
。
1.绕Z轴旋转γ角
首先给出向量表示:
\[\left[ x',y',z',1 \right]=\left[ x,y,z,1 \right]\left[ \begin{matrix} \cos \gamma & \sin \gamma & 0 & 0 \\ -\sin \gamma & \cos \gamma & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\\end{matrix} \right]\]
然后是公式表示:
\[\begin{align} & x'=cos\gamma \cdot x-sin\gamma \cdot y \\ & y'=\sin \gamma \cdot x+co\gamma \cdot y \\ & z'=z \\ \end{align}\]
最后是代码表示
//将空间点绕Z轴旋转
//输入参数 x y为空间点原始x y坐标
//thetaz为空间点绕Z轴旋转多少度,角度制范围在-180到180
//outx outy为旋转后的结果坐标
void codeRotateByZ(double x, double y, double thetaz, double& outx, double& outy)
{
double x1 = x;//将变量拷贝一次,保证&x == &outx这种情况下也能计算正确
double y1 = y;
double rz = thetaz * CV_PI / 180;
outx = cos(rz) * x1 - sin(rz) * y1;
outy = sin(rz) * x1 + cos(rz) * y1;
}
2.绕Y轴旋转β角
首先给出向量表示:
\[\left[ x',y',z',1 \right]=\left[ x,y,z,1 \right]\left[ \begin{matrix} \cos \beta & 0 & -\sin \beta & 0 \\ 0 & 1 & 0 & 0 \\ \sin \beta & 0 & \cos \beta & 0 \\ 0 & 0 & 0 & 1 \\\end{matrix} \right]\]
然后是公式表示:
\[\begin{align} & x'=cos\beta \cdot x+sin\beta \cdot z \\ & y'=y \\ & z'=-\sin \beta \cdot x+\cos \beta \cdot z \\ \end{align}\]
最后是代码表示
//将空间点绕Y轴旋转
//输入参数 x z为空间点原始x z坐标
//thetay为空间点绕Y轴旋转多少度,角度制范围在-180到180
//outx outz为旋转后的结果坐标
void codeRotateByY(double x, double z, double thetay, double& outx, double& outz)
{
double x1 = x;
double z1 = z;
double ry = thetay * CV_PI / 180;
outx = cos(ry) * x1 + sin(ry) * z1;
outz = cos(ry) * z1 - sin(ry) * x1;
}
3.绕X轴旋转α角
首先给出向量表示:
\[\left[ x',y',z',1 \right]=\left[ x,y,z,1 \right]\left[ \begin{matrix} 1 & 0 & 0 & 0 \\ 0 & \cos \alpha & \sin \alpha & 0 \\ 0 & -\sin \alpha & \cos \alpha & 0 \\ 0 & 0 & 0 & 1 \\\end{matrix} \right]\]
然后是公式表示:
\[\begin{align} & x'=x \\ & y'=\cos \alpha \cdot y-\sin \alpha \cdot z \\ & z'=\sin \alpha \cdot y+\sin \alpha \cdot z \\ \end{align}\]
最后是代码表示
//将空间点绕X轴旋转
//输入参数 y z为空间点原始y z坐标
//thetax为空间点绕X轴旋转多少度,角度制范围在-180到180
//outy outz为旋转后的结果坐标
void codeRotateByX(double y, double z, double thetax, double& outy, double& outz)
{
double y1 = y;//将变量拷贝一次,保证&y == &y这种情况下也能计算正确
double z1 = z;
double rx = thetax * CV_PI / 180;
outy = cos(rx) * y1 - sin(rx) * z1;
outz = cos(rx) * z1 + sin(rx) * y1;
}
问题二:空间点绕任意轴旋转
首先,需要定义"任意轴"的单位向量,例如X轴可以用向量 来表示。
来表示。
那么假设旋转轴的单位向量为 ,旋转前坐标为
,旋转前坐标为 ,旋转后坐标为
,旋转后坐标为 ,旋转角为
