



图的邻接矩阵表示
图的邻接矩阵表示
图基概念(Graph)
-
包含
- 一组顶点:通常用V (Vertex) 表示顶点集合
- 一组边:通常用E (Edge) 表示边的集合
- 边是顶点对:(v, w) ∈E ,其中v, w ∈ V有向边<v, w> 表示从v指向w的边(单行线)不考虑重边和自回路
-
无向图:边是无向边(v, w)
-
有向图:边是有向边<v, w>
-
连通:如果从V到W存在一条(无向)路径,则称V和W是连通的
-
连通图(Connected Graph):如果对于图的任一两个顶点v、w∈V,v和w都是连通的,则称该图为连通图。图中任意两顶点均连通。
-
连通分量(Connected Component):无向图中的极大连通子图。
- 极大顶点数:再加1个顶点就不连通了
- 极大边数:包含子图中所有顶点相连的所有边
-
强连通:有向图中顶点V和W之间存在双向路径,则称V和W是强连通的。
-
强连通图:有向图中任意两顶点均强连通。
-
强连通分量:有向图的极大强连通子图。
-
路径:V到W的路径是一系列顶点{V, v1, v2, …,vn, W}的集合,其中任一对相邻的顶点间都有图中的边。路径的长度是路径中的边数(如果带权,则是所有边的权重和)。
-
如果V到W之间的所有顶点都不同,则称简单路径
-
回路:起点等于终点的路径
邻接矩阵
-
图的邻接矩阵存储方式就是用一个二维数组来表示。邻接矩阵G[N][N]——N个顶点从0到N-1编号顶点i、j有边,则G[i][j] = 1 或边的权重
-
邻接矩阵的优点
- 直观、简单、好理解
- 方便检查任意一对顶点间是否存在边
- 方便找任一顶点的所有“邻接点”(有边直接相连的顶点)
- 方便计算任一顶点的“度”(从该点发出的边数为“出度”,指向该点的边数为“入度”)
- 无向图:对应行(或列)非0元素的个数
- 有向图:对应行非0元素的个数是“出度”;对应列非0元素的个数是“入度”
-
邻接矩阵的缺点
- 浪费空间—— 存稀疏图(点很多而边很少)有大量无效元素
- 对稠密图(特别是完全图)还是很合算的
- 浪费时间—— 统计稀疏图中一共有多少条边
BFS广度优先搜索(Breadth First Search, BFS)
-
运用队列,将顶点V的每个邻接点进队。(类似于树的层先遍历)
-
若有N个顶点、E条边,时间复杂度是
- 用邻接表存储图,有O(N+E)
- 用邻接矩阵存储图,有O(N^2)
DFS深度优先搜索索(Depth First Search, DFS)
-
用递归(类似于树的先序遍历)。
-
ListComponents 图不连通时,列出各连通分量。
-
若有N个顶点、E条边,时间复杂度是
- 用邻接表存储图,有O(N+E)
- 用邻接矩阵存储图,有O(N^2) -
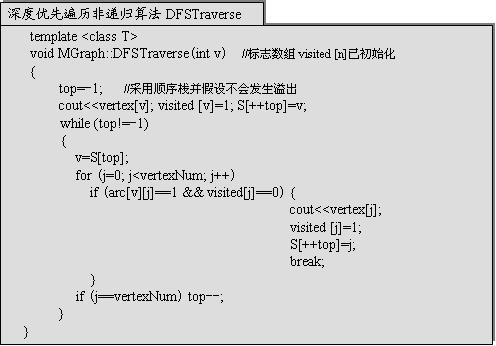
深度优先遍历算法的非递归实现需要了解深度优先遍历的执行过程,设计一个栈来模拟递归实现中系统设置的工作栈,算法的伪代码描述为:
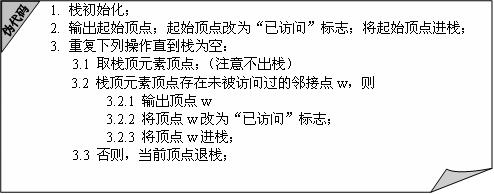
- 假设图采用邻接矩阵作为存储结构,具体算法如下:
测试代码:
/*!
