【深度学习】【论文学习】【推荐系统】 Session-Based Recommendation
《SESSION-BASED RECOMMENDATIONS WITH RECURRENT NEURAL NETWORKS》
http://arxiv.org/abs/1511.06939
GRU是什么
在LSTM中引入了三个门函数:输入门、遗忘门和输出门 。GRU模型中只有两个门:更新门和重置门。
更新门的值越大说明前一时刻的状态信息带入越多。重置门越小,前一状态的信息被写入的越少。
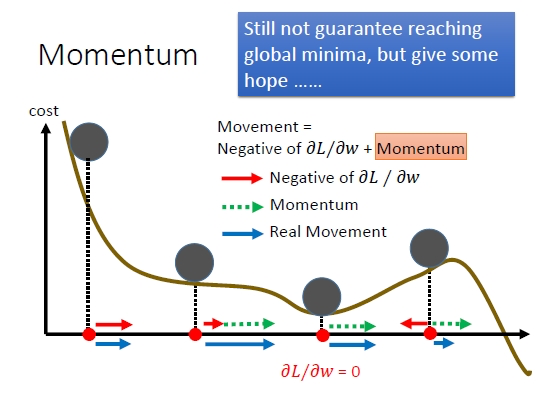
Momentum是什么
梯度下降来求解神经网络的参数,我们在梯度下降时,为了加快收敛速度,通常使用一些优化方法,比如:momentum、RMSprop和Adam等。
SGD每次都会在当前位置上沿着负梯度方向更新,并不考虑之前的方向梯度大小。而动量(moment)通过引入一个新的变量 v,v 去积累之前的梯度(通过指数衰减平均得到)。最直观的理解就是,若当前的梯度方向与累积的历史梯度方向一致,则当前的梯度会被加强,从而这一步下降的幅度更大。若当前的梯度方向与累积的梯度方向不一致,则会减弱当前下降的梯度幅度。红色是梯度方向,绿色是momentum。
下面给出momentum的伪代码:
initialize VdW = 0, vdb = 0 //VdW维度与dW一致,Vdb维度与db一致 on iteration t: compute dW,db on current mini-batch(your gradients,beta -- the momentum hyperparameter,一般取值为0.5, 0.9, 0.99。ng推荐取值0.9)
VdW = beta*VdW + (1-beta)*dW Vdb = beta*Vdb + (1-beta)*db W = W - learning_rate * VdW b = b - learning_rate * Vdb
什么是AdaGrad(Adaptive Gradient)
通常,我们在每一次更新参数时,对于所有的参数使用相同的学习率。而AdaGrad算法的思想是:每一次更新参数时(一次迭代),不同的参数使用不同的学习率。效果是这样就可以使得参数在平缓的地方下降的稍微快些,不至于徘徊不前。但是用的时候要注意,缺点,从训练开始时累积梯度平方会导致学习率过早过量的减少,梯度消失
GW += (dW)^2
W -= learning_rate/(sqrt(GW) + epsilon)*dW
Gb += (db)^2
b -= learning_rate/(sqrt(Gb)+ epsilon)*db
Gt -- python dictionary containing sum of the squares of the gradients up to step t.
#AdaGrad initialization
def initialize_adagrad(parameters):
L = len(parameters) // 2 # number of layers in the neural networks
G = {}
# Initialize velocity
for l in range(L):
G["dW" + str(l + 1)] = np.zeros(parameters["W" + str(l + 1)].shape)
G["db" + str(l + 1)] = np.zeros(parameters["b" + str(l + 1)].shape)
return G
def update_parameters_with_adagrad(parameters, grads, G, learning_rate, epsilon = 1e-7):
L = len(parameters) // 2 # number of layers in the neural networks
# Momentum update for each parameter
for l in range(L):
# compute velocities
G["dW" + str(l + 1)] += grads['dW' + str(l + 1)]**2
G["db" + str(l + 1)] += grads['db' + str(l + 1)]**2
# update parameters
parameters["W" + str(l + 1)] -= learning_rate / (np.sqrt(G["dW" + str(l + 1)]) + epsilon) * grads['dW' + str(l + 1)]
parameters["b" + str(l + 1)] -= learning_rate / (np.sqrt(G["db" + str(l + 1)]) + epsilon) * grads['db' + str(l + 1)]
return parameters
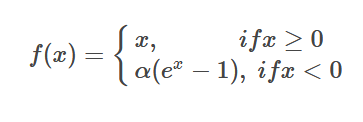
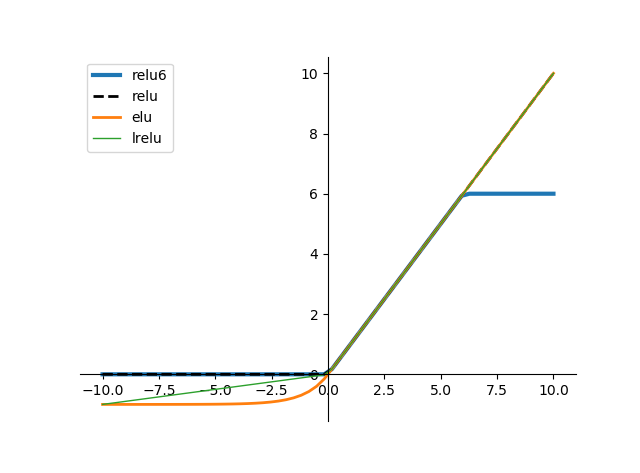
什么是激活函数elu
它结合了sigmoid和ReLU函数(橙色的线),右侧线性部分使得ELU能缓解梯度消失,而左侧软饱和能让对ELU对输入变化或噪声更鲁棒。ELU的输出均值接近于0,所以收敛速度更快。相比于ReLU函数,在输入为负数的情况下,是有一定的输出的,这样可以消除ReLU死掉的问题
input=tf.constant([0,-1,2,-3],dtype=tf.float32)
output=tf.nn.elu(input)
with tf.Session() as sess:
print('input:')
print(sess.run(input))
print('output:')
print(sess.run(output))
sess.close()
输出结果:
input:
[ 0. -1. 2. -3.]
