基于STM32和ROS的自主移动平台开发日志
最近一直在做这个slam自主移动平台,遇到了不少困难,然后随手记录一下吧。
这个平台用的asus的深度相机xiton pro live,但是我用的slam算法是gmapping,gmapping是需要输入激光数据的,所以需要把深度相机的点云数据转化为激光数据,讲道理,这个自己写很不是很难,但是ros还是给我提供了depth to laser 这个包,链接在此: http://wiki.ros.org/depthimage_to_laserscan ,这个包就是能把点云数据转化为激光数据输出。有现成的那就先用着吧。
开始我以为用ros 应该主要是用c++把,写cpp把,后来我才发现 我大部分时间在写launch文件 ;-)
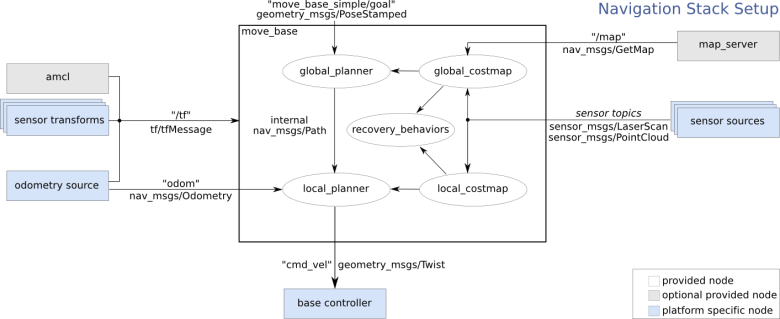
讲一下整体的思路把,首先你得看这个: http://wiki.ros.org/navigation/Tutorials ,事实证明,看官方文档往往是最给力最有效的解决问题的方式。这个图很明了。
ros和stm32的串口通讯 可以用boost::asio 来实现,也可以到github上下载现成的串口通信包。
通讯OK了以后,定义一个通讯协议,把里程计发上来,写一个ros节点,比如base_controller,接收并发布里程计数据,详细的操作看roswiki的例程把。
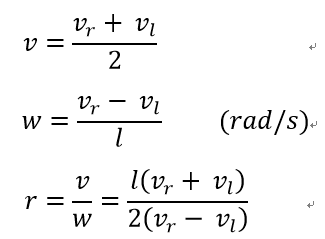
有一个坑就是,我现在的 方向角很不准确,因为我只是用两个轮子(差分驱动)的编码器来算方向角。对了,下图是把线速度角速度转化为两个轮子实际速度的公式。
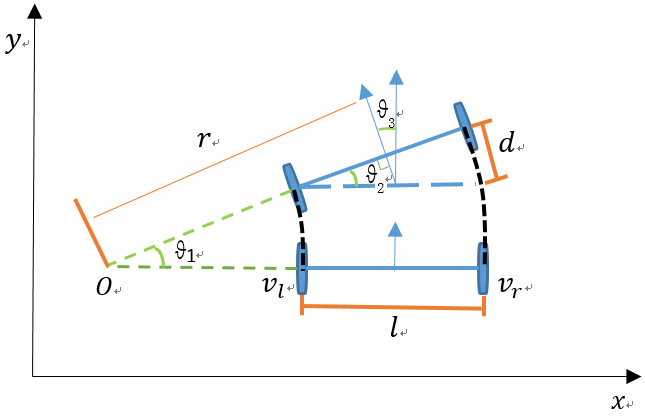
我们可以得到左右轮速度和线速度角速度之间的关系如下:
至于方向角,要加陀螺仪来解决这个问题。
发布里程计中也会发布tf,这个tf主要发布 世界坐标系和机器人坐标系 之间的关系。
