

CAN协议,系统结构和帧结构
CAN:Controller Area Network,控制器局域网
是一种能有效支持分布式控制和实时控制的串行通讯网络。
CAN-bus: Controller Area Network-bus,控制器局域网总线技术
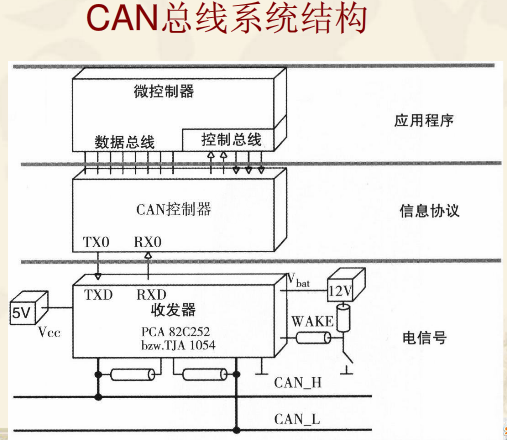
CAN总线系统结构
- CAN 控制器
接收控制单元中微处理器发出的数据,处理数据并传给CAN收发器
- CAN收发器
将数据传到总线 or 从总线接收数据给控制器
- CAN数据传递终端
避免数据传输终了反射回来
-
CAN数据总线
传输数据的数据线,两根 CAN-high and CAN-low,差分信号
CAN总线系统的数据传输
CAN总线节点上的节点发送数据是以报文的形式广播给网络中所有节点。收发器接收到数据就把数据传送给控制器,再由控制器检查判断是不是所需数据。不是则忽略。
- 网络上任何一个节点在任何时候都可以发送数据
