

UVM_RAL 理解
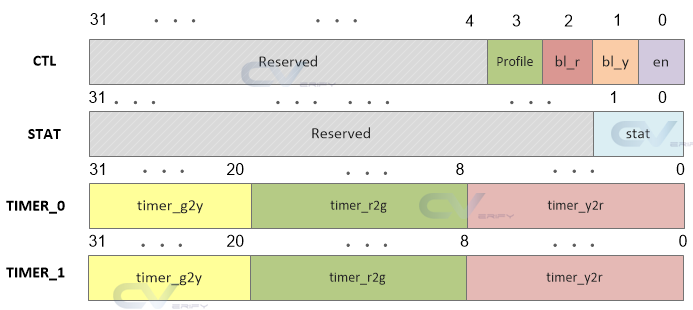
1. 寄存器信息描述
2. module 定义
module traffic ( input pclk, input presetn, input [31:0] paddr, input [31:0] pwdata, input psel, input pwrite, input penable, // Outputs output [31:0] prdata); reg [3:0] ctl_reg; // profile, blink_red, blink_yellow, mod_en RW reg [1:0] stat_reg; // state[1:0] reg [31:0] timer_0; // timer_g2y[31:20], timer_r2g[19:8], timer_y2r[7:0] RW reg [31:0] timer_1; // timer_g2y[31:20], timer_r2g[19:8], timer_y2r[7:0] RW reg [31:0] data_in; reg [31:0] rdata_tmp; // Set all registers to default values always @ (posedge pclk) begin if (!presetn) begin data_in <= 0; ctl_reg <= 0; stat_reg <= 0; timer_0 <= 32'hcafe_1234; timer_1 <= 32'hface_5678; end end // Capture write data always @ (posedge pclk) begin if (presetn & psel & penable) if (pwrite) case (paddr) 'h0 : ctl_reg <= pwdata; 'h4 : timer_0 <= pwdata; 'h8 : timer_1 <= pwdata; 'hc : stat_reg <= pwdata; endcase end // Provide read data always @ (penable) begin if (psel & !pwrite) case (paddr) 'h0 : rdata_tmp <= ctl_reg; 'h4 : rdata_tmp <= timer_0; 'h8 : rdata_tmp <= timer_1; 'hc : rdata_tmp <= stat_reg; endcase end assign prdata = (psel & penable & !pwrite) ? rdata_tmp : 'hz; endmodule
3. register model
// Register definition for the register called "ctl" class ral_cfg_ctl extends uvm_reg; rand uvm_reg_field mod_en; // Enables the module rand uvm_reg_field bl_yellow; // Blinks yellow rand uvm_reg_field bl_red; // Blinks red rand uvm_reg_field profile; // 1 : Peak, 0 : Off-Peak `uvm_object_utils(ral_cfg_ctl) function new(string name = "traffic_cfg_ctrl"); super.new(name, 32, build_coverage(UVM_NO_COVERAGE)); endfunction: new // Build all register field objects virtual function void build(); this.mod_en = uvm_reg_field::type_id::create("mod_en",, get_full_name()); this.bl_yellow = uvm_reg_field::type_id::create("bl_yellow",,get_full_name()); this.bl_red = uvm_reg_field::type_id::create("bl_red",, get_full_name()); this.profile = uvm_reg_field::type_id::create("profile",, get_full_name()); // configure(parent, size, lsb_pos, access, volatile, reset, has_reset, is_rand, individually_accessible); this.mod_en.configure(this, 1, 0, "RW", 0, 1'h0, 1, 0, 0); this.bl_yellow.configure(this, 1, 1, "RW", 0, 1'h0, 1, 0, 0); this.bl_red.configure(this, 1, 2, "RW", 0, 1'h0, 1, 0, 0); this.profile.configure(this, 1, 3, "RW", 0, 1'h0, 1, 0, 0); endfunction endclass // Register definition for the register called "stat" class ral_cfg_stat extends uvm_reg; uvm_reg_field state; // Current state of the design `uvm_object_utils(ral_cfg_stat) function new(string name = "ral_cfg_stat"); super.new(name, 32, build_coverage(UVM_NO_COVERAGE)); endfunction virtual function void build(); this.state = uvm_reg_field::type_id::create("state",, get_full_name()); // configure(parent, size, lsb_pos, access, volatile, reset, has_reset, is_rand, individually_accessible); this.state.configure(this, 2, 0, "RO", 0, 1'h0, 0, 0, 0); endfunction endclass // Register definition for the register called "timer" class ral_cfg_timer extends uvm_reg; uvm_reg_field timer; // Time for which it blinks `uvm_object_utils(ral_cfg_timer) function new(string name = "traffic_cfg_timer"); super.new(name, 