ROS学习笔记(二) :使用roslaunch
roslaunch
roslaunch是ros自带的一个库,使用roslaunch可以同时运行多个节点,通过编写launch文件来配置各个节点
roslaunch的使用
以turtlesim为例
首先保证环境变量中是否有catkin_ws工作空间的路径
echo $ROS_PACKAGE_PATH
若无,则进入该工作空间的根目录,执行
source devel/setup.bash
之后在任意目录下都可以进入之前创建的程序包
roscd beginner_tutorials
新建launch文件夹,在里面创建launch文件
mkdir launch
gedit turtlemimic.launch
拷贝以下launch文件的内容:
http://wiki.ros.org/cn/ROS/Tutorials/UsingRqtconsoleRoslaunch
<launch>
<group ns="turtlesim1">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<group ns="turtlesim2">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<node pkg="turtlesim" name="mimic" type="mimic">
<remap from="input" to="turtlesim1/turtle1"/>
<remap from="output" to="turtlesim2/turtle1"/>
</node>
</launch>
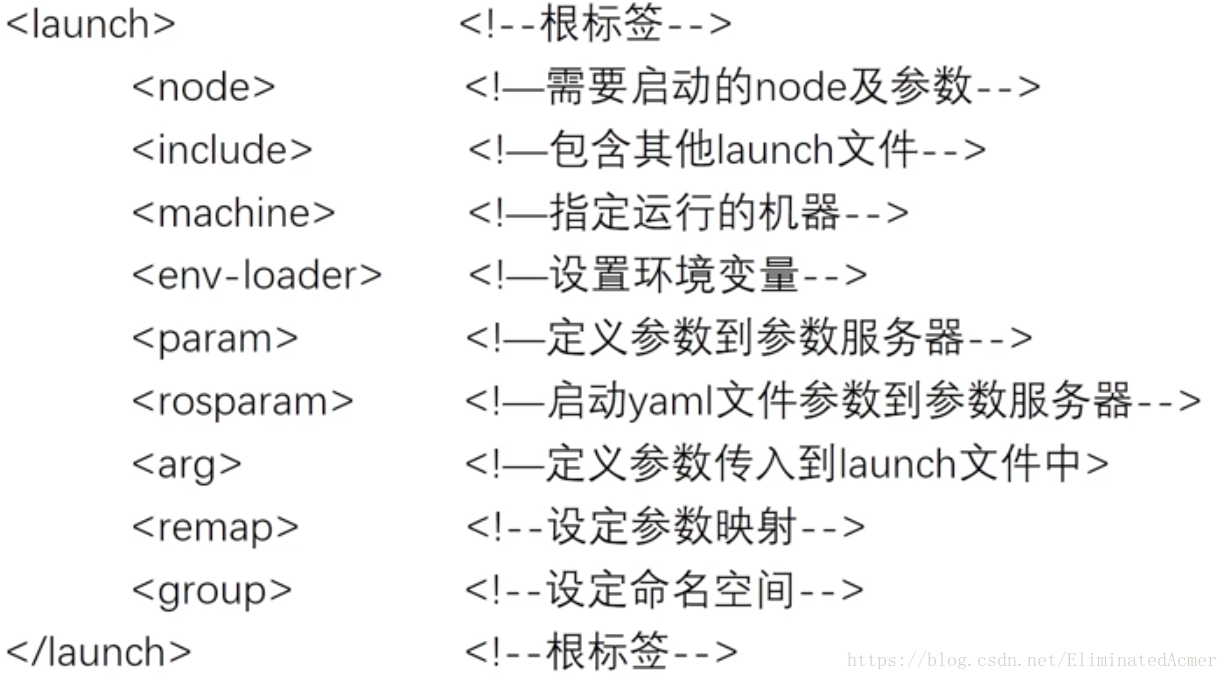
launch文件的格式是XML
下面先简单说一下各个标签、属性的意思:
多个组的节点
-
group 标签, 里面包含的是一个组内的定义,其属性
- ns(namespace)定义了组名,用于区分不同组
-
node 标签,里面包含的是一个节点的定义,属性:
- pkg说明该node所在pkg的名字
- type说明该node的名字
- name相当于为当前的node起一个别名(可以不起别名,默认值与type属性一致,但有时会造成歧义,比如在组内定义两个同类型的节点时会用同一个名字(因为都是同一个'type')
- output指定输出的位置
- args指定一些具体的参数,比如rosbag的play node需要指定文件路径,也可以为node里面的一些topic改名字(应该说是连接到新名字)
-
node 标签里面的子标签 remap,为该node里面订阅(或发布的topic) 重定向
上面文件在做什么?
首先分别在两个组中各自建立了一个turtlesim_node,然后只控制组1的节点,让组2的节点跟着组1的节点一起运动
以组1为例,group标签定义了一个组,组的名字在ns属性中给出 为"turtlesim1",该组内定义了一个node标签,说明组内只有一个节点,该节点是ros包(pkg属性)"turtlesim"里面的(type属性)"turtlesim_node"节点(的一个实例) ,该节点的名字(name属性)为"sim"
定义了两个组之后,又定义了一个mimic(模仿)节点,用于使组2的节点模仿组1的节点运动,通过remap将input(输入)话题重新映射到turtlesim1的turtle1话题,将output(输出)话题映射到turtlesim2,意味着将turtlesim1/turtle1 topic作为mimic节点的input topic,而turtlesim2/turtle1 topic作为mimic节点的output topic
关于remap标签的另一个例子
比如想同时用多张图片跑一套算法,可以为每张img定义一个组:
以组1为例,每个组定义两个节点:
- 一个节点专门发布数据(play rosbag)到某个话题上,另一个节点作为订阅者,订阅该话题来接收输入数据
<node pkg="rosbag" type="play" name="img_1" output="screen" args="--clock path_to_data /topic_a:=/group_1/topic_a /topic_b:=/group_1/topic_b ..... ">
</node>
<node pkg="algorithm_pkg" type="algorithm_node" name="algorithm_1" output="screen">
<remap from="/topic_a" to="/group_1/topic_a" >
</remap>
</node>
节点1:在args属性将原来topic名字映射成包含组名的新名字,意味着rosbag发布的topic名字变成 /group_1/topic_a 等等...
节点2:remap标签,将该节点订阅的话题重定向为新的名字,使其与在该组内发布数据的rosbag play节点所发布的话题名对应
为什么需要把原本的topic改为包含组名的?原本在算法节点中定义的订阅者,订阅的topic名字只是topic_a,由于输入图像不同,如果所有的输入图像都发布到topic_a这一个topic上,会造成混乱,因此应该一个输入图像对应一个话题名,同样地接收该输入图像(即运行算法的节点)所订阅的话题名也要随之更改。
launch文件的更多内容:
在roslaunch文件中使用变量
//TODO

