增强学习(四) ----- 蒙特卡罗方法(Monte Carlo Methods)
蒙特卡罗方法又叫统计模拟方法,它使用随机数(或伪随机数)来解决计算的问题,是一类重要的数值计算方法。该方法的名字来源于世界著名的赌城蒙特卡罗,而蒙特卡罗方法正是以概率为基础的方法。
一个简单的例子可以解释蒙特卡罗方法,假设我们需要计算一个不规则图形的面积,那么图形的不规则程度和分析性计算(比如积分)的复杂程度是成正比的。而采用蒙特卡罗方法是怎么计算的呢?首先你把图形放到一个已知面积的方框内,然后假想你有一些豆子,把豆子均匀地朝这个方框内撒,散好后数这个图形之中有多少颗豆子,再根据图形内外豆子的比例来计算面积。当你的豆子越小,撒的越多的时候,结果就越精确。
现在我们开始讲解增强学习中的蒙特卡罗方法,与上篇的DP不同的是,这里不需要对环境的完整知识。蒙特卡罗方法仅仅需要经验就可以求解最优策略,这些经验可以在线获得或者根据某种模拟机制获得。
要注意的是,我们仅将蒙特卡罗方法定义在episode task上,所谓的episode task就是指不管采取哪种策略π,都会在有限时间内到达终止状态并获得回报的任务。比如玩棋类游戏,在有限步数以后总能达到输赢或者平局的结果并获得相应回报。
那么什么是经验呢?经验其实就是训练样本。比如在初始状态s,遵循策略π,最终获得了总回报R,这就是一个样本。如果我们有许多这样的样本,就可以估计在状态s下,遵循策略π的期望回报,也就是状态值函数Vπ(s)了。蒙特卡罗方法就是依靠样本的平均回报来解决增强学习问题的。
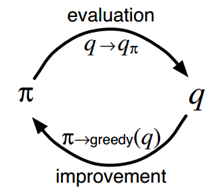
尽管蒙特卡罗方法和动态规划方法存在诸多不同,但是蒙特卡罗方法借鉴了很多动态规划中的思想。在动态规划中我们首先进行策略估计,计算特定策略π对应的Vπ和Qπ,然后进行策略改进,最终形成策略迭代。这些想法同样在蒙特卡罗方法中应用。
首先考虑用蒙特卡罗方法来学习状态值函数Vπ(s)。如上所述,估计Vπ(s)的一个明显的方法是对于所有到达过该状态的回报取平均值。这里又分为first-visit MC methods和every-visit MC methods。这里,我们只考虑first MC methods,即在一个episode内,我们只记录s的第一次访问,并对它取平均回报。
现在我们假设有如下一些样本,取折扣因子γ=1,即直接计算累积回报,则有
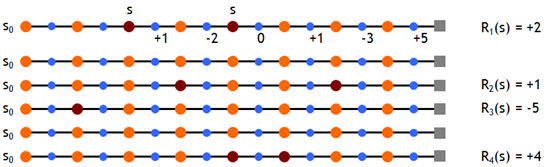
根据first MC methods,对出现过状态s的episode的累积回报取均值,有Vπ(s)≈ (2 + 1 – 5 + 4)/4 = 0.5
容易知道,当我们经过无穷多的episode后,Vπ(s)的估计值将收敛于其真实值。
在状态转移概率p(s'|a,s)已知的情况下,策略估计后有了新的值函数,我们就可以进行策略改进了,只需要看哪个动作能获得最大的期望累积回报就可以。然而在没有准确的状态转移概率的情况下这是不可行的。为此,我们需要估计动作值函数Qπ(s,a)。Qπ(s,a)的估计方法前面类似,即在状态s下采用动作a,后续遵循策略π获得的期望累积回报即为Qπ(s,a),依然用平均回报来估计它。有了Q值,就可以进行策略改进了

下面我们来探讨一下Maintaining Exploration的问题。前面我们讲到,我们通过一些样本来估计Q和V,并且在未来执行估值最大的动作。这里就存在一个问题,假设在某个确定状态s0下,能执行a0, a1, a2这三个动作,如果智能体已经估计了两个Q函数值,如Q(s0,a0), Q(s0,a1),且Q(s0,a0)>Q(s0,a1),那么它在未来将只会执行一个确定的动作a0。这样我们就无法更新Q(s0,a1)的估值和获得Q(s0,a2)的估值了。这样的后果是,我们无法保证Q(s0,a0)就是s0下最大的Q函数。
Maintaining Exploration的思想很简单,就是用soft policies来替换确定性策略,使所有的动作都有可能被执行。比如其中的一种方法是ε-greedy policy,即在所有的状态下,用1-ε的概率来执行当前的最优动作a0,ε的概率来执行其他动作a1, a2。这样我们就可以获得所有动作的估计值,然后通过慢慢减少ε值,最终使算法收敛,并得到最优策略。简单起见,在下面MC控制中,我们使用exploring start,即仅在第一步令所有的a都有一个非零的概率被选中。
6. 蒙特卡罗控制(Mote Carlo Control)
我们看下MC版本的策略迭代过程:

根据前面的说法,值函数Qπ(s,a)的估计值需要在无穷多episode后才能收敛到其真实值。这样的话策略迭代必然是低效的。在上一篇DP中,我们了值迭代算法,即每次都不用完整的策略估计,而仅仅使用值函数的近似值进行迭代,这里也用到了类似的思想。每次策略的近似值,然后用这个近似值来更新得到一个近似的策略,并最终收敛到最优策略。这个思想称为广义策略迭代。
具体到MC control,就是在每个episode后都重新估计下动作值函数(尽管不是真实值),然后根据近似的动作值函数,进行策略更新。这是一个episode by episode的过程。
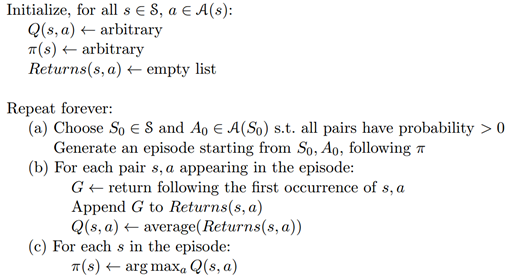
一个采用exploring starts的Monte Carlo control算法,如下图所示,称为Monte Carlo ES。而对于所有状态都采用soft policy的版本,这里不再讨论。
7. 小结
Monte Carlo方法的一个显而易见的好处就是我们不需要环境模型了,可以从经验中直接学到策略。它的另一个好处是,它对所有状态s的估计都是独立的,而不依赖与其他状态的值函数。在很多时候,我们不需要对所有状态值进行估计,这种情况下蒙特卡罗方法就十分适用。
不过,现在增强学习中,直接使用MC方法的情况比较少,而较多的采用TD算法族。但是如同DP一样,MC方法也是增强学习的基础之一,因此依然有学习的必要。
参考资料:
[1] R.Sutton et al. Reinforcement learning: An introduction, 1998
[2] Wikipedia,蒙特卡罗方法