32,build_coverage(UVM_NO_COVERAGE)); endfunction virtual function void build(); this.timer = uvm_reg_field::type_id::create("timer",,get_full_name()); // configure(parent, size, lsb_pos, access, volatile, reset, has_reset, is_rand, individually_accessible); this.timer.configure(this, 32, 0, "RW", 0, 32'hCAFE1234, 1, 0, 1); this.timer.set_reset('h0, "SOFT"); endfunction endclass // These registers are grouped together to form a register block called "cfg" class ral_block_traffic_cfg extends uvm_reg_block; rand ral_cfg_ctl ctrl; // RW rand ral_cfg_timer timer[2]; // RW ral_cfg_stat stat; // RO `uvm_object_utils(ral_block_traffic_cfg) function new(string name = "traffic_cfg"); super.new(name, build_coverage(UVM_NO_COVERAGE)); endfunction virtual function void build(); this.default_map = create_map("", 0, 4, UVM_LITTLE_ENDIAN, 0); this.ctrl = ral_cfg_ctl::type_id::create("ctrl",,get_full_name()); this.ctrl.configure(this, null, ""); this.ctrl.build(); this.default_map.add_reg(this.ctrl, `UVM_REG_ADDR_WIDTH'h0, "RW", 0); this.timer[0] = ral_cfg_timer::type_id::create("timer[0]",,get_full_name()); this.timer[0].configure(this, null, ""); this.timer[0].build(); this.default_map.add_reg(this.timer[0], `UVM_REG_ADDR_WIDTH'h4, "RW", 0); this.timer[1] = ral_cfg_timer::type_id::create("timer[1]",,get_full_name()); this.timer[1].configure(this, null, ""); this.timer[1].build(); this.default_map.add_reg(this.timer[1], `UVM_REG_ADDR_WIDTH'h8, "RW", 0); this.stat = ral_cfg_stat::type_id::create("stat",,get_full_name()); this.stat.configure(this, null, ""); this.stat.build(); this.default_map.add_reg(this.stat, `UVM_REG_ADDR_WIDTH'hc, "RO", 0); endfunction endclass // The register block is placed in the top level model class definition class ral_sys_traffic extends uvm_reg_block; rand ral_block_traffic_cfg cfg; `uvm_object_utils(ral_sys_traffic) function new(string name = "traffic"); super.new(name); endfunction function void build(); this.default_map = create_map("", 0, 4, UVM_LITTLE_ENDIAN, 0); this.cfg = ral_block_traffic_cfg::type_id::create("cfg",,get_full_name()); this.cfg.configure(this, "tb_top.pB0"); this.cfg.build(); this.default_map.add_submap(this.cfg.default_map, `UVM_REG_ADDR_WIDTH'h0); endfunction endclass
4. register env
class reg2apb_adapter extends uvm_reg_adapter; `uvm_object_utils (reg2apb_adapter) function new (string name = "reg2apb_adapter"); super.new (name); endfunction virtual function uvm_sequence_item reg2bus (const ref uvm_reg_bus_op rw); bus_pkt pkt = bus_pkt::type_id::create ("pkt"); pkt.write = (rw.kind == UVM_WRITE) ? 1: 0; pkt.addr = rw.addr; pkt.data = rw.data; `uvm_info ("adapter", $sformatf ("reg2bus addr=0x%0h data=0x%0h kind=%s", pkt.addr, pkt.data, rw.kind.name), UVM_DEBUG) return pkt; endfunction virtual function void bus2reg (uvm_sequence_item bus_item, ref uvm_reg_bus_op rw); bus_pkt pkt; if (! $cast (pkt, bus_item)) begin `uvm_fatal ("reg2apb_adapter", "Failed to cast bus_item to pkt") end rw.kind = pkt.write ? UVM_WRITE : UVM_READ; rw.addr = pkt.addr; rw.data = pkt.data; `uvm_info ("adapter", $sformatf("bus2reg : addr=0x%0h data=0x%0h kind=%s status=%s", rw.addr, rw.data, rw.kind.name(), rw.status.name()), UVM_DEBUG) endfunction endclass // Register