CNN训练Cifar-10技巧
关于数据集
Cifar-10是由Hinton的两个大弟子Alex Krizhevsky、Ilya Sutskever收集的一个用于普适物体识别的数据集。Cifar是加拿大政府牵头投资的一个先进科学项目研究所。
说白了,就是看你穷的没钱搞研究,就施舍给你。Hinton、Bengio和他的学生在2004年拿到了Cifar投资的少量资金,建立了神经计算和自适应感知项目。
这个项目结集了不少计算机科学家、生物学家、电气工程师、神经科学家、物理学家、心理学家,加速推动了DL的进程。从这个阵容来看,DL已经和ML系的数据挖掘分的很远了。
DL强调的是自适应感知和人工智能,是计算机与神经科学交叉。DM强调的是高速、大数据、统计数学分析,是计算机和数学的交叉。
Cifar-10由60000张32*32的RGB彩色图片构成,共10个分类。50000张训练,10000张测试(交叉验证)。这个数据集最大的特点在于将识别迁移到了普适物体,而且应用于
多分类(姊妹数据集Cifar-100达到100类,ILSVRC比赛则是1000类)。

可以看到,同已经成熟的人脸识别相比,普适物体识别挑战巨大,数据中含有大量特征、噪声,识别物体比例不一。而且分类庞大(SVM直接跪哭)。
因而,Cifar-10相对于传统图像识别数据集,是相当有挑战的。
Alex Krizhevsky在2012年的论文ImageNet Classification with Deep Convolutional Neural Networks 使用了一些改良CNN方法去
解决普适物体识别难题,效果惊人。尤其是开创性地使用了CUDA来加速神经网络训练,并且开放了Cuda-Convnet和绝秘CNN结构,群众反响热烈。
于是就有了今年GTC 2015老黄手捧着TitanX大喊:NVIDIA显卡伴你更好深度学习!在通用计算上,CUDA确实多方面压制OpenCL。
Part I 总览
1.1 Cifar-10的训练走向
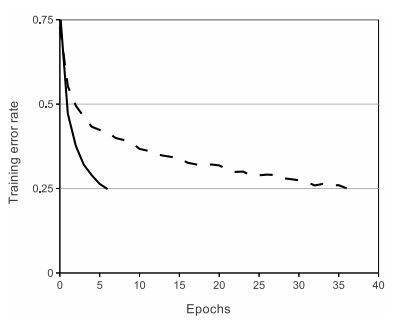
Alex的论文里可能困惑最大的就是这张奇葩的图。使用了ReLu的CNN在batchsize为100的训练中,epoch 5(2500次迭代,显卡好点只要80s)就把验证集错误率降到了25%。
而Tanh则要花上35个epoch。困惑点有两个:①居然下降那么快②我照着传统CNN模型改改,为什么只能降到30%,而且还在50+ epochs。
然后Alex又来了一句,我们的改良CNN已经把Cifar-10的错误率降到了11%。难怪LeCun会说:已解决CIFAR-10,目标 ImageNet(ILSVRC)。
1.2 快速简易结构
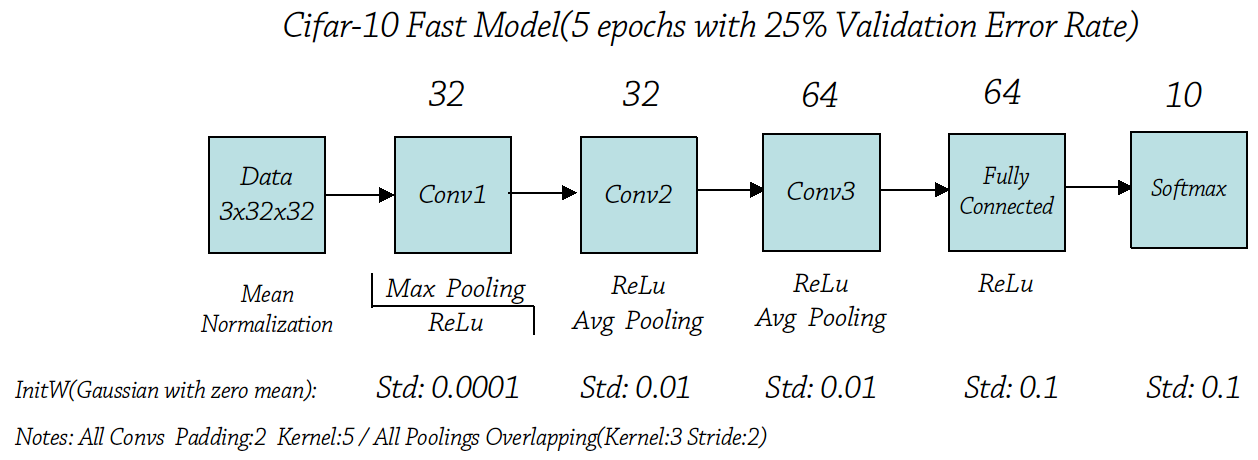
已有的测试推出了一个Cifar-10的CNN深度、广度基本结构,理论上这个网络容量能够支持把验证集错误率降到25%左右。结构如下:
Part II ReLu激活函数、初始化W、学习率、样本均值归一化
2.1 ReLu
Xavier刚在2011年的Deep Sparse Rectifier Neural Networks论文中给出了ReLu在非监督学习网络中的卓越成效。
Alex就在2012年的AlexNet中,把所有Tanh/Logistic全换成了ReLu(卷积+隐层,Softmax要取概率没办法),但是没有介绍细节。(在其源码中可以看到)
正如我的前一篇文章ReLu激活函数提到的,ReLu为网络引入了大量的稀疏性,加速了复杂特征解离。非饱和的宽广映射空间,加速了特征学习。
实际测Model的时候,可以对比一下tanh和ReLu。
2.2 初始化W
如果生搬硬套Tanh/Logistic的初始化W经验规则:
对于Log-Sigmoid: $[-4*\frac{\sqrt{6}}{\sqrt{LayerInput+LayerOut}},4*\frac{\sqrt{6}}{\sqrt{LayerInput+LayerOut}}]$
对于Tanh-Sigmoid: $[\frac{\sqrt{6}}{\sqrt{LayerInput+LayerOut}},\frac{\sqrt{6}}{\sqrt{LayerInput+LayerOut}}]$
