

LSTM网络(Long Short-Term Memory )
本文基于前两篇 1. 多层感知机及其BP算法(Multi-Layer Perceptron) 与 2. 递归神经网络(Recurrent Neural Networks,RNN)
RNN 有一个致命的缺陷,传统的 MLP 也有这个缺陷,看这个缺陷之前,先祭出 RNN 的 反向传导公式与 MLP 的反向传导公式:
\[RNN : \ \delta_h^t = f'(a_h^t) \left (\sum_k\delta_k^tw_{hk} + \sum_{h'} \delta^{t+1}_{h'}w_{hh'} \right )\]
\[MLP : \ \delta_h = f'(a_h) \sum_{h'=1}^{h_{l+1}} w_{hh'}\delta_{h'}\]
注意,残差在时间维度上反向传递时,每经过一个时刻,就会导致信号的大幅度衰减,为啥呢,就是因为这个非线性激活函数 $f$ ,一般这个函数的形状如下图:
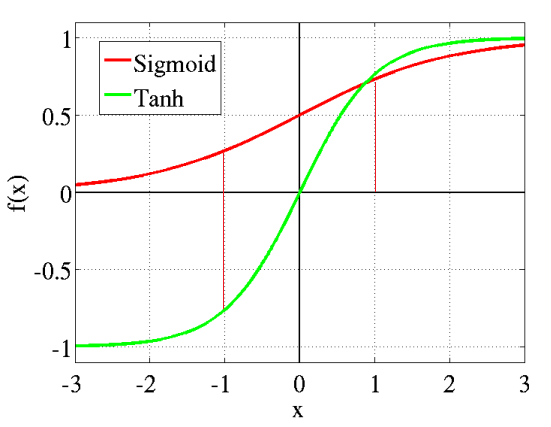
如上图所示,激活函数 $f$ 在在红线以外的斜度变化很小,所以函数 $f$ 的导数 $f'$ 取值很小,而经过以上列出的残差反向传递公式可以得出,每经过一个时刻,衰减 $f'$ 的数量级,所以经过多个时刻会导致时间维度上梯度呈指数级的衰减,即此刻的反馈信号不能影响太遥远的过去 。在 MLP 中,如果网络太深,这种梯度衰减会导致网络的前几层的残差趋近于 0 ,这意味着前面的隐藏层中的神经元学习速度要慢于后面的隐藏层。无论 RNN 还是 MLP ,对参数的导数都是这种形式(RNN需要在时间维度上求和):
\[\frac{\partial O}{\partial w_{ij}} = \frac{\partial O}{\partial a_{j}} \frac{\partial a_j}{\partial w_{ij}} = \delta_jb_i\]
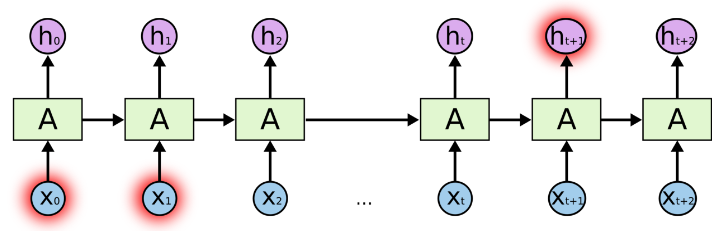
残差衰减的太小导致参数的导数太小 ,从而梯度下降法中前几层的参数只有微乎其微的变化,对于深层的 MLP 由于梯度衰减导致效果不如浅层的网络,对于 RNN 就会导致不能处理长期依赖的问题,虽然 RNN 理论上可以处理任意长度的序列,但实习应用中,RNN 很难处理长度超过 10 的序列。这种现象叫做 gradient vanishing/exploding 。下图形象的描绘了这种现象:
对于 $t=1$ 的输入,随着时间的推移,对于 $t >1$ 时刻的产生的影响会越来越小,由图中的颜色的深浅代表信号的大小。这种衰减会导致 RNN 无法处理长期依赖,举个例子,当有一句话“I grew up in France … I speak fluent French.” 在预测该人会将一口流利的 语时,会依赖之前他的长大的环境,而序列中两个词语的间隔太大,这便是所说的长期依赖问题。
对于长期以来问题,反向传播时,梯度也会呈指数倍数的衰减,这种衰减现象导致 RNN 无法处理长期依赖,为了克服 RNN 的这种缺陷,学者们研究了众多方法,其中 Long Short-Term Memory 表现最为出色。使用 LSTM 模块后,当误差从输出层反向传播回来时,可以使用模块的记忆元记下来。所以 LSTM 可以记住比较长时间内的信息。
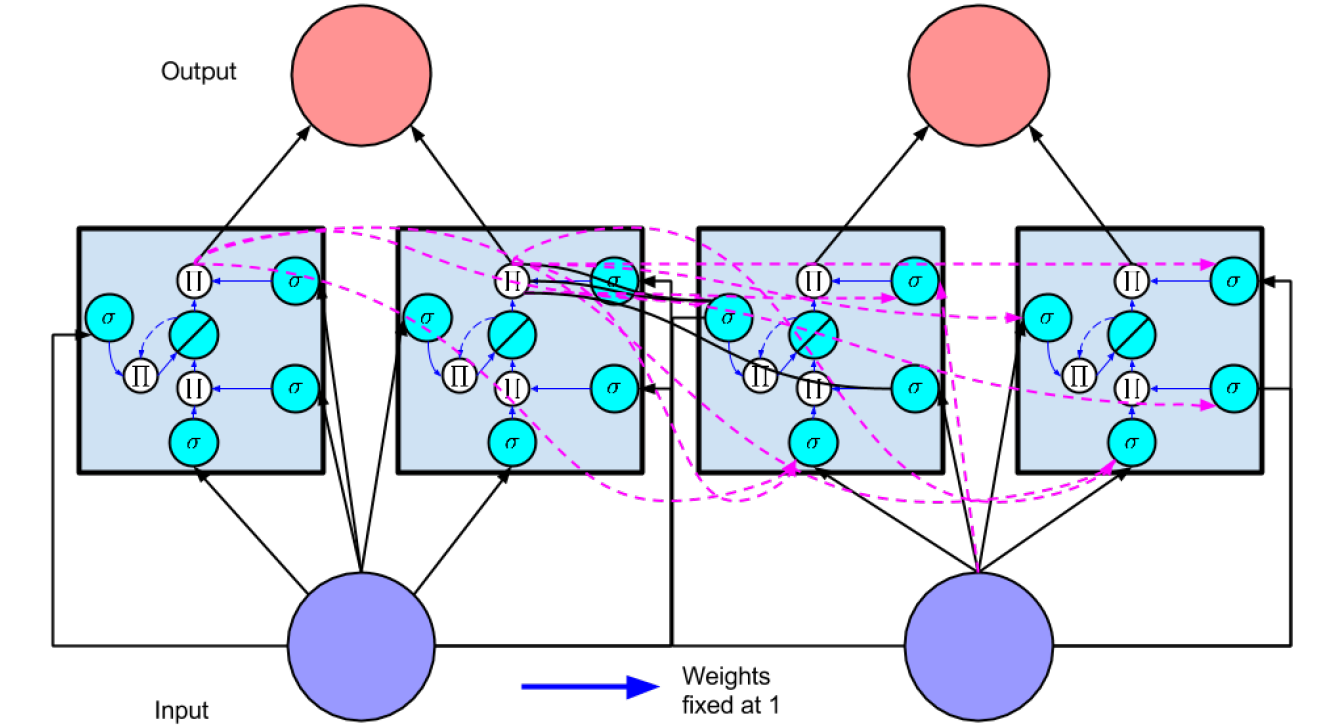