environment class puts together the model, adapter and the predictor class reg_env extends uvm_env; `uvm_component_utils (reg_env) function new (string name="reg_env", uvm_component parent); super.new (name, parent); endfunction ral_sys_traffic m_ral_model; // Register Model reg2apb_adapter m_reg2apb; // Convert Reg Tx <-> Bus-type packets uvm_reg_predictor #(bus_pkt) m_apb2reg_predictor; // Map APB tx to register in model my_agent m_agent; // Agent to drive/monitor transactions virtual function void build_phase (uvm_phase phase); super.build_phase (phase); m_ral_model = ral_sys_traffic::type_id::create ("m_ral_model", this); m_reg2apb = reg2apb_adapter :: type_id :: create ("m_reg2apb"); m_apb2reg_predictor = uvm_reg_predictor #(bus_pkt) :: type_id :: create ("m_apb2reg_predictor", this); m_ral_model.build (); m_ral_model.lock_model (); uvm_config_db #(ral_sys_traffic)::set (null, "uvm_test_top", "m_ral_model", m_ral_model); endfunction virtual function void connect_phase (uvm_phase phase); super.connect_phase (phase); m_apb2reg_predictor.map = m_ral_model.default_map; m_apb2reg_predictor.adapter = m_reg2apb; endfunction endclass
// Declare a sequence_item for the APB transaction class bus_pkt extends uvm_sequence_item; rand bit [31:0] addr; rand bit [31:0] data; rand bit write; `uvm_object_utils_begin (bus_pkt) `uvm_field_int (addr, UVM_ALL_ON) `uvm_field_int (data, UVM_ALL_ON) `uvm_field_int (write, UVM_ALL_ON) `uvm_object_utils_end function new (string name = "bus_pkt"); super.new (name); endfunction constraint c_addr { addr inside {0, 4, 8};} endclass // Drives a given apb transaction packet to the APB interface class my_driver extends uvm_driver #(bus_pkt); `uvm_component_utils (my_driver) bus_pkt pkt; virtual bus_if vif; function new (string name = "my_driver", uvm_component parent); super.new (name, parent); endfunction virtual function void build_phase (uvm_phase phase); super.build_phase (phase); if (! uvm_config_db#(virtual bus_if)::get (this, "*", "bus_if", vif)) `uvm_error ("DRVR", "Did not get bus if handle") endfunction virtual task run_phase (uvm_phase phase); bit [31:0] data; vif.psel <= 0; vif.penable <= 0; vif.pwrite <= 0; vif.paddr <= 0; vif.pwdata <= 0; forever begin seq_item_port.get_next_item (pkt); if (pkt.write) write (pkt.addr, pkt.data); else begin read (pkt.addr, data); pkt.data = data; end seq_item_port.item_done (); end endtask virtual task read ( input bit [31:0] addr, output logic [31:0] data); vif.paddr <= addr; vif.pwrite <= 0; vif.psel <= 1; @(posedge vif.pclk); vif.penable <= 1; @(posedge vif.pclk); data = vif.prdata; vif.psel <= 0; vif.penable <= 0; endtask virtual task write ( input bit [31:0] addr, input bit [31:0] data); vif.paddr <= addr; vif.pwdata <= data; vif.pwrite <= 1; vif.psel <= 1; @(posedge vif.pclk); vif.penable <= 1; @(posedge vif.pclk); vif.psel <= 0; vif.penable <= 0; endtask endclass // Monitors the APB interface for any activity and reports out // through an analysis port class my_monitor extends uvm_monitor; `uvm_component_utils (my_monitor) function new (string name="my_monitor", uvm_component parent); super.new (name, parent); endfunction uvm_analysis_port #(bus_pkt) mon_ap; virtual bus_if vif; virtual function void build_phase (uvm_phase phase); super.build_phase (phase); mon_ap = new ("mon_ap", this); uvm_config_db #(virtual bus_if)::get (null, "uvm_test_top.