那么你会死的很难看。情况①:NaN。情况②:似然2.3000, 验证集错误率90%。情况③:不论怎么训练,验证集在70~80%波动,然后过拟合。
主要问题是:①经验规则适用于[-1,1]的输入,如果直接用,那么会爆网络。②ReLu的非饱和线性端是做回归用的激活函数,输出近似高斯分布。
基于以上两点,Alex选择了高斯分布生成零均值、小标准差的随机值作为初始化W,并且逐层加大标准差,使得W有弹性。(0.0001-0.01-0.01-0.1-0.1)
由于高斯分布的的不均匀性(大值有,超小值也有),使得经过ReLu激活,不会有很无解的爆数值问题.当然输入不要太大,[0,256](原始) or [-128,128](减均值)
2.3 学习率
ReLu的线性不饱和激活端着相对于Tanh的双饱和端(经验规则0.1),肯定要降量级。
Caffe和Alex给的Model基础都是0.001(W)/0.002(b)。
至于为什么Bias的学习率是2倍,个人猜测是更快抑制Wx加权结果,加速学习。
2.4 样本均值归一化(重点)
Alex 和 Caffe中的初始化参数都是基于均值归一化的,如果不做归一化,会因为输入大了一半,导致训练失败。
这也是为什么Caffe强制为样本计算图像均值的原因。
一个简单策略是:训练样本均值归一化。即对训练集所有样本计算各个维度的均值(比如32x32图像,就应该有32x32个均值)
并且将均值存储起来。训练网络时,训练集、验证集减去存起来的均值。测试网络时,测试集减去存起来的均值。(一定要全减去训练集的均值)
这样,像素值[0,255]被调整成了近似[-128,128]。
尽管图像数据格式规整,但是做一做归一化还是挺有用处的。
Part III 重叠降采样、均采样
3.1 重叠
传统的CNN中,Pooling是不重叠的。不重叠忽视了邻近像素的对特征的影响,会造成网络精度下降。(不做重叠Pooling,很难迅速达到25%)
Alex在paper中还提到,重叠Pooling一定程度上减轻了过拟合。
为了对比测试重叠/非重叠模型,我在Caffe中对默认的Fast Model进行了修改。
参数~Kernel Conv1:(3,3)、Conv2:(4,4)、Conv3:(5,5) Pooling大小都是(2,2),在epoch 9开始,lr降一个量级。
| Epoch/Model | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 重叠(默认) | 44% | 37% | 34% | 30% | 30% | 30% | 30% | 30% | 25% | 25% |
| 非重叠(修改) | 52% | 44% | 39% | 37% | 35% | 34% | 33% | 32% | 29% | 29% |
可以看到,重叠结构带来更高的精度和更快的特征学习。
3.2 均采样
值得注意的是,重叠结构在提高精度的同时,可能引入噪声。而Alex则在Conv2、Conv3全使用了Avg Pooling
我猜测可能和Pooling的重叠结构有关,如果对不断重叠的Pooling结果,依旧全使用Max Pooling,那么有更大可能把噪声放大了。
而此时使用Avg Pooling就能把引入的噪声给降噪。于是,我在Caffe中对默认重叠模型,进行了不同组合Pooling的测试。
| Epoch/Pooling | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| Max+Avg+Avg(默认)(最好) | 44% | 37% | 34% | 30% | 30% | 30% | 30% | 30% | 25% | 25% |
| Max+Max+Max | 47% | 42% | 37% | 37% | 34% | 32% | 31% | 31% | 27% | 26% |
| Max+Max+Avg(较好) | 42% | 37% | 33% | 32% | 30% | 30% | 30% | 30% | 26% | 25% |