初始的 LSTM (Hochreiter and Schmidhuber ,1997)网络结构类似于 RNN ,只是把 RNN 的隐层换成了存储块(memeory block),如下图左所示, memory block 中用记忆单元 (memory cell)来保存信息(类似于 RNN 中的隐藏节点),,每个存储块包含一个或多个memory cell ,如下图左中间的 “$\oslash$” 节点如下图所示,蓝色虚线为一条递归自连接的权值为 1 的边,保证梯度沿时间传播时不会损失,在时刻 $t$ 的输入如下图的 $g^t$ 所示,除接受本时刻的输入 $x^t$ 外,还接受上一时刻的输出 $h^{t-1}$ ,并且经过非线性激活函数 $\sigma$ ,LSTM 并不是接纳所有输入 $g^t$ ,而是在网络中加入两个门,输入门(input gate)、输出门(output gate), 门的节点数目与 memory cell 一一对应, input gate 如下图的 $i^t$ 所示,跟输入层一样,接受 $x^t$ 与 $h^{t-1}$ ,经过 $\sigma$ 后产生一个 0-1 向量(维度即为 memory cell 或者 input gate 的维度),0 代表关闭 、1 代表开启,这样来对输入进行控制,下图左中的 “$\prod$ ” 表示 input gate 的输出 $i^t$ 与本时刻输入 $g^t$ 的输出逐元素相乘,即 input gate 会对输入进行过滤 ,然后存放到 memory cell 里,现在memory cell 里既有上一时刻 $t-1$ 的状态,又添加了时刻 $t$ 的状态, 即
\[s^t = g^t \odot i^t + s^{t-1}\]
memory cell 有一个循环自连接的权值为 1 的边,这样 memory cell state 中梯度沿时间传播时不会导致不会 vanishing 或者 exploding ,output gate 类似于 input gate 会产生一个 0-1 向量来控制 memory cell 到输出层的输出。即
\[ v^t = s^t \odot o^t \]
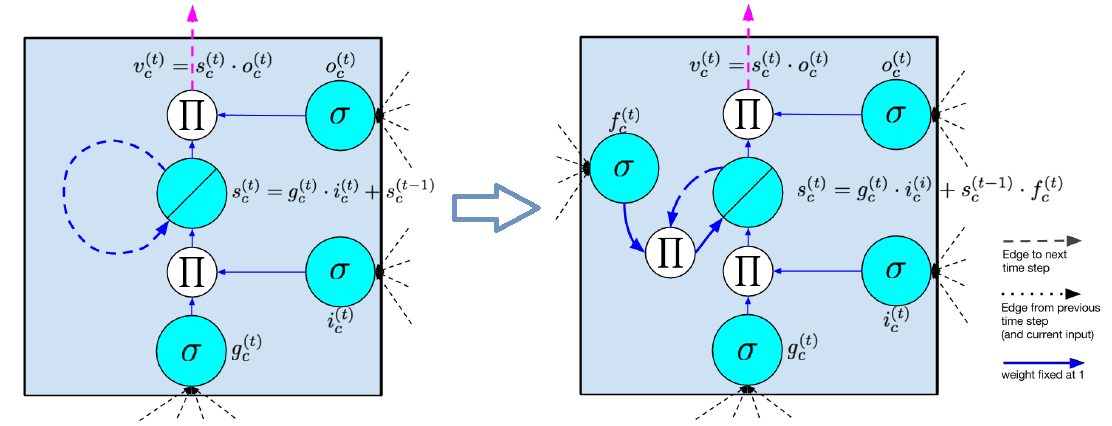
后来为了增强 LSTM 的处理能力, Gers et al. [2000] 引入了 forget gate, LSTM 的网络结构变成了如上图右所示,也就是说 forget gate 取代了之前权值为 1 的边,经过这样的改进,memory cell 可以遗忘之前的内容,只需将 memory cell 中的内容与 forget gate 逐元素相乘即可, forget gate 与 input/output gate 一样,接受 $x^t$ 与 $h^{t-1}$ 作为输入,现在的 LSTM memory cell 的更新公式为:
\[s^t = g^t \odot i^t + f^t \odot s^{t-1}\]
Gers & Schmidhuber [2000] 在以上结构的基础上又提出了 peephole connections ,将 $t-1$ 时刻没有经过 output gate 处理过的 memory cell 状态送到时刻 $t$ 作为 input gate 和 output gate 的输入,即三个门的输入增加了了 $s^ {t-1}$ ,现在流行的网络结构如下图所示:
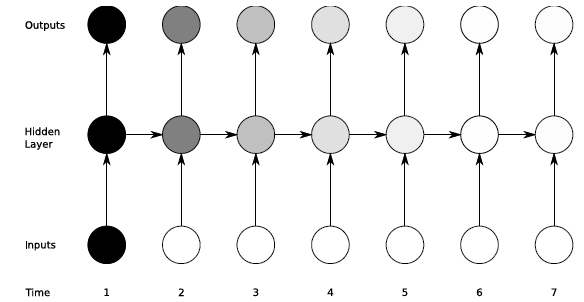
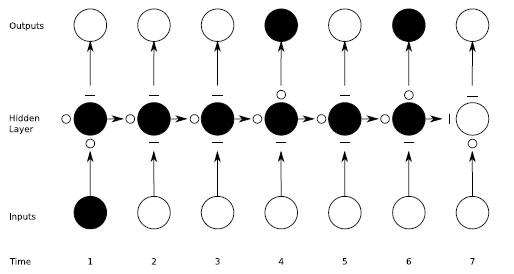
