
全志_陀螺仪驱动
陀螺仪驱动
平台:全志A33
模块:MPU—6500A
方式:I2C 和 SPI
资料:链接:https://pan.baidu.com/s/1rKyTnKFmeDdop-NTAyBKDA
提取码:bwq6
一 I2C通信
i2c-dev.c // i2c 从设备层(自己编写)
i2c-core.c // i2c 核心层
i2c-sunxi.c // i2c 控制器层
mpu6500_i2c_drv.mod.c
mpu6500_i2c_app.cpp (交叉编译)
Android.mk
代码示例: https://www.cnblogs.com/panda-w/p/11136939.html
测试:
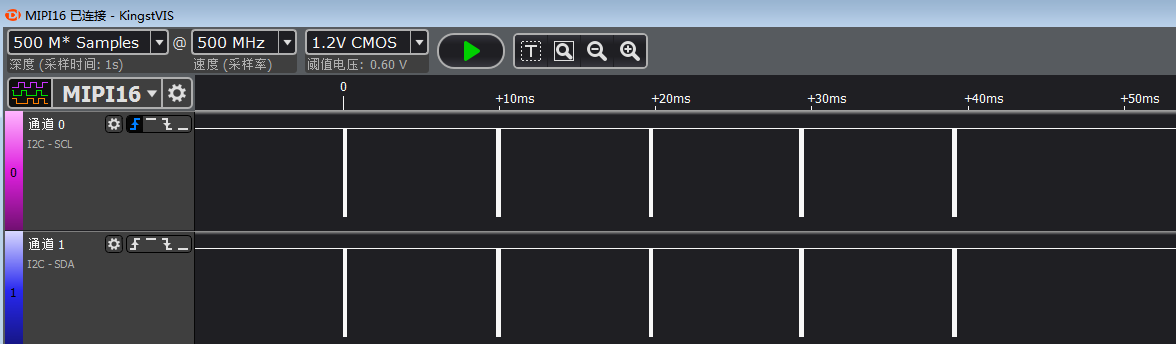
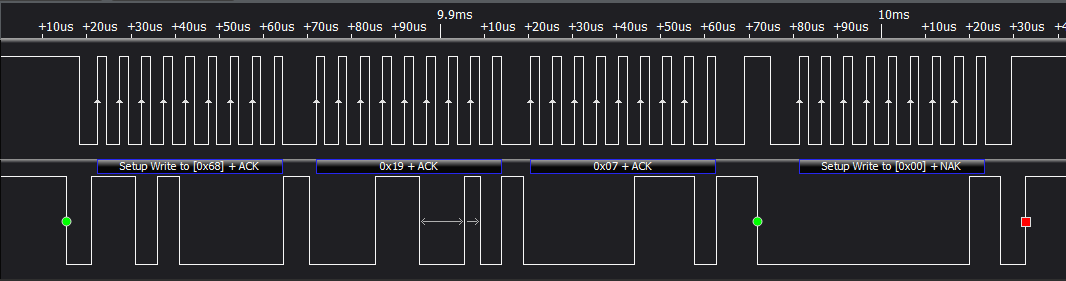
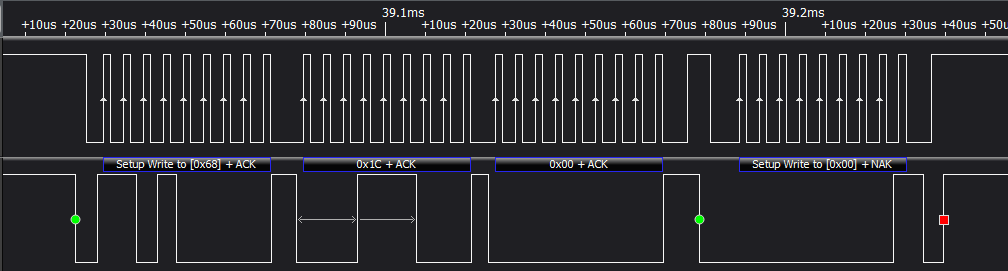
1. 看这是初始化的五个寄存器的波形
2. 电源管理,解除休眠——寄存器地址:0x6B

3. 设置陀螺仪采样率——寄存器地址:0x19
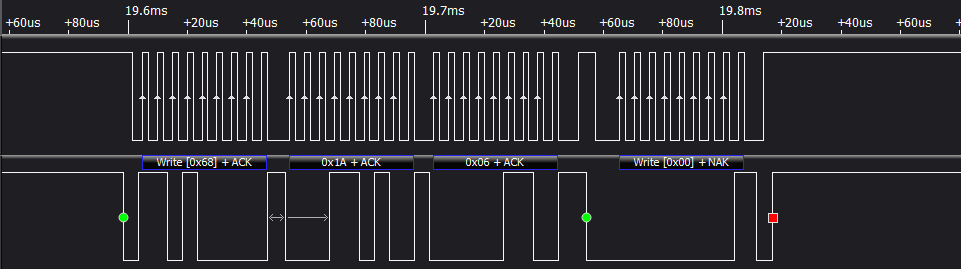
4. 设置低通滤波频率——寄存器地址:0x1A
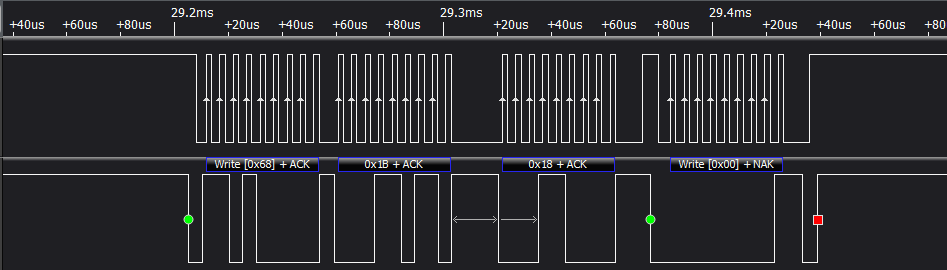
5. 设置陀螺仪自检——寄存器地址:0x1B
6. 设置加速计自检——寄存器地址:0x1C
7. 应用层读取输出:

二 SPI通信
spidev.c // spi 从设备层(自己编写)
spi.c // spi 核心层
spi-sunxi.c // spi 控制器层
mpu6500_spi_drv.mod.c
mpu6500_spi_app.cpp (交叉编译)
Android.mk
代码示例:
<笔记>
1.
Stay hungry, stay foolish
待续。。。