output:
[ 0. -0.63212055 2. -0.95021296]
theano语法是什么
theano.function相当于sess.run
import numpy as np
import theano.tensor as T
import theano
#activation function example激活函数的例子
x=T.dmatrix('x')
s=1/(1+T.exp(-x)) #np.exp 这是一个激活函数的式子
logistic=theano.function([x],s)
print(logistic([[0,1],[-2,-3]]))
#multiply output for a function多个输入输出的例子
a,b=T.dmatrices('a','b')
dif=a-b
abs_dif=abs(dif) #绝对值
square_dif=dif**2 #平方
f=theano.function([a,b],[dif,abs_dif,square_dif])#2个输出
print(f(np.ones((2,2)),np.arange(4).reshape((2,2)) ))
x=theano.shared(np.random.rand(3,),'x')
print x.get_value()
f=theano.function([],updates={x:x+1})#x更新为x+1
f()#执行,这一步不能少,执行了updates才有效
print x.get_value()
为什么要定义共享变量?
定义共享变量的原因在于GPU的使用,如果不定义共享的话,那么当GPU调用这些变量时,遇到一次就要调用一次,这样就会花费大量时间在数据存取上,导致使用GPU代码运行很慢,甚至比仅用CPU还慢。shared变量可以通过.set_value()和.get_value()设置和读取状态值
共享变量的类型必须为floatX
因为GPU要求在floatX上操作,所以所有的共享变量都要声明为floatX类型
shared_x = theano.shared(numpy.asarray(data_x, dtype=theano.config.floatX))
self.A = theano.shared(name = "A", value = E.astype(theano.config.floatX))
创建tensor variables
在创建变量时可以给变量命名,命名能够加快debugging的过程,所有的构造器中都有name参数供命名
broadcastable是什么
这个东西是一个布尔有元素组成的元组,比如[False,True,False]。
For dimensions in which broadcasting is False, the length of this dimension can be 1 or more.
For dimension in which broadcasting is True, the length of this dimension must be 1
shared变量默认的是broadcastable=False,所以要想使用broadcasrable pattern,需要特别指定,如
theano.shared(...,broadcastable=(True,False))
softmax_neg是在算什么
def softmax_neg(self, X):
hm = 1.0 - T.eye(*X.shape)
X = X * hm
e_x = T.exp(X - X.max(axis=1).dimshuffle(0, 'x')) * hm
return e_x / e_x.sum(axis=1).dimshuffle(0, 'x')
[0,1], [-2,-3] 1.0 - T.eye(*X.shape)得到: [[0. 1.] [1. 0.]] X = X * hm 得到(对应每个元素相乘)(把X的正对角元素拿出来,其余是0) [[ 0. 1.] [-2. -0.]] X.max(axis=1).dimshuffle(0, 'x') 得到(axis=1是沿着列方向最大,就是每一行的最大) [[ 1.] [-0.]] 这里是每一元素减去每一行的最大值), [[-1. 0.] [-2. 0.]] T.exp(X - X.max(axis=1).dimshuffle(0, 'x'))。函数e^x [[0.36787944 1. ] [0.13533528 1. ]] T.exp(X - X.max(axis=1).dimshuffle(0, 'x')) * hm。再把正对焦元素拿出来 [[0. 1. ] [0.13533528 0. ]] e_x / e_x.sum(axis=1).dimshuffle(0, 'x'). 分母是每行加起来 [[1. ] [0.13533528]] 整体是 [[0. 1.] [1. 0.]]
tf怎么看运算结果?
initialize_all_variables之后sess.run给print out
使用tf.Variable时,如果检测到命名冲突,系统会自己处理。使用tf.get_variable()时,系统不会处理冲突,而会报错
value = [1, 1, 1, 1, -8, 1, 1, 1,1]
init = tf.constant_initializer(value)
W = tf.get_variable('W', shape=[3, 3], initializer=init)
init_op = tf.initialize_all_variables()
with tf.Session() as sess:
sess.run(init_op)
print('output:')
print(sess.run(W))
sess.close()
output:
[[ 1. 1. 1.]
[ 1. -8. 1.]
[ 1. 1. 1.]]
