
CUDA 标准编程模式
前言
本文将介绍 CUDA 编程的基本模式,所有 CUDA 程序都基于此模式编写,即使是调用库,库的底层也是这个模式实现的。
模式描述
1. 定义需要在 device 端执行的核函数。( 函数声明前加 _golbal_ 关键字 )
2. 在显存中为待运算的数据以及需要存放结果的变量开辟显存空间。( cudaMalloc 函数实现 )
3. 将待运算的数据传输进显存。( cudaMemcpy,cublasSetVector 等函数实现 )
4. 调用 device 端函数,同时要将需要为 device 端函数创建的块数线程数等参数传递进 <<<>>>。( 注: <<<>>>下方编译器可能显示语法错误,不用管 )
5. 从显存中获取结果变量。( cudaMemcpy,cublasGetVector 等函数实现 )
6. 释放申请的显存空间。( cudaFree 实现 )
PS:每个 device 端函数在被调用时都能获取到调用它的具体块号,线程号,从而实现并行( 获取方法请参考下面的编程规范说明以及代码示例 )。
编程规范说明
在 CUDA 标准编程模式中,增加了一些编程规范,在这里简要说明:
函数声明关键字:
1. __device__
表明此函数只能在 GPU 中被调用,在 GPU 中执行。这类函数只能被 __global__ 类型函数或 __device__ 类型函数调用。
2. __global__
表明此函数在 CPU 上调用,在 GPU 中执行。这也是以后会常提到的 "内核函数",有时为了便于理解也称 "device" 端函数。
3. __host__
表明此函数在 CPU 上调用和执行,这也是默认情况。
内核函数配置运算符 <<<>>> - 这个运算符在调用内核函数的时候使用,一般情况下传递进三个参数:
1. 块数
2. 线程数
3. 共享内存大小 (此参数默认为0 )
内核函数中的几个系统变量 - 这几个变量可以在内核函数中使用,从而控制块与线程的工作:
1. gridDim:块数
2. blockDim:块中线程数
3. blockIdx:块编号 (0 - gridDim-1)
4. threadIdx:线程编号 (0 - blockDim-1)
知道这些已经足够编写 CUDA 程序了,更多的编程说明将在以后的文章中介绍。
代码示例
该程序采用 CUDA 并行化思想来对数组进行求和 (代码下方如果出现红色波浪线无视之):
1 // 相关 CUDA 库 2 #include "cuda_runtime.h" 3 #include "cuda.h" 4 #include "device_launch_parameters.h" 5 6 #include <iostream> 7 #include <cstdlib> 8 9 using namespace std; 10 11 const int N = 100; 12 13 // 块数 14 const int BLOCK_data = 3; 15 // 各块中的线程数 16 const int THREAD_data = 10; 17 18 // CUDA初始化函数 19 bool InitCUDA() 20 { 21 int deviceCount; 22 23 // 获取显示设备数 24 cudaGetDeviceCount (&deviceCount); 25 26 if (deviceCount == 0) 27 { 28 cout << "找不到设备" << endl; 29 return EXIT_FAILURE; 30 } 31 32 int i; 33 for (i=0; i<deviceCount; i++) 34 { 35 cudaDeviceProp prop; 36 if (cudaGetDeviceProperties(&prop,i)==cudaSuccess) // 获取设备属性 37 { 38 if (prop.major>=1) //cuda计算能力 39 { 40 break; 41 } 42 } 43 } 44 45 if (i==deviceCount) 46 { 47 cout << "找不到支持 CUDA 计算的设备" << endl; 48 return EXIT_FAILURE; 49 } 50 51 cudaSetDevice(i); // 选定使用的显示设备 52 53 return EXIT_SUCCESS; 54 } 55 56 // 此函数在主机端调用,设备端执行。 57 __global__ 58 static void Sum (int *data,int *result) 59 { 60 // 取得线程号 61 const int tid = threadIdx.x; 62 // 获得块号 63 const int bid = blockIdx.x; 64 65 int sum = 0; 66 67 // 有点像网格计算的思路 68 for (int i=bid*THREAD_data+tid; i<N; i+=BLOCK_data*THREAD_data) 69 { 70 sum += data[i]; 71 } 72 73 // result 数组存放各个线程的计算结果 74 result[bid*THREAD_data+tid] = sum; 75 } 76 77 int main () 78 { 79 // 初始化 CUDA 编译环境 80 if (InitCUDA()) { 81 return EXIT_FAILURE; 82 } 83 cout << "成功建立 CUDA 计算环境" << endl << endl; 84 85 // 建立,初始化,打印测试数组 86 int *data = new int [N]; 87 cout << "测试矩阵: " << endl; 88 for (int i=0; i<N; i++) 89 { 90 data[i] = rand()%10; 91 cout << data[i] << " "; 92 if ((i+1)%10 == 0) cout << endl; 93 } 94 cout << endl; 95 96 int *gpudata, *result; 97 98 // 在显存中为计算对象开辟空间 99 cudaMalloc ((void**)&gpudata, sizeof(int)*N); 100 // 在显存中为结果对象开辟空间 101 cudaMalloc ((void**)&result, sizeof(int)*BLOCK_data*THREAD_data); 102 103 // 将数组数据传输进显存 104 cudaMemcpy (gpudata, data, sizeof(int)*N, cudaMemcpyHostToDevice); 105 // 调用 kernel 函数 - 此函数可以根据显存地址以及自身的块号,线程号处理数据。 106 Sum<<<BLOCK_data,THREAD_data,0>>> (gpudata,result); 107 108 // 在内存中为计算对象开辟空间 109 int *sumArray = new int[THREAD_data*BLOCK_data]; 110 // 从显存获取处理的结果 111 cudaMemcpy (sumArray, result, sizeof(int)*THREAD_data*BLOCK_data, cudaMemcpyDeviceToHost); 112 113 // 释放显存 114 cudaFree (gpudata); 115 cudaFree (result); 116 117 // 计算 GPU 每个线程计算出来和的总和 118 int final_sum=0; 119 for (int i=0; i<THREAD_data*BLOCK_data; i++) 120 { 121 final_sum += sumArray[i]; 122 } 123 124 cout << "GPU 求和结果为: " << final_sum << endl; 125 126 // 使用 CPU 对矩阵进行求和并将结果对照 127 final_sum = 0; 128 for (int i=0; i<N; i++) 129 { 130 final_sum += data[i]; 131 } 132 cout << "CPU 求和结果为: " << final_sum << endl; 133 134 getchar(); 135 136 return 0; 137 }
运行测试
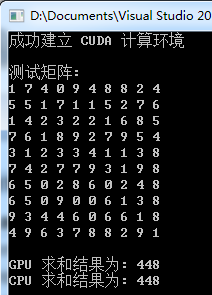
PS:矩阵元素是随机生成的
小结
1. 掌握本节知识的关键除了要掌握各个API,还要深刻理解内核函数中的块及线程变量的控制,或者说施展 :)
2. 一定要明确传递进 API 的是参数本身,还是参数的地址,这很关键。

