

三部分:表头/launch path /capture path
1.表头
1)
-
工具版本信息:如示例中的18.10-p001,对某个具体项目timing signoff 工具的版本最好保证一致;
-
操作系统信息:这一项无关紧要。
-
生产日期:这一项还是有看一下的必要,避免低级错误,哼哧哼哧debug 了半天,结果report 看错了的事情是时有发生的。
-
设计:确定是你的设计。
-
命令:确定report 的时候都加了哪些option, 因为极有可能原始脚本不是你自己写的。
2)
-
Timing path 的起点和驱动时钟及时钟的有效沿:示例中分别为my_start_point, clk, 上升沿。
-
Timing path 的终点和驱动时钟及时钟的有效沿:示例中分别为my_end_point, clk, 上升沿。
-
Timing path 所在的path group:示例中为clk, 大多数工具默认会为每一个clock 定义一个path group,用户可以根据需求自定义path group, 如无用户自定义的path group 某条path 会被归为该path endpoint 驱动时钟对应的group.
-
Analysis View:STA 中一个view = 一组具有相同PVT 的std/macro cell + 一个RC corner, 要确定当前View 是否正确。
-
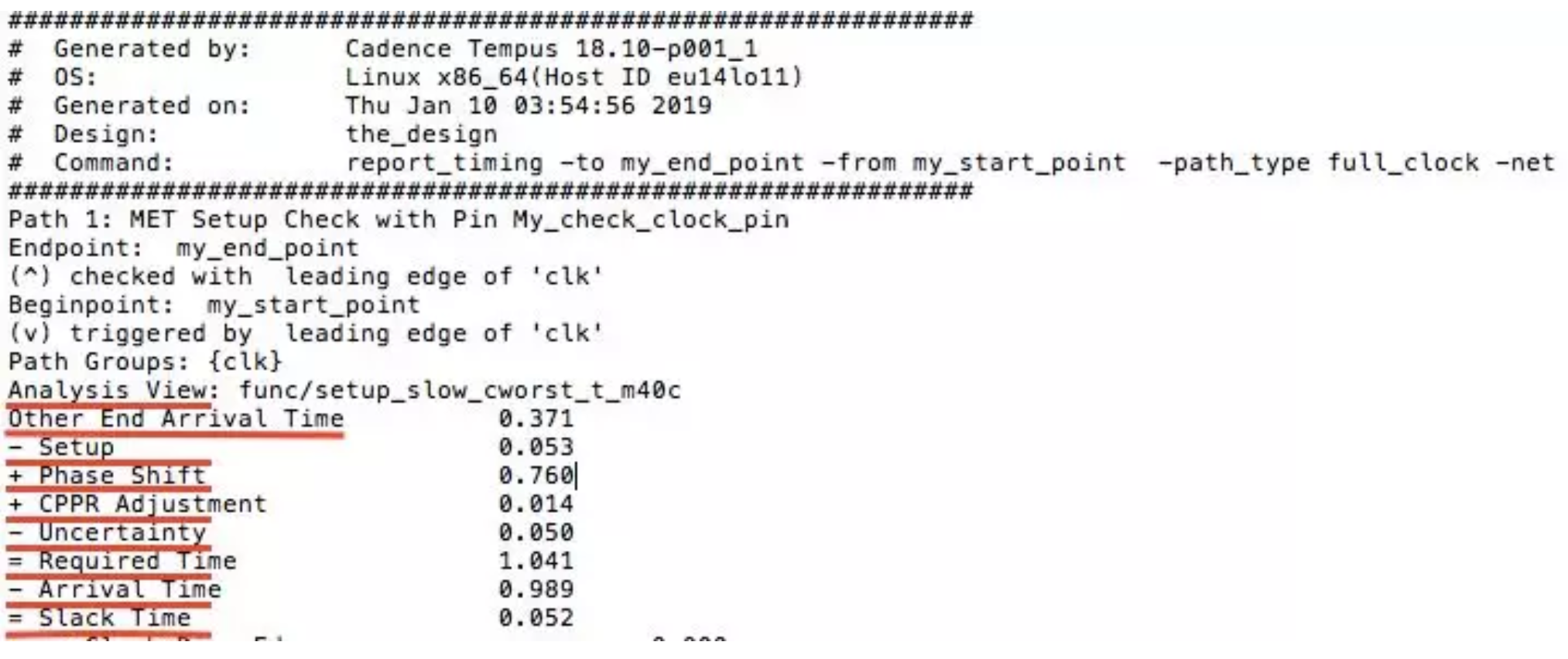
Other end arrival time: capture path 的delay。
- Setup: 从capture 寄存器对应的std cell lib 中查表得到。
- Phase shift: 如果没有MCP ( multi cycle path ) 设置, 该值即为单个clock 的周期。
- CPPR: 在考虑OCV 的STA 分析中,会分别对launch clock path 跟capture clock path 设不同的derate 值,如setup check: launch clock path 会设一个late 的derate, capture clock path 会设一个early 的derate. 而对于同一段path 在实际中不可能会有不同方向的variation 所以为了剔除悲观度,工具会将common path 上的这部分影响减除即CPPR; 对于0 沿check ( 如hold check) 除了Variation, CPPR 还会减除common path 上SI 的影响。这也是为什么common path 越长越好的原因。
- Uncertainty: 该值来自SDC, 通常signoff uncertainty = foundry requirest margin + PLL jitter + IR-drop modeling.
- Required time: 在此时间内到达时序即能满足 = clock period + capture clock path delay + CPPR - Setup - Uncertainty.