- 多个节点发送数据,优先级低主动退出发送
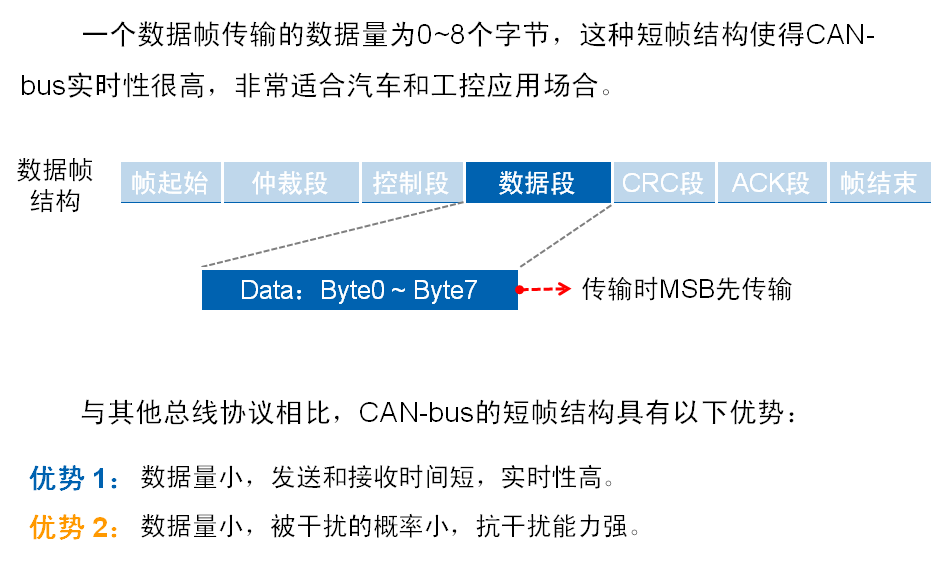
- 短帧结构,每帧数据信息为0~8字节(具体用户定义),对数据编码而不是地址编码
- CAN每帧都有CRC校验和其他检验措施,严重错误的情况下具有自动关闭输出的功能
CAN总线系统数据格式
CAN-bus通信帧共分为数据帧、远程帧、错误帧、过载帧和帧间隔
五种类型。
-
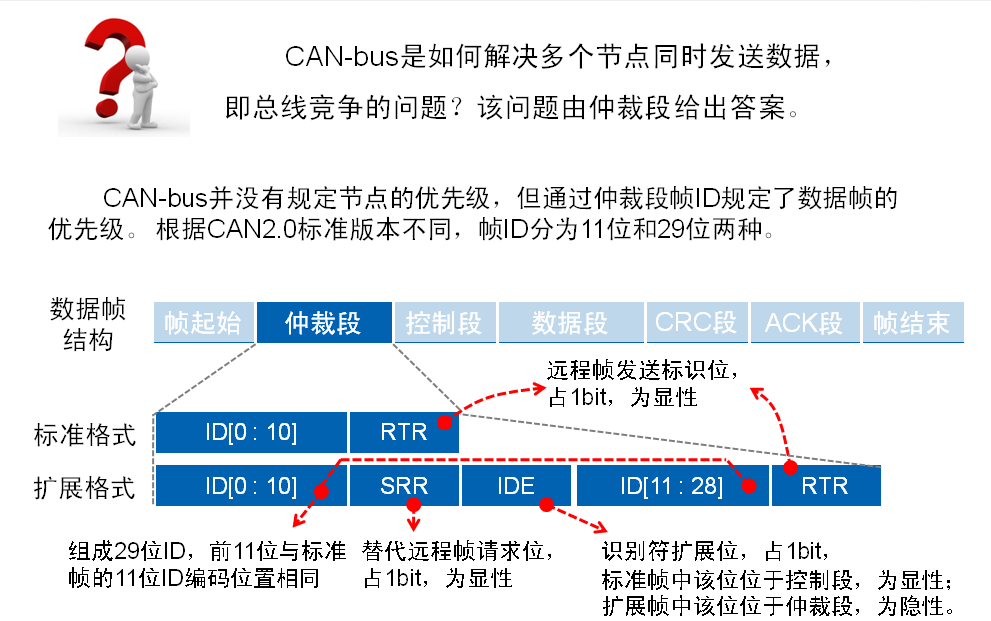