*", "bus_if", vif); endfunction virtual task run_phase (uvm_phase phase); fork forever begin @(posedge vif.pclk); if (vif.psel & vif.penable & vif.presetn) begin bus_pkt pkt = bus_pkt::type_id::create ("pkt"); pkt.addr = vif.paddr; if (vif.pwrite) pkt.data = vif.pwdata; else pkt.data = vif.prdata; pkt.write = vif.pwrite; mon_ap.write (pkt); end end join_none endtask endclass // The agent puts together the driver, sequencer and monitor class my_agent extends uvm_agent; `uvm_component_utils (my_agent) function new (string name="my_agent", uvm_component parent); super.new (name, parent); endfunction my_driver m_drvr; my_monitor m_mon; uvm_sequencer #(bus_pkt) m_seqr; virtual function void build_phase (uvm_phase phase); super.build_phase (phase); m_drvr = my_driver::type_id::create ("m_drvr", this); m_seqr = uvm_sequencer#(bus_pkt)::type_id::create ("m_seqr", this); m_mon = my_monitor::type_id::create ("m_mon", this); endfunction virtual function void connect_phase (uvm_phase phase); super.connect_phase (phase); m_drvr.seq_item_port.connect (m_seqr.seq_item_export); endfunction endclass
5. testbench env
class my_env extends uvm_env; `uvm_component_utils (my_env) my_agent m_agent; reg_env m_reg_env; function new (string name = "my_env", uvm_component parent); super.new (name, parent); endfunction virtual function void build_phase (uvm_phase phase); super.build_phase (phase); m_agent = my_agent::type_id::create ("m_agent", this); m_reg_env = reg_env::type_id::create ("m_reg_env", this); uvm_reg::include_coverage ("*", UVM_CVR_ALL); endfunction // Connect analysis port of monitor with predictor, assign agent to register env // and set default map of the register env virtual function void connect_phase (uvm_phase phase); super.connect_phase (phase); m_reg_env.m_agent = m_agent; m_agent.m_mon.mon_ap.connect (m_reg_env.m_apb2reg_predictor.bus_in); m_reg_env.m_ral_model.default_map.set_sequencer(m_agent.m_seqr, m_reg_env.m_reg2apb); endfunction endclass
6. sequence
class reset_seq extends uvm_sequence; `uvm_object_utils (reset_seq) function new (string name = "reset_seq"); super.new (name); endfunction virtual bus_if vif; task body (); if (!uvm_config_db #(virtual bus_if) :: get (null, "uvm_test_top.*", "bus_if", vif)) `uvm_fatal ("VIF", "No vif") `uvm_info ("RESET", "Running reset ...", UVM_MEDIUM); vif.presetn <= 0; @(posedge vif.pclk) vif.presetn <= 1; @ (posedge vif.pclk); endtask endclass
7.test
class base_test extends uvm_test; `uvm_component_utils (base_test) my_env m_env; reset_seq m_reset_seq; uvm_status_e status; function new (string name = "base_test", uvm_component parent); super.new (name, parent); endfunction // Build the testbench environment, and reset sequence virtual function void build_phase (uvm_phase phase); super.build_phase (phase); m_env = my_env::type_id::create ("m_env", this); m_reset_seq = reset_seq::type_id::create ("m_reset_seq", this); endfunction // In the reset phase, apply reset virtual task reset_phase (uvm_phase phase); super.reset_phase (phase); phase.raise_objection (this); m_reset_seq.start (m_env.m_agent.m_seqr); phase.drop_objection (this); endtask endclass class reg_rw_test extends base_test; `uvm_component_utils (reg_rw_test) function new (string name="reg_rw_test", uvm_component parent); super.new (name, parent); endfunction // Note that main_phase comes after reset_phase, and is performed when // DUT is out of reset. "reset_phase" is already defined in base_test // and is always called when this test is started virtual task main_phase(uvm_phase phase); ral_sys_traffic m_ral_model; uvm_status_e status; int rdata; phase.raise_objection(this); m_env.m_reg_env.set_report_verbosity_level (UVM_HIGH); // Get register model from config_db uvm_config_db#(ral_sys_traffic)::get(null, "uvm_test_top", "m_ral_model", m_ral_model); // Write 0xcafe_feed to the timer[1] register, and read it back m_ral_model.cfg.timer[1].write (status, 32'hcafe_feed); m_ral_model.cfg.timer[1].read (status, rdata); // Set 0xface as the desired value for timer[1] register m_ral_model.cfg.timer[1].set(32'hface); `uvm_info(get_type_name(), $sformatf("desired=0x%0h mirrored=0x%0h", m_ral_model.cfg.timer[1].get(), m_ral_model.cfg.timer[1].get_mirrored_value()), UVM_MEDIUM) // Predict that current value of timer[1] is 0xcafe_feed and check it is true m_ral_model.cfg.timer[1].predict(32'hcafe_feed); m_ral_model.cfg.timer[1].mirror(status, UVM_CHECK); // Set desired value of the field "bl_yellow" in register ctrl to 1 // Then start bus transactions by calling "update" to update DUT with // desired value m_ral_model.cfg.ctrl.bl_yellow.set(1); m_ral_model.cfg.update(status); // Attempt to write into a RO register "stat" with some value m_ral_model.cfg.stat.write(status, 32'h12345678); phase.drop_objection(this); endtask // Before end of simulation, allow some time for unfinished transactions to // be over virtual task shutdown_phase(uvm_phase phase); super.shutdown_phase(phase); phase.raise_objection(this); #100ns; phase.drop_objection(this); endtask endclass
8. define backdoor hdl path
// Assume that ral_cfg_ctl and other "uvm_reg" classes are already // defined as in the frontdoor example class ral_block_traffic_cfg extends uvm_reg_block; rand ral_cfg_ctl ctrl; // RW rand ral_cfg_timer timer[2]; // RW ral_cfg_stat stat; // RO `uvm_object_utils(ral_block_traffic_cfg) function new(string name = "traffic_cfg"); super.new(name, build_coverage(UVM_NO_COVERAGE)); endfunction virtual function void build(); default_map = create_map("", 0, 4, UVM_LITTLE_ENDIAN, 0); ctrl = ral_cfg_ctl::type_id::create("ctrl",,get_full_name()); ctrl.configure(this, null, ""); ctrl.build(); // HDL path to this instance is "tb.DUT.ctl_reg" ctrl.add_hdl_path_slice("ctl_reg", 0, ctrl.get_n_bits()); default_map.add_reg(this.ctrl, `UVM_REG_ADDR_WIDTH'h0, "RW", 0); timer[0] = ral_cfg_timer::type_id::create("timer[0]",,get_full_name()); timer[0].configure(this, null, ""); timer[0].build(); // HDL path to this instance is "tb.DUT.timer_0" timer[0].add_hdl_path_slice("timer_0", 0, timer[0].get_n_bits()); default_map.add_reg(this.timer[0], `UVM_REG_ADDR_WIDTH'h4, "RW", 0); timer[1] = ral_cfg_timer::type_id::create("timer[1]",,get_full_name()); timer[1].configure(this, null, ""); timer[1].build(); // HDL path to this instance is "tb.DUT.timer_1" timer[1].add_hdl_path_slice("timer_1", 0, timer[1].get_n_bits()); default_map.add_reg(this.timer[1], `UVM_REG_ADDR_WIDTH'h8, "RW", 0); stat = ral_cfg_stat::type_id::create("stat",,get_full_name()); stat.configure(this, null, ""); stat.build(); // HDL path from DUT to the status register will now be // "tb.DUT.stat_reg" after the previous hierarchies are used // for path concatenation stat.add_hdl_path_slice("stat_reg", 0, stat.get_n_bits()); default_map.add_reg(this.stat, `UVM_REG_ADDR_WIDTH'hc, "RO", 0); add_hdl_path("DUT"); endfunction endclass class ral_sys_traffic extends uvm_reg_block; rand ral_block_traffic_cfg cfg; `uvm_object_utils(ral_sys_traffic) function new(string name = "traffic"); super.new(name); endfunction function void build(); default_map = create_map("", 0, 4, UVM_LITTLE_ENDIAN, 0); cfg = ral_block_traffic_cfg::type_id::create("cfg",,get_full_name()); // Since registers exist at the DUT level in our design, configure // "cfg" class to have an HDL path called "DUT". So complete path to // DUT is now "tb.DUT" cfg.configure(this, "DUT"); cfg.build(); // Path to this top level regblock in our testbench environment is "tb" add_hdl_path("tb"); default_map.add_submap(this.cfg.default_map, `UVM_REG_ADDR_WIDTH'h0); endfunction endclass
9. backdoor access
class reg_backdoor_test extends base_test; `uvm_component_utils (reg_backdoor_test) function new (string name="reg_backdoor_test", uvm_component parent); super.new (name, parent); endfunction virtual task main_phase(uvm_phase phase); ral_sys_traffic m_ral_model; uvm_status_e status; int rdata; phase.raise_objection(this); m_env.m_reg_env.set_report_verbosity_level (UVM_HIGH); uvm_config_db#(ral_sys_traffic)::get(null, "uvm_test_top", "m_ral_model", m_ral_model); // Perform a normal frontdoor access -> write some data first and then read it back m_ral_model.cfg.timer[1].write(status, 32'h1234_5678); m_ral_model.cfg.timer[1].read(status, rdata); `uvm_info(get_type_name(), $sformatf("desired=0x%0h mirrored=0x%0h", m_ral_model.cfg.timer[1].get(), m_ral_model.cfg.timer[1].get_mirrored_value()), UVM_MEDIUM) // Perform a backdoor access for write and then do a frontdoor read m_ral_model.cfg.timer[1].write(status, 32'ha5a5_a5a5, UVM_BACKDOOR); m_ral_model.cfg.timer[1].read(status, rdata); `uvm_info(get_type_name(), $sformatf("desired=0x%0h mirrored=0x%0h", m_ral_model.cfg.timer[1].get(), m_ral_model.cfg.timer[1].get_mirrored_value()), UVM_MEDIUM) // Perform a frontdoor write and then do a backdoor read m_ral_model.cfg.timer[1].write(status, 32'hface_face); // Wait for a time unit so that backdoor access reads update value #1; m_ral_model.cfg.timer[1].read(status, rdata, UVM_BACKDOOR); `uvm_info(get_type_name(), $sformatf("desired=0x%0h mirrored=0x%0h", m_ral_model.cfg.timer[1].get(), m_ral_model.cfg.timer[1].get_mirrored_value()), UVM_MEDIUM) phase.drop_objection(this); endtask virtual task shutdown_phase(uvm_phase phase); super.shutdown_phase(phase); phase.raise_objection(this); #100ns; phase.drop_objection(this); endtask endclass
10. reg_model 寄存器过域问题处理

本文来自博客园,作者:hematologist,转载请注明原文链接:https://www.cnblogs.com/littleMa/p/10903272.html
posted on 2019-05-21 23:39 hematologist 阅读(1204) 评论(0) 编辑 收藏 举报

