标定相机
在之前的博客中,介绍了标定相机参数的原理,这一篇博客主要来说标定相机参数的实现。
二,相机标定的实现
1.相机标定的目的:获取摄像机的内参和外参矩阵(同时也会得到每一幅标定图像的选择和平移矩阵),内参和外参系数可以对之后相机拍摄的图像就进行矫正,得到畸变相对很小的图像。
2.相机标定的输入:标定图像上所有内角点的图像坐标,标定板图像上所有内角点的空间三维坐标(一般情况下假定图像位于Z=0平面上)。
3.相机标定的输出:摄像机的内参、外参系数。
4.这三个基础的问题就决定了使用Opencv实现张正友法标定相机的标定流程、标定结果评价以及使用标定结果矫正原始图像的完整流程:
准备标定图片
对每一张标定图片,提取角点信息
对每一张标定图片,进一步提取亚像素角点信息
在棋盘标定图上绘制找到的内角点(非必须,仅为了显示)
相机标定
对标定结果进行评价
查看标定效果——利用标定结果对棋盘图进行矫正
5.我准备了一份棋盘格,然后拍摄十张图片,手机型号vivoX7
我是运用Matlab进行实现的,详细步骤参考博客:https://blog.csdn.net/a083614/article/details/78579163
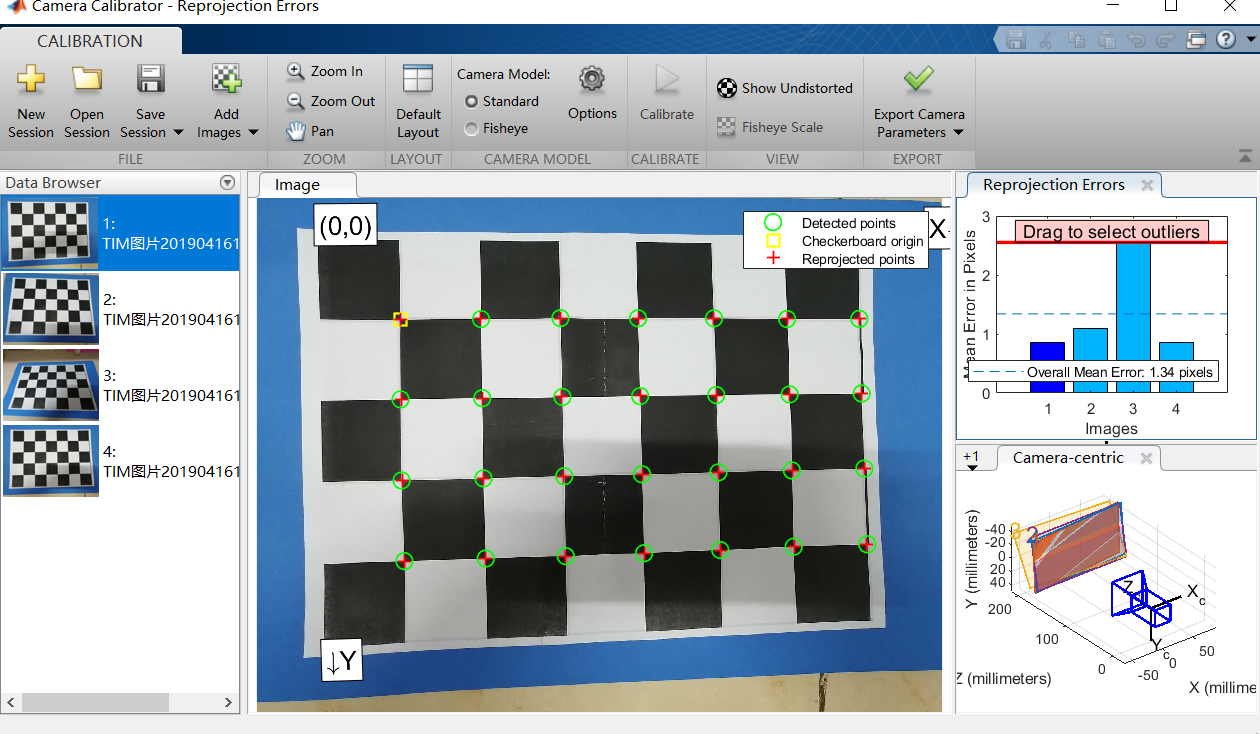
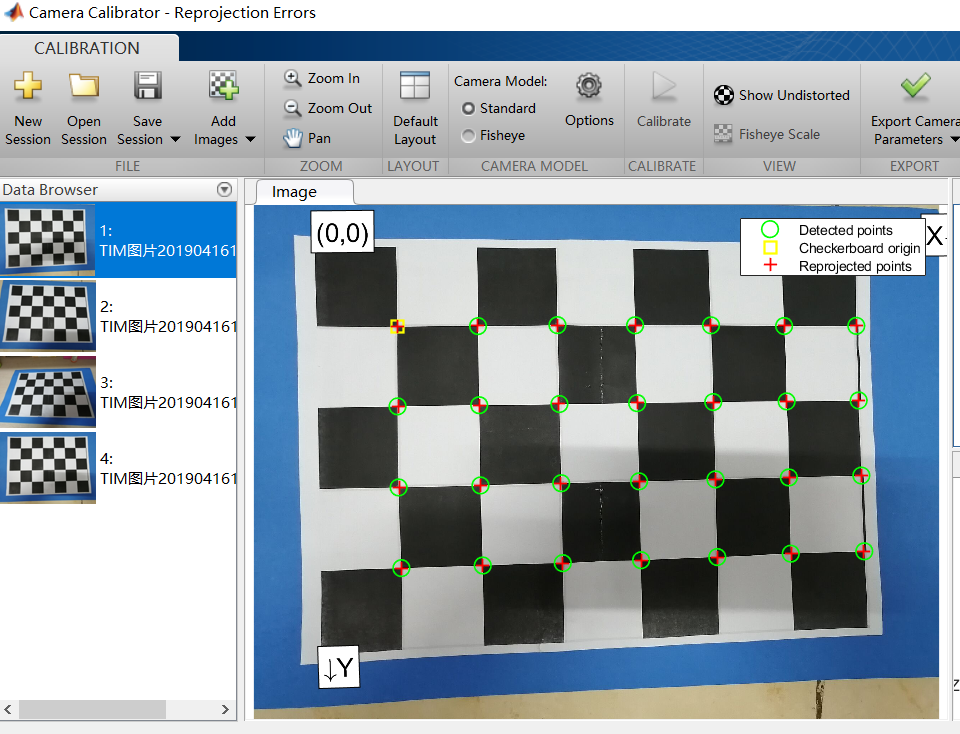
首先显示已检测出的棋盘格,点击Calibration,开始标定。
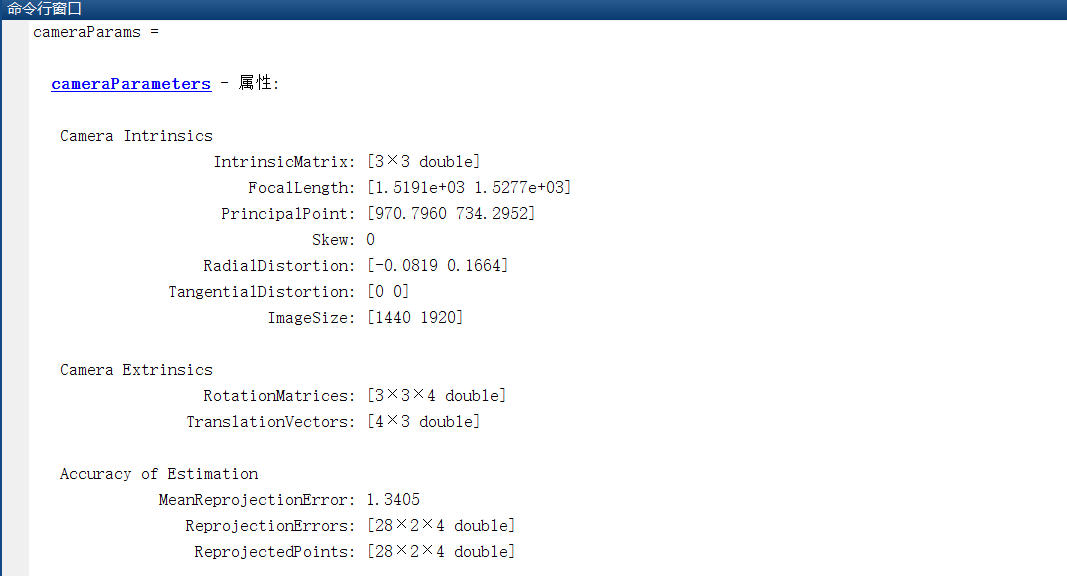
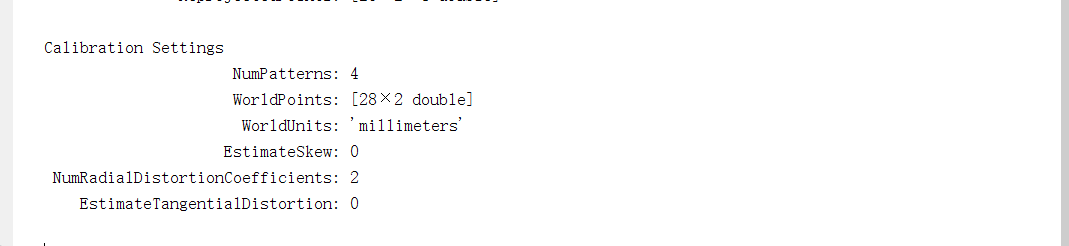
然后可以得到标定结果: