

递归神经网络(Recurrent Neural Networks,RNN)
在深度学习领域,传统的多层感知机(MLP)具有出色的表现,取得了许多成功,它曾在许多不同的任务上——包括手写数字识别和目标分类上创造了记录。甚至到了今天,MLP在解决分类任务上始终都比其他方法要略胜一筹。尽管如此,大多数专家还是会达成共识:MLP可以实现的功能仍然相当有限。究其原因,人类的大脑有着惊人的计算功能,而“分类”任务仅仅是其中很小的一个组成部分。我们不仅能够识别个体案例,更能分析输入信息之间的整体逻辑序列。这些信息序列富含有大量的内容,信息彼此间有着复杂的时间关联性,并且信息长度各种各样。这是传统的MLP所无法解决的,RNN 正式为了解决这种序列问题应运而生,其关键之处在于当前网络的隐藏状态会保留先前的输入信息,用来作当前网络的输出。
许多任务需要处理序列数据,比如Image captioning, speech synthesis, and music generation 均需要模型生成序列数据,其他领域比如 time series prediction, video analysis, and musical information retrieval 等要求模型的输入为序列数据,其他任务比如 机器翻译,人机对话,controlling a robot 的模型要求输入输出均为序列数据。 RNN 模型可以用来处理序列数据, RNN 包含了大量参数,且难于训练(时间维度的 vanishing/exploding),所以出现一系列对 RNN 优化 ,比如网络结构、求解算法与并行化。今年来 bidirectional RNN (BRNN)与 LSTM 在 image captioning, language translation, and handwriting recognition 这几个方向上有了突破性进展 。下面从 RNN 开始来逐一介绍这些网络模型。
RNN 的结构不同于 MLP ,输入层与来自序列中上一元素隐层的信号共同作用到当前的隐藏层,如下图所示:

下图能更清楚的展示 RNN 的结构:
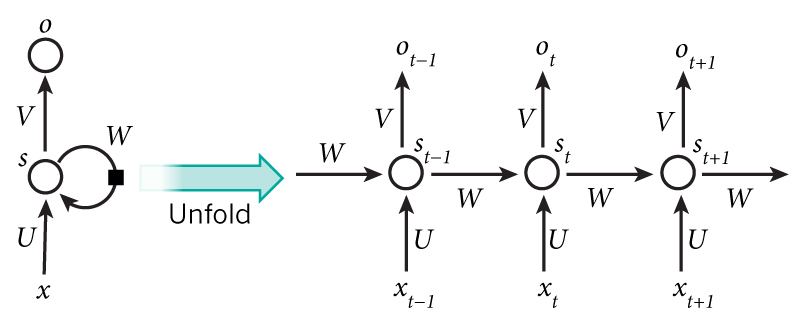 看下面关于 RNN BP分析之前,请确保之前看过 多层感知机及其BP算法(Multi-Layer Perceptron),此文为 RNN BP 的基础,现在来看 RNN 的 BP 算法,对于长度为 $T$ 的序列 $x$ ,RNN 的输入层大小为 $I$ ,隐层大小为 $H$ ,输出层大小为 $K$ ,可以得到上图中三个矩阵的维度分别为 : $U \in \mathbb{R}^{I \times H} , W \in \mathbb{R}^{H \times H} , V \in \mathbb{R}^{H \times K} $ ,这里 $x^t$ 代表序列第 $t$ 项 的输入, $a^t$ 代表第 $t$ 项隐层的输入,$b^t$ 代表对 $a^t$ 做非线性激活也即为神经网络的输出 ,这里 $a^t$ 由输入层 $x^t$ 与 上一层隐层的输出 $b^{t-1}$ 共同决定:
看下面关于 RNN BP分析之前,请确保之前看过 多层感知机及其BP算法(Multi-Layer Perceptron),此文为 RNN BP 的基础,现在来看 RNN 的 BP 算法,对于长度为 $T$ 的序列 $x$ ,RNN 的输入层大小为 $I$ ,隐层大小为 $H$ ,输出层大小为 $K$ ,可以得到上图中三个矩阵的维度分别为 : $U \in \mathbb{R}^{I \times H} , W \in \mathbb{R}^{H \times H} , V \in \mathbb{R}^{H \times K} $ ,这里 $x^t$ 代表序列第 $t$ 项 的输入, $a^t$ 代表第 $t$ 项隐层的输入,$b^t$ 代表对 $a^t$ 做非线性激活也即为神经网络的输出 ,这里 $a^t$ 由输入层 $x^t$ 与 上一层隐层的输出 $b^{t-1}$ 共同决定:
\[a_h^t =\sum_iw_{ih}x_i^t +\sum_{h'}w_{h'h}b_{h'}^{t-1}\]
\[b_h^t = f(a_h^t)\]