| Avg+Avg+Avg (略差) | 50% | 43% | 40% | 38% | 36% | 35% | 34% | 34% | 31% | 31% |
| Avg+Max+Avg | 47% | 40% | 37% | 35% | 34% | 34% | 32% | 32% | 31% | 30% |
| Avg+Max+Max(最差) | 47% | 42% | 40% | 38% | 37% | 36% | 36% | 36% | 33% | 33% |
【分析】
可以看到,Alex使用的Max+Avg+Avg无论在精度,还是在速度上,都远超其他组合。
Max+Max+Max在速度和精度上都不如Max+Max+Avg,说明Avg的引入效果还不错。
比较奇葩的下面3个组合,我们首先看到的是Avg+Avg+Avg,在错误率下降速度方面排倒数第一。网络训练速度也是倒一(Avg计算比Max慢)
然后是Avg+Max+Max,在精度方面排倒数第一,而在Conv3用Avg换掉Max就好很多。
【总结】
从Avg Pooling角度来看,这玩意不仅计算量大,而且引入噪声,比Max Pooling不知差到哪里去了。
所以,凡是在Conv1使用Avg Pooling的,都没有好果子吃,精度太差。所以,没有重叠的Conv1更应该考虑使用Max Pooling。
在Conv2、Conv3中,使用Avg反而效果很好了,可能原因是抵消了重叠结构带来的部分噪声。两个Avg效果好于一个Avg,说明Avg也不是那么坏嘛。
3.3 非重叠均采样
然而当我把上述组合用在非重叠结构里时,看起来不太对劲。
| Epoch/Pooling | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| Max+Avg+Avg(较好) | 52% | 44% | 39% | 37% | 35% | 33% | 32% | 32% | 29% | 29% |
| Max+Max+Max(最好) | 50% | 40% | 37% | 35% | 34% | 33% | 33% | 32% | 29% | 29% |
| Avg+Avg+Avg(最差) | 56% | 48% | 45% | 41% | 40% | 38% | 37% | 36% | 33% | 33% |
| Avg+Max+Max(较差) | 53% | 45% | 41% | 39% | 37% | 37% | 37% | 36% | 33% | 33% |
可以看到,此时Max+Max+Max在速度上领先了Max+Avg+Avg,这和重叠结构的情况相反。
Avg+Avg+Avg依旧最差,Avg+Max+Max也不好过,因为它在Conv1用了Avg。
对比了两个结构,不难发现,Avg在重叠结构里面作用巨大,而在非重叠结构里面,如果用Avg,则会影响网络训练。
除此之外,不难发现,非重叠结构的精度明显不如重叠结构,这也是为什么Alex论文贴的那张图比较奇葩了。
Cifar-10想要快速达到25%错误率,传统LeNet修改版结构是很难满足要求的。
3.3 长时间完全训练
来自Caffe中的full_train,跑完vaild error大概可以优化到 19%。
这个数字的贡献有二:
①重叠结构:
非重叠结构在epoch 10左右达到临界29%,之后再训练,会衰退到32%~35%
而重叠结构加Max Pooling,最后能维持在28%左右,最后降低学习率,大概能提升到25%
②Avg Pooling
重叠结构+Avg Pooling的突破点在epoch 20~30,这时候,与Max Pooling不同的是,error,突的一下,
从28%掉到23%。然后在epcoh 40, lr降一个量级后,从23%飙到19%。
可以看到Avg Pooling和重叠结构带来的精度提升,在训练后期,真是厚积薄发。
3.4 基本没有用的LRN层
尽管Caffe中默认是加上去的,但是根据作者在知乎的说法,只是为了尊重前人的成果。
examples只是简单的复现了Alex的结构。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号