
线性二次型调节器LQR/LQC算法解析及求解器代码(matlab)
参考链接:http://120.52.51.14/stanford.edu/class/ee363/lectures/dlqr.pdf
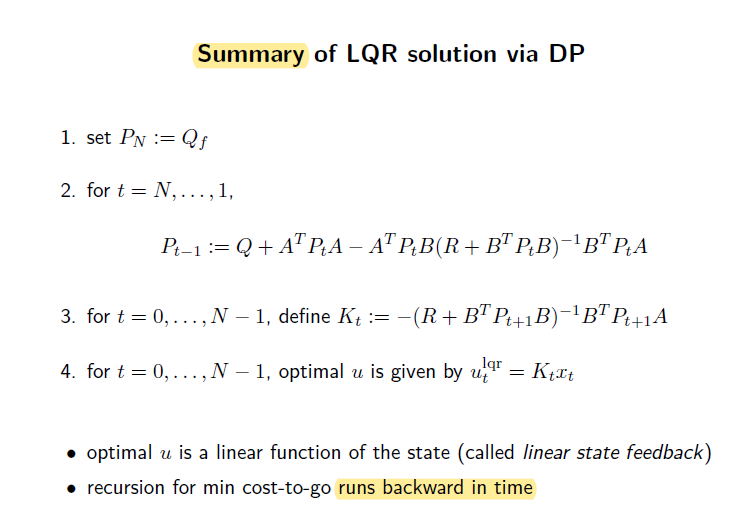
本文参考讲义中的第20页PPT,根据Hamilton-Jacobi方法,推导得到黎卡提方程的数值迭代求解方法(可实时在线求解黎卡提方程),具体推导过程请参考PPT。本文列出最后的结论及对应的matlab代码,其他编程语言也可参考贴出的代码自行改编。
对应的matlab代码如下:
%%%参考文献dlqr
close all
A=[1 1;0 1];
B=[0;1];
C=[1 0];
Q=C'*C;
Qf=C'*C;
R=10*ones(1,1);
[p,L,k] = dare(A,B,Q,R)
x0=[100;10]*1e-2;
N=20;%每一时间步求解器迭代次数,一般20足够,若不收敛,则适当增大该值
P=zeros(2,2,N+1);
P(:,:,N+1)=Qf;
for t=2:(N+1)
tUsed=(N+3-t);
P(:,:,tUsed-1)=Q+A'*P(:,:,tUsed)*A-A'*P(:,:,tUsed)*B/(R+B'*P(:,:,tUsed)*B)*B'*P(:,:,tUsed)*A;
end
s=P(:,:,1)
K=zeros(N,2);
U=zeros(N,1);
X=zeros(N+1,2);
X(1,:)=x0;
for t=1:N
K(t,:)=-(R+B'*P(:,:,t+1)*B)\B'*P(:,:,t+1)*A;
U(t,:)=K(t,:)*X(t,:)';
X(t+1,:)=(A*X(t,:)'+B*U(t,:))';
end
k=K(1,:)
figure (30)
PlotX=1:N;
plot(PlotX,K(:,1),'o-b');
hold on
plot(PlotX,K(:,2),'o-r');
title('反馈系数K')
figure (40)
PlotX=1:N+1;
plot(PlotX,X(:,1),'o-b');
hold on
plot(PlotX,X(:,2),'o-r');
title('状态X')
figure (50)
PlotX=1:N;
plot(PlotX,U(:,1),'o-b');
title('控制输入U')
