[置顶]
【H2O系列】关于H2O和OmniH2O代码安装及代码解读摘要`
摘要:  0. 前言 这篇博客主要用于过程记录H2O代码部分的参数解读部分。 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! [NOTE]:这篇博客笔者也有疏忽的地方,仅供参考!!!! 1. 论文&项目 项目地址:https://omni.
0. 前言 这篇博客主要用于过程记录H2O代码部分的参数解读部分。 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! [NOTE]:这篇博客笔者也有疏忽的地方,仅供参考!!!! 1. 论文&项目 项目地址:https://omni.
0. 前言 这篇博客主要用于过程记录H2O代码部分的参数解读部分。 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! [NOTE]:这篇博客笔者也有疏忽的地方,仅供参考!!!! 1. 论文&项目 项目地址:https://omni.
[置顶]
【H2O系列】包括人形机器人WBC相关论文小结
摘要:  1. 前言 这篇博客主要用于简要记录包括人形机器人WBC或locomotion相关论文小结。 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! PS:主要是备忘,不然看过就忘了。。。(汗 2. 正文 先看数据集或者说动捕数据: 2.
1. 前言 这篇博客主要用于简要记录包括人形机器人WBC或locomotion相关论文小结。 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! PS:主要是备忘,不然看过就忘了。。。(汗 2. 正文 先看数据集或者说动捕数据: 2.
1. 前言 这篇博客主要用于简要记录包括人形机器人WBC或locomotion相关论文小结。 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! PS:主要是备忘,不然看过就忘了。。。(汗 2. 正文 先看数据集或者说动捕数据: 2.
[置顶]
legged-robot关于locomotion、Navigation任务主要文章速览
摘要: 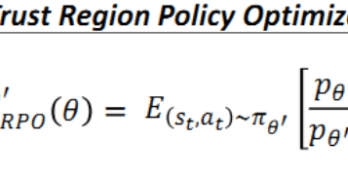 0. 前言 目前legged robot包括locomotion(怎么走)、navigation(往哪走)、人形机器人的whole body control以及基于机械臂的manipulation的任务。 本文章特此记录 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,
0. 前言 目前legged robot包括locomotion(怎么走)、navigation(往哪走)、人形机器人的whole body control以及基于机械臂的manipulation的任务。 本文章特此记录 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,
0. 前言 目前legged robot包括locomotion(怎么走)、navigation(往哪走)、人形机器人的whole body control以及基于机械臂的manipulation的任务。 本文章特此记录 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,
[置顶]
关于Jetson nano (B02)如何部署Yolov8以及一些必要的知识点
摘要:  一、前言 记录一个简单的安装和部署过程,尽管笔者也是按照教程来的,但奈何参考了很多教程,虽然写的都非常好,但是却很散,因此笔者这里想把这些教程的精华提炼出来,汇总并且写在正文处。还是老规矩,笔者也在学习,如有错误,请在评论区及时指出!感谢!也欢迎评论区一起讨论! 二、正文 0.bashrc 不知道大
一、前言 记录一个简单的安装和部署过程,尽管笔者也是按照教程来的,但奈何参考了很多教程,虽然写的都非常好,但是却很散,因此笔者这里想把这些教程的精华提炼出来,汇总并且写在正文处。还是老规矩,笔者也在学习,如有错误,请在评论区及时指出!感谢!也欢迎评论区一起讨论! 二、正文 0.bashrc 不知道大
一、前言 记录一个简单的安装和部署过程,尽管笔者也是按照教程来的,但奈何参考了很多教程,虽然写的都非常好,但是却很散,因此笔者这里想把这些教程的精华提炼出来,汇总并且写在正文处。还是老规矩,笔者也在学习,如有错误,请在评论区及时指出!感谢!也欢迎评论区一起讨论! 二、正文 0.bashrc 不知道大
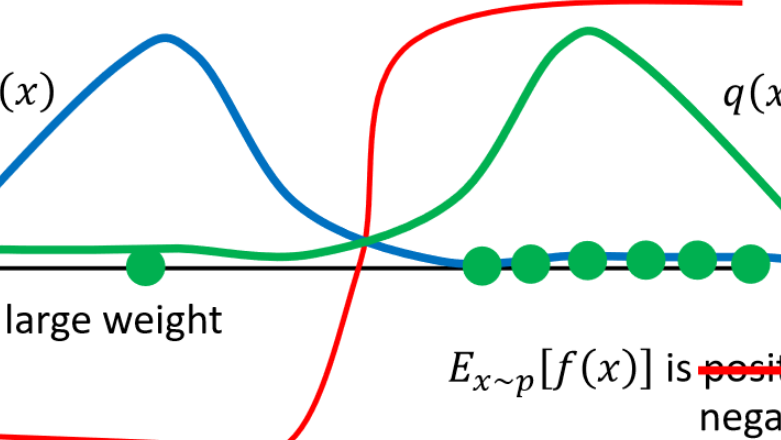 这个题图就涵盖了PPO主要的改进之处
这个题图就涵盖了PPO主要的改进之处
[置顶]
【论文系列】Diffuision Policy + RL知识点梳理 -------个人博客_ZSY_20241101