* \file 图的邻接矩阵表示.cpp
*
* \author ranjiewen
* \date 2017/04/10 23:20
*
*
*/
#include <iostream>
#include <cstdio>
#include <cstdlib>
#include <queue>
using namespace std;
/* 图的邻接矩阵表示法 */
#define MaxVertexNum 100 /*最大顶点数设为100*/
#define INFINITY 65535 /*设为双字节无符号整数的最大值为65535*/
typedef int Vertex; /*用顶点下标表示顶点,为整型*/
typedef int WeightType; /*边的权值设为整型*/
typedef char DataType; /*顶点存储的数据类型设为字符型*/
/*边的定义*/
typedef struct ENode* PtrToENode;
struct ENode
{
Vertex V1, V2; //有向边<v1,v2>
WeightType Weight;//权重
};
typedef PtrToENode Edge;
/*图结点的定义*/
typedef struct GNode *PtrToGNode;
struct GNode
{
int Nv; //顶点树
int Ne; //边数
WeightType G[MaxVertexNum][MaxVertexNum]; //邻接矩阵
DataType Data[MaxVertexNum];// 存顶点的数据
//注意:很多情况下,顶点无数据,此时Data[]可以不用出现
};
typedef PtrToGNode MGraph; /*用邻接矩阵存储的图类型*/
bool Visited[MaxVertexNum] = { false };
MGraph CreateGraph(int VertexNum)
{
/*初始化一个有VertexNum个顶点但没有边的图*/
Vertex V, W; /*顶点的下标*/
MGraph Graph;
Graph = (MGraph)malloc(sizeof(struct GNode)); /*建立图*/
Graph->Nv = VertexNum;
Graph->Ne = 0;
//初始化邻接矩阵
//注意:这里默认顶点编号从0开始到(Graph->Nv - 1)
for (V = 0; V < Graph->Nv;V++)
{
for (W = 0; W < Graph->Nv;W++)
{
Graph->G[V][W] = INFINITY;
}
}
return Graph;
}
void InsertEdge(MGraph Graph,Edge E)
{
//插入边<v1,v2>
Graph->G[E->V1][E->V2] = E->Weight;
//若是无向图,还要插入边<v2,v1>
Graph->G[E->V2][E->V1] = E->Weight;
}
MGraph BuildGraph()
{
MGraph Graph;
Edge E;
Vertex V;
int Nv, i;
scanf("%d", &Nv); /*读入顶点个数*/
Graph = CreateGraph(Nv); /* 初始化有Nv个顶点但没有边的图 */
scanf("%d", &(Graph->Ne)); /*读入边数*/
if (Graph->Ne!=0) //如果有边
{
E = (Edge)malloc(sizeof(struct ENode)); //建立边结点
//读入边,格式为:起点,中点,权重;插入邻接矩阵
for (i = 0; i < Graph->Ne;i++)
{
scanf("%d %d %d", &E->V1, &E->V2, &E->Weight);
//注意:如果权重不是整型,weight的读入格式要改变
InsertEdge(Graph, E);
}
}
//如果顶点有数据的话,读入数据
for (V = 0; V < Graph->Nv;V++)
{
//scanf("%c", &(Graph->Data[V]));
}
return Graph;
}
/* 邻接矩阵存储的图 - BFS */
/* IsEdge(Graph, V, W)检查<V, W>是否图Graph中的一条边,即W是否V的邻接点。 */
/* 此函数根据图的不同类型要做不同的实现,关键取决于对不存在的边的表示方法。*/
/* 例如对有权图, 如果不存在的边被初始化为INFINITY, 则函数实现如下: */
bool IsEdge(MGraph Graph, Vertex V, Vertex W)
{
return Graph->G[V][W] < INFINITY ? true : false;
}
void InitVisited()
{
for (int i = 0; i < MaxVertexNum;i++)
{
Visited[i] = false;
}
}
void Visit(Vertex v)
{
printf("%d ", v);
}
//连通下的DFS和BFS
void BFS(MGraph Graph, Vertex S, void(*Visit)(Vertex))
{
/* 以S为出发点对邻接矩阵存储的图Graph进行BFS搜索 */
queue<Vertex> Q;
Vertex V, W;
Visit(S);
Visited[S] = true;
Q.push(S);
while (!Q.empty()) {
V = Q.front();
Q.pop();
for (W = 0; W < Graph->Nv; W++) /* 对图中的每个顶点W */
/* 若W是V的邻接点并且未访问过 */
if (!Visited[W] && IsEdge(Graph, V, W))
{
/* 访问顶点W */
Visit(W);
Visited[W] = true;
Q.push(W);
}
}
}
void DFS(MGraph Graph, Vertex S, void(*Visit)(Vertex))
{
/* 以V为出发点对邻接表存储的图Graph进行DFS搜索 */
Visited[S] = true;
Visit(S);
for (Vertex w = 0; w < Graph->Nv; w++) {
if (IsEdge(Graph, S, w) && Visited[w] == false) {
DFS(Graph, w, Visit);
}
}
}
//非连通下的遍历
Vertex listDFS(MGraph Graph, void(*Visit)(Vertex))
{
Vertex i;
for (i = 0; i < Graph->Nv; i++) {
if (Visited[i] == false)
break;
}
if (i == Graph->Nv)
return 0;
DFS(Graph, i, Visit);
printf("\n");
return listDFS(Graph, Visit);
}
void DFSListComponents(MGraph Graph, void(*Visit)(Vertex))
{
for (Vertex i = 0; i < Graph->Nv; i++) {
if (Visited[i] == false) {
DFS(Graph, i, Visit);
printf("\n");
}
}
}
void BFSListComponents(MGraph Graph, void(*Visit)(Vertex))
{
for (Vertex i = 0; i < Graph->Nv; i++) {
if (Visited[i] == false) {
BFS(Graph, i, Visit);
printf("\n");
}
}
}
int main()
{
MGraph graph;
graph = BuildGraph();
InitVisited();
listDFS(graph, &Visit);
InitVisited();
DFSListComponents(graph, &Visit);
InitVisited();
//BFS(graph,0,&Visit);
BFSListComponents(graph, &Visit);
return 0;
}
结果:

Reference
C/C++基本语法学习
STL
C++ primer