,旋转角为 ,于是有:
,于是有:
\[\begin{align} & x'=(vx\cdot vx\cdot (1-cos\theta )+cos\theta )\cdot x+(vx\cdot vy\cdot (1-cos\theta )-vz\cdot sin\theta )\cdot y+(vx\cdot vz\cdot (1-cos\theta )+vy\cdot sin\theta )\cdot z \\ & y'=(vx\cdot vy\cdot (1-cos\theta )+vz\cdot sin\theta )\cdot x+(vy\cdot vy\cdot (1-cos\theta )+cos\theta )\cdot y+(vy\cdot vz\cdot (1-cos\theta )-vx\cdot sin\theta )\cdot z \\ & z'=(vx\cdot vz\cdot (1-\cos \theta )-vy\cdot \sin \theta )\cdot x+(vy\cdot vz\cdot (1-\cos \theta )+vx\cdot \sin \theta )\cdot y+(vz\cdot vz\cdot (1-\cos \theta )+\cos \theta )\cdot z \\ \end{align}\]
计算时照着公式代入即可。
最后给出代码实现:
//定义返回结构体
struct Point3f
{
Point3f(double _x, double _y, double _z)
{
x = _x;
y = _y;
z = _z;
}
double x;
double y;
double z;
};
//点绕任意向量旋转,右手系
//输入参数old_x,old_y,old_z为旋转前空间点的坐标
//vx,vy,vz为旋转轴向量
//theta为旋转角度角度制,范围在-180到180
//返回值为旋转后坐标点
Point3f RotateByVector(double old_x, double old_y, double old_z, double vx, double vy, double vz, double theta)
{
double r = theta * CV_PI / 180;
double c = cos(r);
double s = sin(r);
double new_x = (vx*vx*(1 - c) + c) * old_x + (vx*vy*(1 - c) - vz*s) * old_y + (vx*vz*(1 - c) + vy*s) * old_z;
double new_y = (vy*vx*(1 - c) + vz*s) * old_x + (vy*vy*(1 - c) + c) * old_y + (vy*vz*(1 - c) - vx*s) * old_z;
double new_z = (vx*vz*(1 - c) - vy*s) * old_x + (vy*vz*(1 - c) + vx*s) * old_y + (vz*vz*(1 - c) + c) * old_z;
return Point3f(new_x, new_y, new_z);
}
问题三:空间点绕xyz轴连续旋转
前面的问题比较基础,到这个问题就需要一点空间想象力了。
首先我假设一个点绕x、y、z轴旋转90°,最终它会落在哪里?这个答案不是唯一的,因为旋转的顺序将会影响到最终的结果。
以点(1,2,3)为例
A 我让它首先绕x轴转90°,再绕y轴转90°,再绕z轴转90°。
double x = 1, y = 2, z = 3;
codeRotateByX(y, z, 90, y, z);
codeRotateByY(x, z, -90, x, z);
codeRotateByZ(x, y, -90, x, y);
cout << endl << " (1,2,3) -> (" << x << ',' << y << ',' << z << ")" << endl << endl;
旋转结果是:
B 这一次我让它首先绕z轴转90°,再绕y轴转90°,最后绕z轴转90°。
double x = 1, y = 2, z = 3;
codeRotateByZ(x, y, -90, x, y);
codeRotateByY(x, z, -90, x, z);
codeRotateByX(y, z, 90, y, z);
cout << endl << " (1,2,3) -> (" << x << ',' << y << ',' << z << ")" << endl << endl;
这次的结果是:
显然,不同的旋转顺序导致了结果的不同,因此在处理空间内绕轴旋转的问题时,我们需要严格定义每次旋转的顺序,否则会导致错误的答案。
作者:VShawn
出处:http://www.cnblogs.com/singlex/
本文版权归作者所有,欢迎转载,但未经博客作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则保留追究法律责任的权利。