摘要: 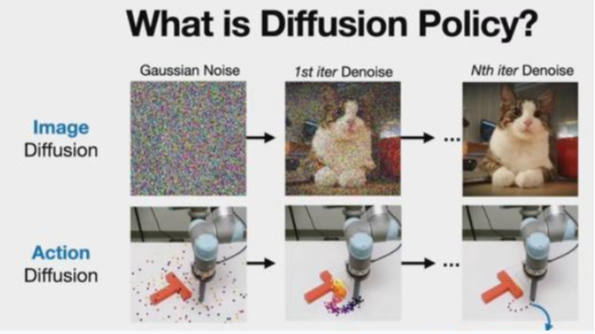 Diffusion Policy: Visuomotor Policy Learning via Action Diffusion Cheng Chi, Zhenjia Xu, Siyuan Feng, Eric Cousineau, Yilun Du, Benjamin Burchfiel, Ru
Diffusion Policy: Visuomotor Policy Learning via Action Diffusion Cheng Chi, Zhenjia Xu, Siyuan Feng, Eric Cousineau, Yilun Du, Benjamin Burchfiel, Ru
Diffusion Policy: Visuomotor Policy Learning via Action Diffusion Cheng Chi, Zhenjia Xu, Siyuan Feng, Eric Cousineau, Yilun Du, Benjamin Burchfiel, Ru
【Legged gym】关于Legged gym用到的roll_out_storages的batch的解析和一些PPO算法层面.config文件里参数的说明
摘要:
1. 前言 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! 2. 正文 2.1 yield 最开始发现于:rollout_storage.py文件下的mini_batch_generator函数: 感觉这个最外层的num_epoc
一句话胜千言系列:BatchNorm和LayerNorm
摘要:
1. 前言 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! 2. 正文 区别就一句话: BatchNorm是对一个batch-size样本内的每个特征[分别]做归一化,LayerNorm是[分别]对每个样本的所有特征做归一化。 3
【Issac gym】关于如何在play.py里写控制命令command控制机器人运动的一点心得和教程
摘要:
1.前言 比如你在Issac里训练了一个机器人行走,但是command确实已经定下来的, 我想用键盘操作要怎样??或者手柄呢?给个指令让机器人去追?? 下面我来教大家 2.正文 2.1 pygame 开多线程即可,把命令赋给play.py里面的command 我看智元机器人X1的配置文件play.p
【HumanoidGym】关于Humanoid Gym或者Legged_gym如何存储.pt 存储模型文件及大小
摘要:
1 前言 我很好奇,训练出来的模型到底是个啥? 今天直接来一探究竟。 2 正文 2.1 其实存的是网络的参数、偏置bias等: 每隔一段时间存储一次: 这是存储的信息: 好了,问题解决了。 2.2 A-C网络(非对称网络)网络结构: 然后我把网络的参数量打印出来了: 我们来计算下 Actor总参数:
【H2O】-->【HybrIK】关于RGB2SMPL算法工程HybrIK的安装记录
摘要:
1. 前言 主要记录关于RGB2SMPL算法工程HybrIK的安装记录。 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! 2. 正文 2.0 torch_tricks model.train()的作用是启用 Batch Norma
【Git】关于windows上Git的配置
摘要:
1. 前言 这篇博客主要用于记录git。 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! 2. 正文 关于安装部分: https://blog.csdn.net/lijianyi0219/article/details/11629
【humanoid gym】关于在Issac gym里面PPO算法实现里transitions部分roll out storage的记录
摘要:
1. 前言 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! 2. 正文 2.1 在on_policy_runner.py文件夹下,初始化的地方: 然后我们寻找定义的地方,在ppo.py文件夹下: 其中参数num_transitio
【Urdf-Viz】好用的urdf visual工具!
摘要:
1. 前言 这篇博客主要用于记录如何安装urdf-viz。这个工具主要用于URDF文件的显示,比直接看URDF文件更加直接便捷! 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! 2. 正文 2.1 基础环境安装 可以通过以下命令快
【Git】Git工具简要说明及Pull push方法
摘要:
1. 前言 这篇博客主要用于记录Git工具简要说明及Pull push方法。 一方面便于日后自己的温故学习,另一方面也便于大家的学习和交流。 如有不对之处,欢迎评论区指出错误,你我共同进步学习! 2. 正文 先说为什么这么做,因为一个项目如果工程量很大的话就需要很多人来维护,你总不肯能拿个U盘到处铐