数据帧
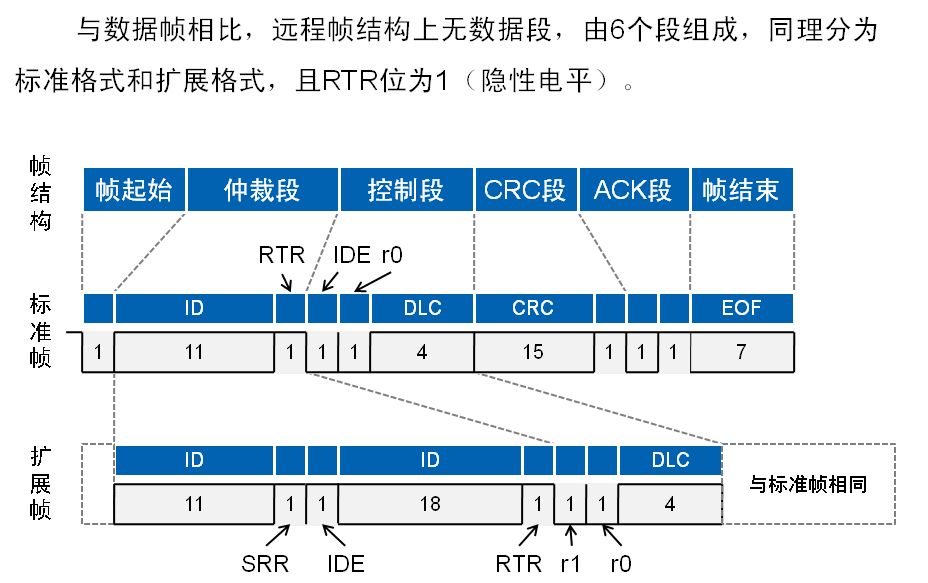
结构上由7个段组成,其中根据仲裁段ID码长度的不同,分为标准帧(CAN2.0A)和扩展帧(CAN2.0B)。
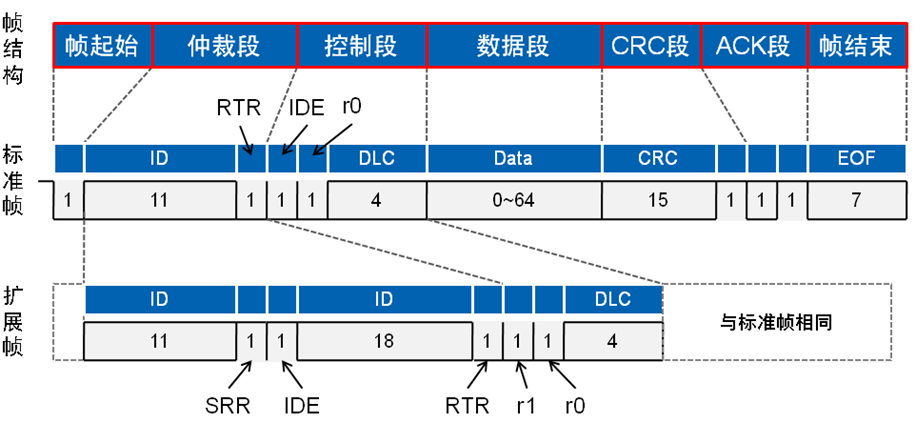
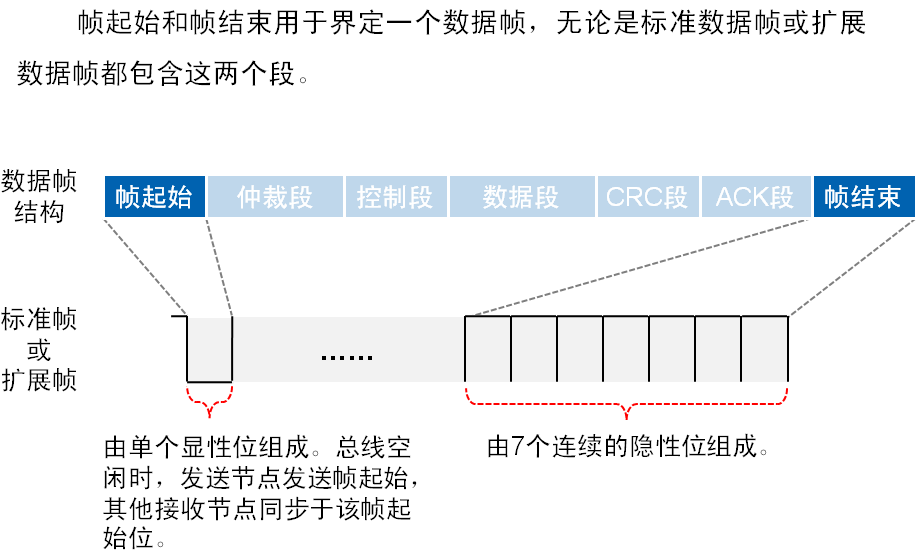
帧起始、帧结束
