匈牙利 算法&模板
匈牙利 算法
一. 算法简介
匈牙利算法是由匈牙利数学家Edmonds于1965年提出。该算法的核心就是寻找增广路径,它是一种用增广路径求二分图最大匹配的算法。
二分图的定义:
设G=(V,E)是一个无向图,顶点集V可分割为两个互不相交的子集V1,V2,那么称此图G为二分图。
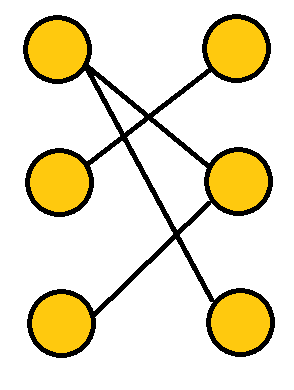
例如,下图就是一个二分图:
二分图的匹配:
二分图中的子图中,每个节点只连一条边,则称该子图是二分图中的一个匹配。
极大匹配:
无法再向二分图中加入边,使得满足匹配条件。
最大匹配:
所有极大匹配中边数最多的一个匹配。
完美匹配:
如果一个图的某个匹配中,所有的顶点都是匹配点,那么它就是一个完美匹配。
方法:
求最大匹配的一种显而易见的算法是:先找出全部匹配,然后保留匹配数最多的。但是这个算法的时间复杂度为边数的指数级。因此,需要寻求一种更加高效的算法。下面介绍用增广路求最大匹配的方法。
算法图解:
下图是一个二分图,现在求最大匹配。
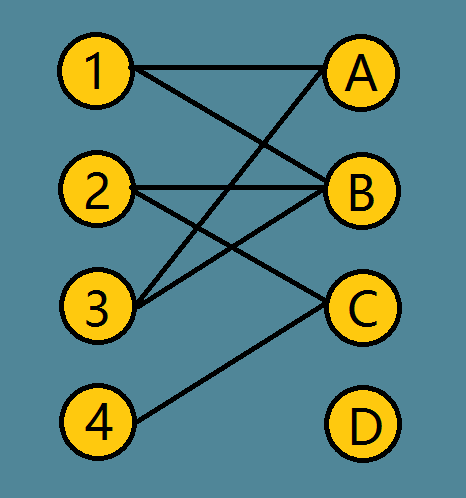
先从1出发,找增广路,找到1->A 这条路,标记并记录。
从2出发,找到2->B这条路,标记并记录。
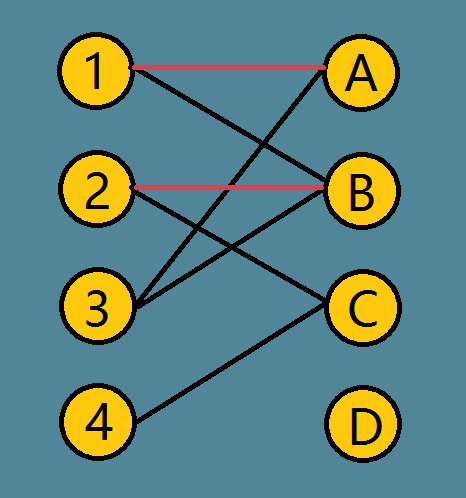
从3开始找,发现3所连接边全部被占用,这时进行一个神奇的操作:
从三开始找一条增广路,3 -> A -> 1 -> B -> 2 -> C
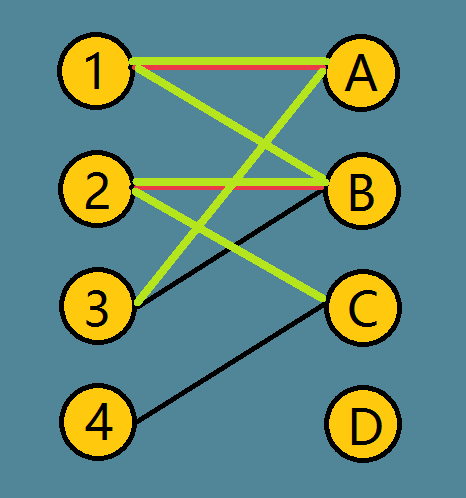
这时,在图中将有两种颜色的边删去,留下绿色的边。
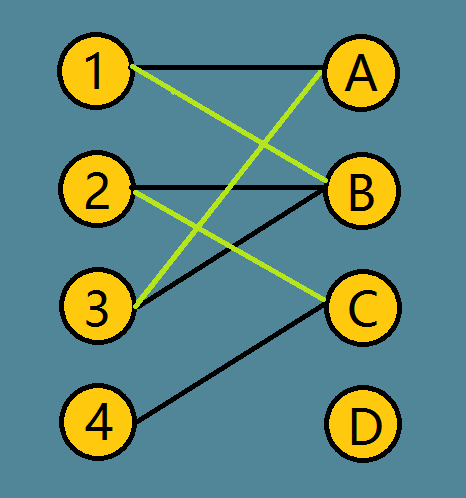
这时,这张图的最大匹配值就是3.
三.算法模板
核心代码:
1 bool Hungary ( int x ) { 2 for ( int i = head[ x ] ; i ; i = E[ i ] . next ) { 3 if ( vis[ i ] ) continue ; 4 int temp = E[ i ] . to ; 5 vis[ i ] = true ; 6 if ( !match[ temp ] || Hungary ( match[ temp ] ) ) { 7 match [ temp ] = x ; 8 return true ; 9 } 10 } 11 return false ; 12 }
主程序:
for ( k=1 ; k<=M ; ++k ) { memset ( vis , false , sizeof ( vis ) ) ; if ( !Hungary ( k ) ) break ; }
时间复杂度:
邻接矩阵: O(n3)
邻接表: O(nm)
邻接表: O(nm)
空间复杂度:
邻接矩阵: O(n2)
邻接表:O(n+m)
邻接表:O(n+m)
2016-09-16 02:18:44
(完)