三个门协作使得 LSTM 存储块可以存取长期信息,比如说只要输入门保持关闭,记忆单元的信息就不会被之后时刻的输入所覆盖。下图形象的描述了这个过程,在 Hidden Layer 中每个节点都是一个 memeory block ,每个 memeory block 的包含三个门,左边为 forget gate ,下边尾 input gate ,上边为 output gate ,门有打开关闭两种状态,分别由 "$\bigcirc $" 与 "$-$" 来表示。可见对于时刻 1 的输入,只要之后时刻的 input gate 保持关闭,forget gate 保持打开,便可以在不影响 memory cell 的情况下随时开启 output gate 来获得 memory cell 的内容。对于梯度反向传播时,同样可以通过这种方式来保持残差不会过度衰减。
接下来本文所涉及的将是详细 LSTM 的 BP 过程,网络结构采用的是 Gers & Schmidhuber [2000]所提出的 LSTM 结构,值得注意的是,这里对 memory cell 的输出增加了激活函数 $h$ , 之前的 $h$ 可以理解为线性的,这里先声明一些符号表示: $w_{ij}$ 表示 单元 $i$ 到单元 $j$ 的权值,$a_j^t$ 表示时刻 $t$ 单元 $j$ 的输入,$b_j^t = f(a_j^t)$ 表示对单元 $j$ 的输入做非线性映射,$\iota$ 、 $\phi$ 、 $\omega$ 分别代表 input gate 、forget gate、 output gate ,$C$ 用来表示 memroy cell 的数量, $s^t_c$ 表示 memeory cell $c$ 在时刻 $t$ 的状态, $f$ 表示门的激活函数(通常为 $sigmod$ 函数), $g$ 与 $h$ 分别表示 memory cell 输入与输出的激活函数,用 $I$ 表示输入层大小, $H$ 表示隐层 memory cell 的大小(其实 $H = C$,这里只是为了方便表示,因为 memory cell 的输出 $b_h^t$ 会往下个时刻传输,其权值可表示为 $w_{h.}$ , memrory cell 本身的权值可用 $w_ {c.}$ 来表示) , $K$ 表示输出层的大小。 待序列为 $t = 1...T$ ,时刻 $t$ 的输入为 $x^t$ ,注意 $b^0 = 0$ , 残差 $\delta ^{T+1} = 0$ 。
- forget gate : 在 LSTM 的 memory block 中,只有上一时刻 memory cell 的输出 $ b_h^t$ 会传送到本单元 ,其他数据比如 memory cell state 或者 memory cell input 等只在单元内部可见,forget gate 是用来控制上个时刻的 memory cell state 即 $s^{t-1}$ :
\[a^t_{\phi } = \sum_iw_{i \phi } x_i^t + \sum_hw_{h \phi}b_{h}^{t-1}+ \sum_cw_{c\phi}s_c^{t-1} \]
\[b_{\phi }^t = f(a_{\phi}^t)\]
- input gate : 这个门控制当前时刻 memory cell state 的输入:
\[a^t_{\iota } = \sum_iw_{i \iota } x_i^t + \sum_hw_{h \iota}b_{h}^{t-1}+ \sum_cw_{c\iota}s_c^{t-1} \]
\[b_{\iota }^t = f(a_{\iota}^t)\]