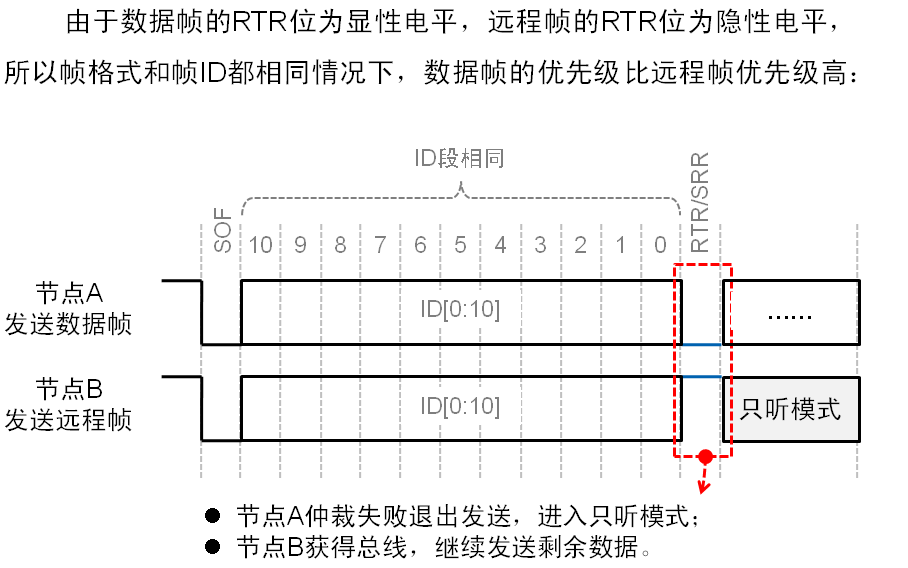
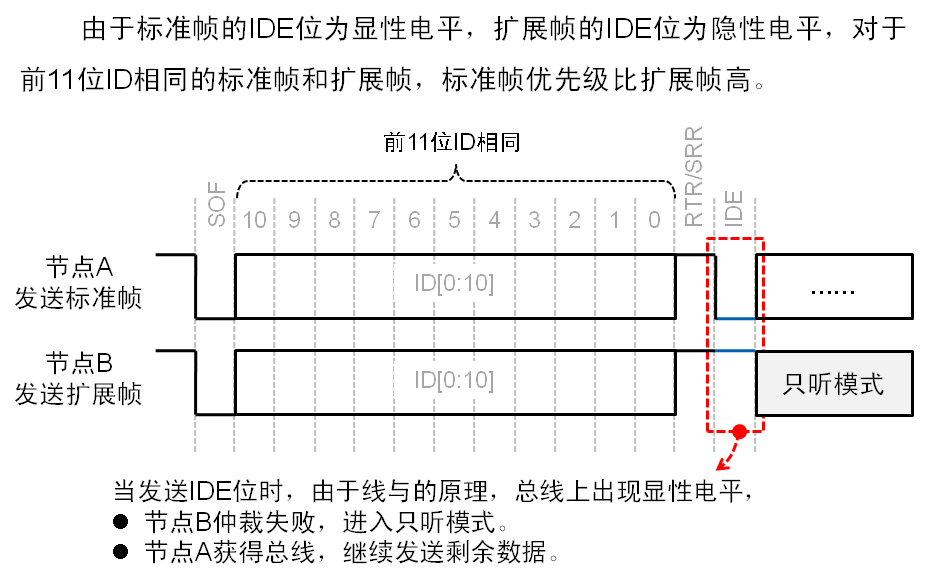
仲裁段
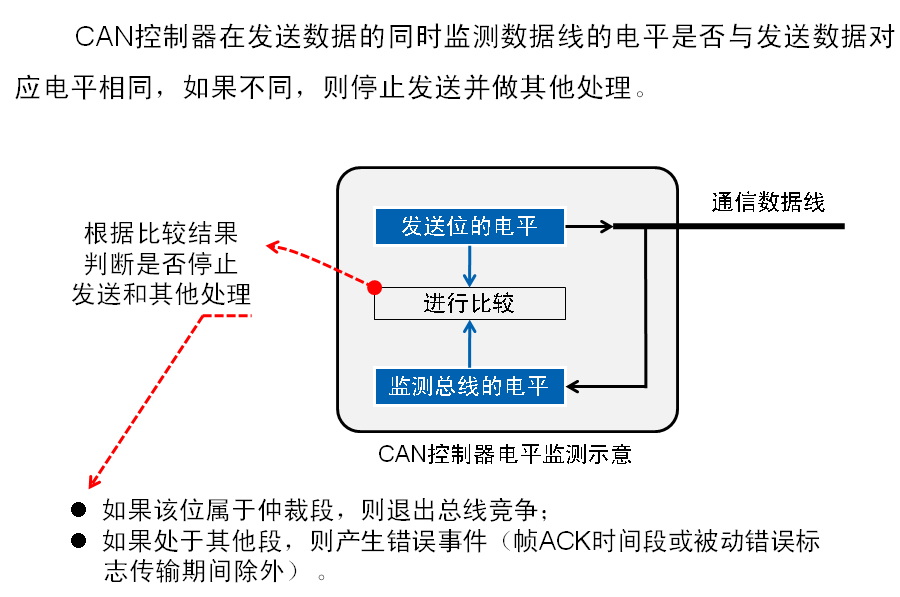
显性隐性
总线仲裁
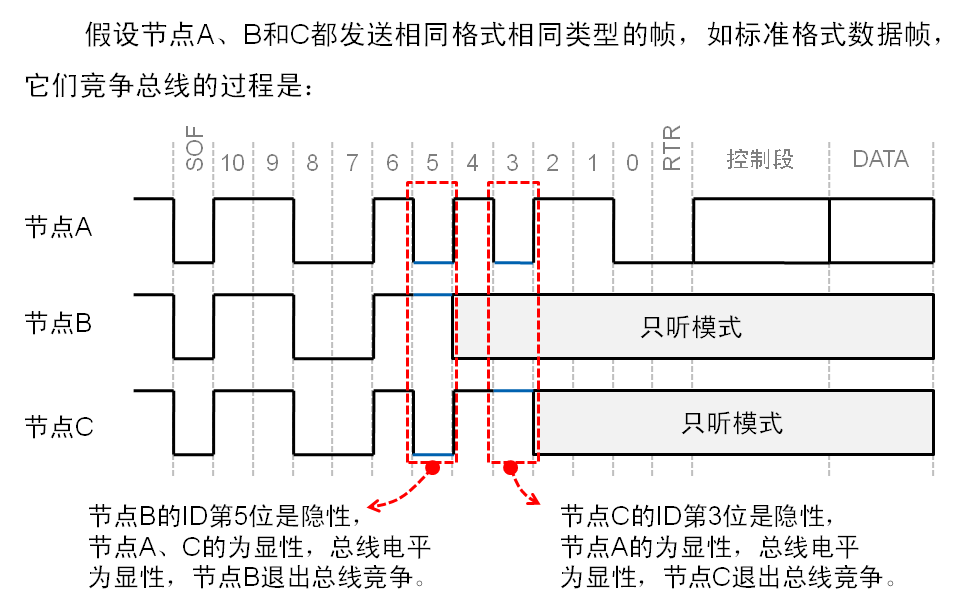
- 从该分析过程得出结论是:帧ID值越小,优先级越高
-
对于同为扩展格式数据帧、标准格式远程帧和扩展格式远程帧的情况同理。