这里 序列从状态 $t=1$开始,一般设置 $b^0 = 0 $ 即可,接下来将隐层传导至输出层即可,通常 RNN 的输出层采用与传统 MLP 的类似的 $softmax$ 来进行分类任务.即输出层的输出为:
\[a_k^t = \sum_hw_{hk}b_h^t\]
\[y_k^t = \frac{e^{a_k^t}}{\sum_j e^{a_j^t}}\]
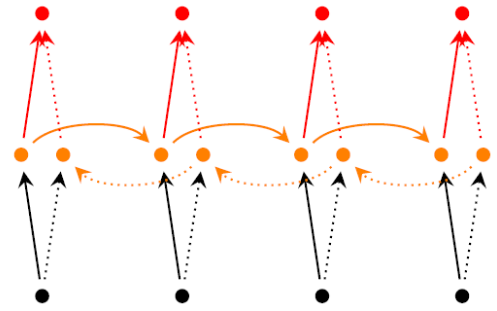
注意 RNN 中由于输入时叠加了之前的信号,所以反向传导时不同于传统的 MLP ,因为对于时刻 $t$ 的输入层,其残差不仅来自于输出,还来自于之后的隐层入下图所示:
时刻 $t$ ,RNN 输出层的算残差项同 MLP 为 $ \delta_k^t = y_k^t-z^t_k$,由于前向传导时隐层需要接受上一个时刻隐层的信号,所以反向传导时根据 BPTT 算法,隐层还需接收下一时刻的隐层的反馈:
\[\delta_h^t = f'(a_h^t) \left (\sum_k\delta_k^tw_{hk} + \sum_{h'} \delta^{t+1}_{h'}w_{hh'} \right )\]
当序列长度为 $T$ ,则残差 $\delta^{T+1}$ 均为 0 。并且整个网络其实就只有一套参数 $U$、$V$、$W$ , 对于时刻 $t$ 其倒数分别为:
\[U: \ \frac{\partial O}{\partial w_{ih}}= \frac{\partial O}{\partial a_h^t}\frac{\partial a_h^t}{\partial w_{ih}}=\delta_h^tx_i^t\]
\[V: \ \frac{\partial O}{\partial w_{hk}}= \frac{\partial O}{\partial a_k^t}\frac{\partial a_k^t}{\partial w_{hk}}=\delta_k^tb_h^t\]
\[W: \ \frac{\partial O}{\partial w_{h'h}}= \frac{\partial O}{\partial a_h^t}\frac{\partial a_h^t}{\partial w_{h'h}}=\delta_k^tb_{h'}^t \]
为了方便表示,写成统一的形式(假设对输入层有 $x_i^t = a_i^t =b_i^t$):
\[\frac{\partial O}{\partial w_{hij}}= \frac{\partial O}{\partial a_j^t}\frac{\partial a_j^t}{\partial w_{ij}}=\delta_j^tb_i^t\]
最后,由于 RNN 的递归性 ,对于时刻 $t = 1,2,...,T$ ,将其进行求和即可,下面为最终得 RNN 网络的关于权重参数的导数:
\[\frac{\partial O}{\partial w_{ij}}= \sum_t\frac{\partial O}{\partial a_j^t}\frac{\partial a_j^t}{\partial w_{ij}} = \sum _t \delta_j^tb_i^t\]
Bidirectional RNNs
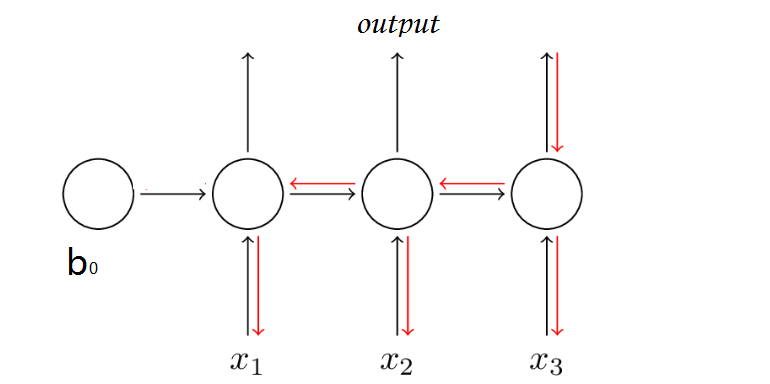
RNN 中对于当前时刻 t 通常会考虑之前时刻的信息而没有考虑下文的信息,Bidirectional RNNs 克服了这一缺点,其引入了对下文的考虑,其结构如下:
可见 BRNN 引入了一套额外的隐层,但是输入与输出层是共享的,多了一个隐层意味着多了三套参数分别为 $U'$、$V'$、$W'$ 。BRNN 的训练算法类似于 RNN ,forward pass 的过程如下:
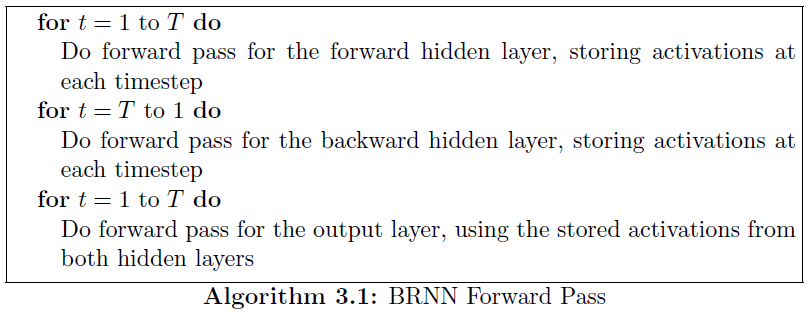
backward pass 的过程如下:
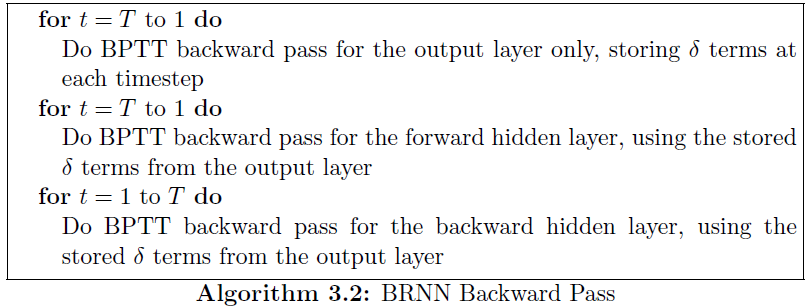
计算完残差后,分别对前向参数 $U$、$V$、$W$ 后向参数 $U'$、$V'$、$W'$ 求导即可,至此 BRNN 的训练算法介绍完毕, 目前 ,BRNN 在 NLP 的序列标注任务中取得了极大的成功。