- memory cell : 对于时刻 $t-1 \rightarrow t$ , memroy cell 的信息是这样变化的 ,首先对 $t-1$ 时刻 memory cell 的状态用 forget gate 进行过滤($b_{\phi}^t s_c^{t-1}$),看要遗忘或者保存哪些信息,然后获取现在时刻 $t$ 的输入信息($g(a_c^t)$),用 input gate 进行过滤 ($b_{\iota }^tg(a_c^t)$),过滤完后相加就完成了$t-1 \rightarrow t$ 时刻的 memory cell 状态的转变 :
\[a^t_c = \sum_i w_{ic} x_i^t + \sum_h w_{hc}b_{h}^{t-1} \]
\[s_c^t = b_{\phi}^t s_c^{t-1} + b_{\iota }^tg(a_c^t)\]
- output gate : 这个门会控制 cell state 的输出:
\[a^t_{\omega } = \sum_iw_{i \omega } x_i^t + \sum_hw_{h \omega }b_{h}^{t-1}+ \sum_cw_{c\omega }s_c^{t} \]
\[b_{\omega }^t = f(a_{\omega }^t)\]
- memory cell output : 计算 memory cell 的输出 ,由 output gate 控制,这个输出也会作为下一时刻整个 memory block 的输入(类似于 RNN 的隐层传递)
\[b_c^t = b_{\omega}^t h(s_c^t)\]
接下来便是残差的反向传导,对于输出层,同 RNN 一般是 $softmax$ 或者 $logistic$ ,这里首先定义:
\[\epsilon_c^t=\frac{\partial O}{\partial b_c^t}=\sum_k\frac{\partial O}{\partial a_k^t} \frac{\partial a_k^t}{\partial b_c^t}+\sum_{h}\frac{\partial O}{\partial a_h^t} \frac{\partial a_h^t}{\partial b_c^t}=\sum_{k} w_{ck}\delta_k^t+\sum_hw_{ch}\delta_h^{t+1} \]
接下来,残差传导至 output gate :
\[\delta_\omega^t=\frac{\partial O}{\partial a_\omega^t}=\sum_c \frac{\partial O}{\partial b_c^t}\frac{\partial b_c^t}{\partial b_\omega^t}\frac{\partial b_\omega^t}{\partial a_\omega^t} =f'(a_\omega^t)\sum_c \epsilon_c^t h(s_c^t) \]
现在再定义一个辅助变量:
\[\epsilon_s^t=\frac{\partial \mathcal{L}}{\partial s_c^t}
=\frac{\partial O}{\partial b_c^t} \frac{\partial b_c^t}{\partial h(s_c^t)} \frac{\partial h(s_c^t)}{\partial s_c^t}
+\frac{\partial O}{\partial s_c^{t+1}} \frac{\partial s_c^{t+1}}{\partial s_c^t}
+\frac{\partial O}{\partial a_\omega^t} \frac{\partial a_\omega^t}{\partial s_c^t}
+\frac{\partial O}{\partial a_\iota^t} \frac{\partial a_\iota^t}{\partial s_c^t}