![]()
![]()
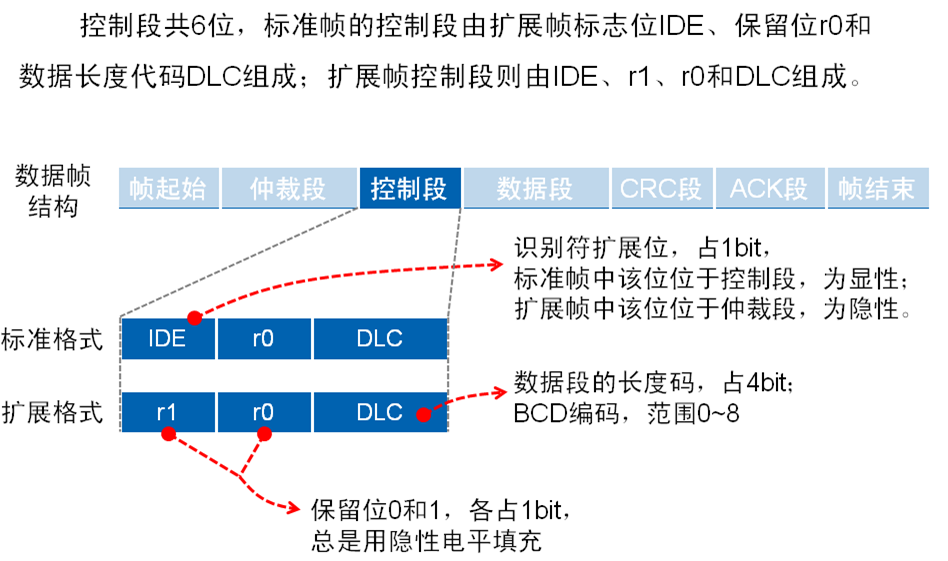
控制段
![]()
数据段
![]()
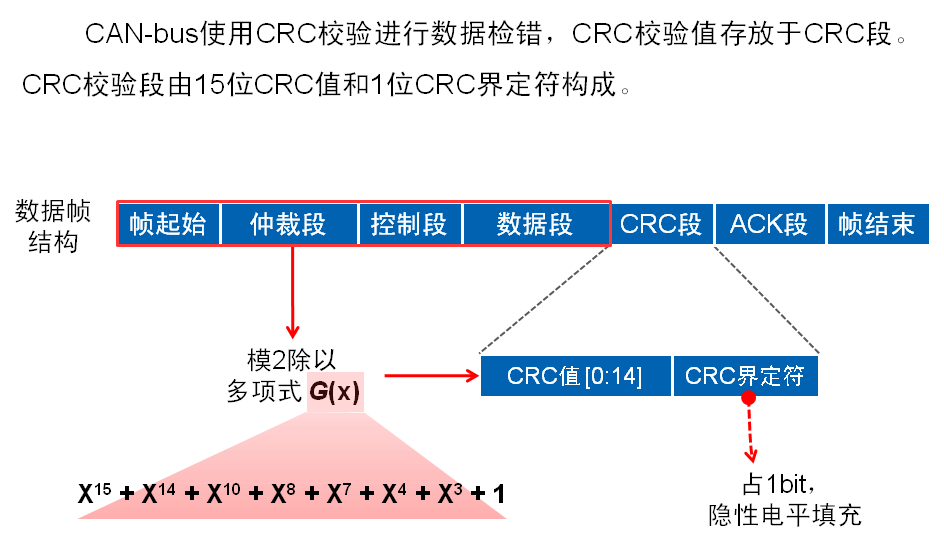
CRC段
![]()
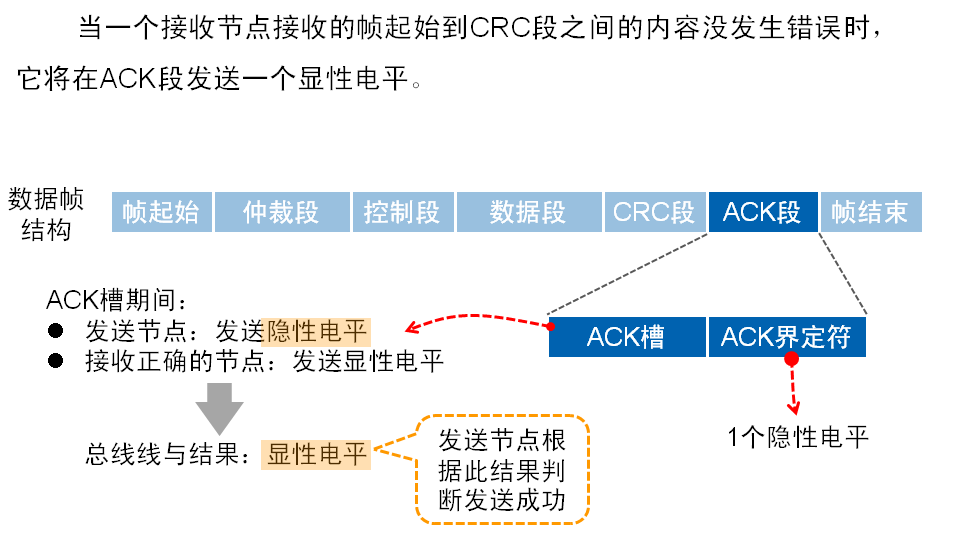
ACK段
![]()
远程帧
![]()
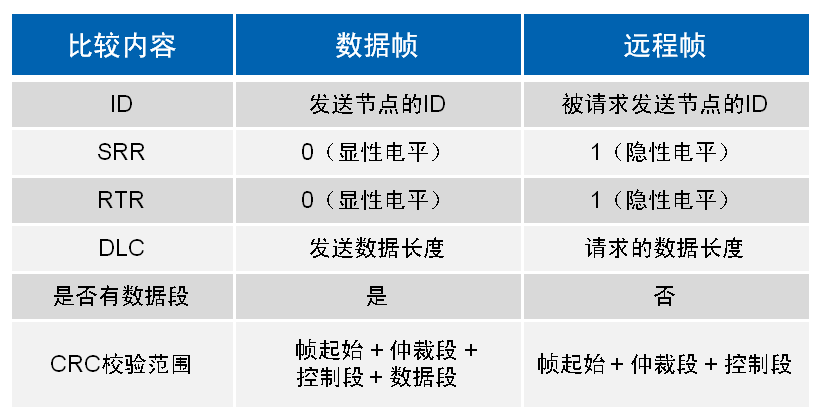