- Arrival time: launch data 实际到达时间 = launch clock path delay + data path delay.
- slack: 最终检验值,为正该path pass 为负该path 违规 = required time - arrival time.
2.
check RC 的反标:在Tempus 的report 中有一列 "Arc annotation" 会标明每一条net RC 的来历,如果RC 来自SPEF, 则值为SPEF. 如果有net 没有正确反标,首先要找出未反标的原因。如果所有net 都已正确反标,再进行下一步

check clock skew: 可分别从launch clock path 跟cpature clock path 中得到到start point clock pin 的clock network delay 和到endpoint clock pin 的clock network delay, 如果skew 过大需要找后端确认是有意为之还是给了一版垃圾数据,至于『大』的定义每家公司每个项目都有自己衡量的标准,有的人认为12已经算大了,但有的人认为18才是真的大,所以请根据自己的需求定义大。如果clock skew 也正常
check derate: std cell 是否有用AOCV, 如果有check derate 的值是否合理,Depth 的值是否合理,是否对net 有设flat OCV, 如果有分别check launch 跟capture path 的derate 值是否合理
check cross talk 引入的delta delay: 先看clock path 上的SI, 如果有较大较多的SI 要去找后端确认,clock path 的SI 要尽量修掉;再看data path 上的SI, 最好把大于某个值的SI 对应的net 都抓出来在layout 上看一下,然后再确定fix 的方向
check clock common point: 确认时钟分叉点,是不是时钟分叉太早,如果common path 非常短需要跟后端确认是否可以做长。
如果以上都合理,就需要详细check 每一级的cell 跟net delay, 最好在layout 上把该条path highlight 出来,先check 是否有cell 堆叠的情况尤其是buffer 跟inverter 的堆叠,如果有,需要找后端确认;再check delay 较大的某些cell 的输入transition 跟fanout 是否合理,如果transition 太大需要确认是由于前一级的驱动能力太弱还是输入net 太长造成的,如果fanout 太大需要找后端确认;再check delay 大的net, 在layout 上量一下该net 的距离,对于什么类型的cell 能驱动多长的net 自己心里要有数,而这个数是由对所用工艺研究得到的,如果某个cell 驱动了超出其能力所及的net 如果不能通过cell swap 解决,就找后端。