+\frac{\partial O}{\partial a_\phi^t} \frac{\partial a_\phi^t}{\partial s_c^t} \Rightarrow\]
\[\epsilon_s^t=b_w^th'(s_c^t)\epsilon_c^t+b_\phi^{t+1}\epsilon_s^{t+1}+w_{c\omega}\delta_\omega^t+w_{c\iota}\delta_\iota^{t+1} +w_{c\phi}\delta_\phi^{t+1}\]
这就是 bp 中最复杂的公式了,依次解释下各项。首先,看memory block的图,查看该单元指向输出单元的所有路径,没有一条不同的路径就代表一项;然后运用链式法则展开每个路径;就得到后向传播中该单元的梯度$\delta$。这个辅助变量中可以看到后三项来自于cell state 对三个 gate 的监督,即 peephole ,所以若不采用 peephole 的方式就可以省略。第二项来自于下一时刻的状态误差,其实是 forget gate 对当前状态的调节作用。
接下来误差传播到 memory cell :
\[\delta_c^t =\frac{\partial O}{\partial a_c^t}=\frac{\partial O}{\partial s_c^t}\frac{\partial s_c^t}{\partial g(a_c^t)}\frac{\partial g(a_c^t)}{\partial a_c^t}=\epsilon_c^t b_\iota^t g'(a_c^t)\]
最后分别传导至 forget gate $\phi$ 与 输入门 $\iota$:
\[\delta_\phi^t =\frac{\partial O}{\partial a_\phi^t}=\sum_c\frac{\partial O}{\partial s_c^t}\frac{\partial s_c^t}{\partial b_\phi^t}\frac{\partial b_\phi^t}{\partial a_\phi^t}=f'(a_\phi^t)\sum_c s_c^{t-1}\epsilon_s^t \]
\[\delta_\iota^t =\frac{\partial O}{\partial a_\iota^t}=\sum_c\frac{\partial O}{\partial s_c^t}\frac{\partial s_c^t}{\partial b_\iota^t}\frac{\partial b_\iota^t}{\partial a_\iota^t}=f'(a_\iota^t)\sum_c g(a_c^{t-1})\epsilon_s^t\]
残差传导完成后,直接用残差对权重 $w_{ij}$ 进行求导即可 (这里 $b_i^t$ 可代表输入 $x_i^t$、$b_h^{t-1}$、$s_c^{t-1}$):
\[\frac{\partial O}{\partial w_{ij}} = \sum_t \frac{\partial O}{\partial a_j^t}\frac{\partial a_j^t}{\partial w_{ij}} = \sum_t \delta_j^tb_i^t\]
参考:http://colah.github.io/posts/2015-08-Understanding-LSTMs/
Supervised Sequence Labelling with Recurrent Neural Networks
http://ethancao.cn/2015/12/07/learning-LSTM.html