数据帧与远程帧的区别
![]()
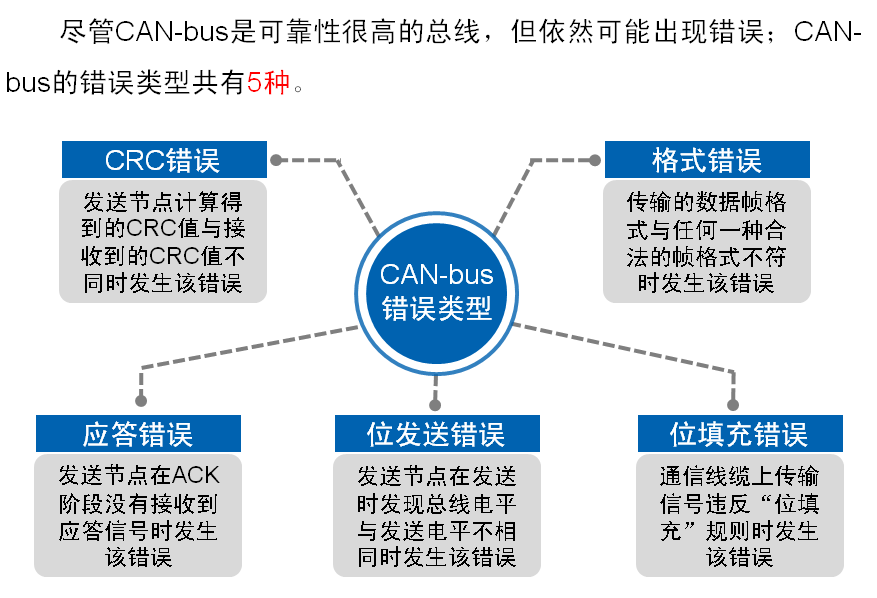
CAN-bus 错误类型
![]()
![]()
![]()
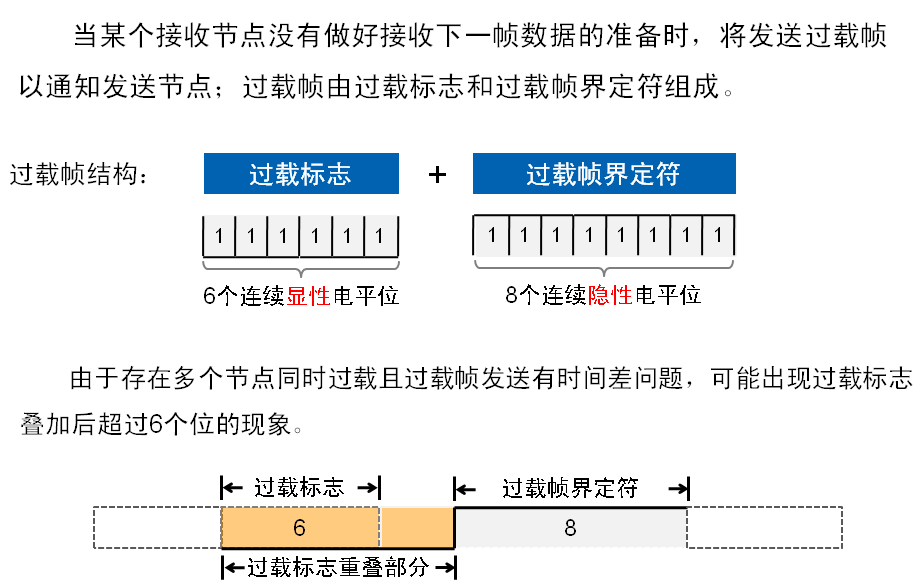
过载帧
![]()
帧间隔
![]()
![]()


 浙公网安备 33010602011771号
浙公网安备 33010602011771号