一、配置NC413各个寄存器
在欧姆龙编程软件CX-Programer中设置NC413的公共参数区,首先打开CX-Programer界面,在左侧工程工作区窗口中双击打开【IO表和单元设置】选项,出现如下图所示的【PLC IO表-OMRON】窗口。
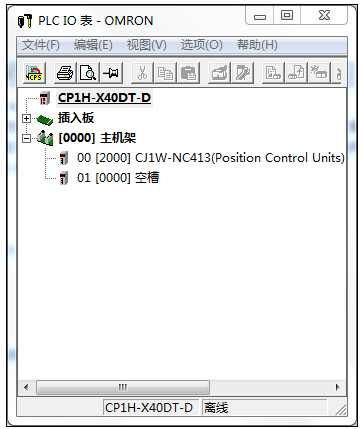
展开【0000主机架】双击00单元,选择模块NC413,选择好后如上图所示,在00[2000]处出现CJ1W-NC413信息。
双击CJ1W-NC413出现如下图所示的窗口。
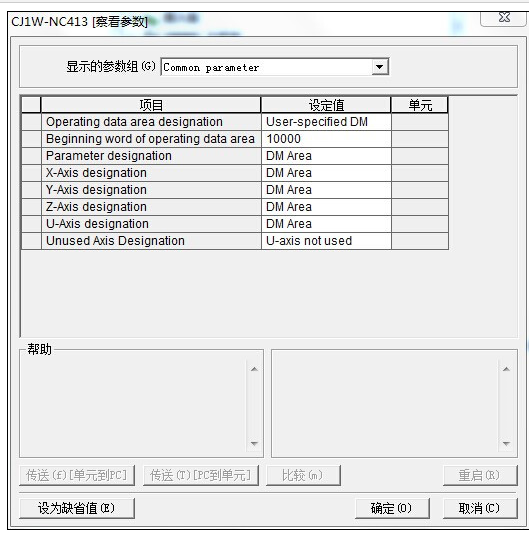
【Common paramater】为公共参数区,设置如上图所示,第一行【Operation data area designation】设置操作数区域为用户自定义,第二行【Beginning word of operating data area】设为10000,就是操作数的第一个寄存器从D10000开始。后面几行是把轴设为用户的DM区域,因为第一行设置了【用户自定义DM区】,所以此处必须都选择【DM Area】,最后一行配置了U轴不使用。说明U轴对应的输入接口的紧急停止输入信号可以不用接线。
在【显示的参数组】中分别选择各个轴,以X轴为例,设置如下图所示。
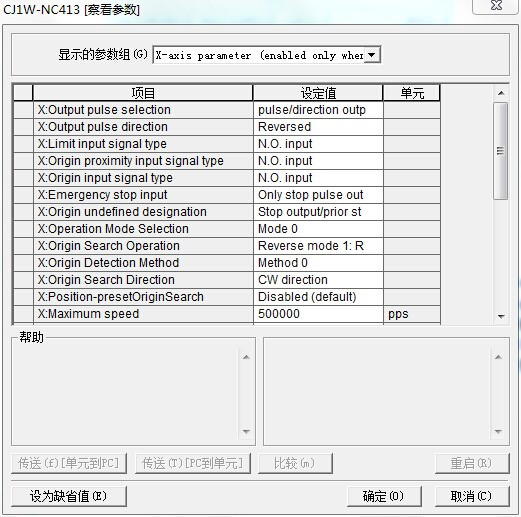
主要设置第一行,控制方式为【脉冲方向控制输出】,第二行是改变运行方向,可以默认,第三、四、五行改变限位信号的输入方式,改为常开信号输入,本示例是常开信号,其余参数保持黙认。其它轴类似。
设置完成。
一、JOG点动运行(包括方向)
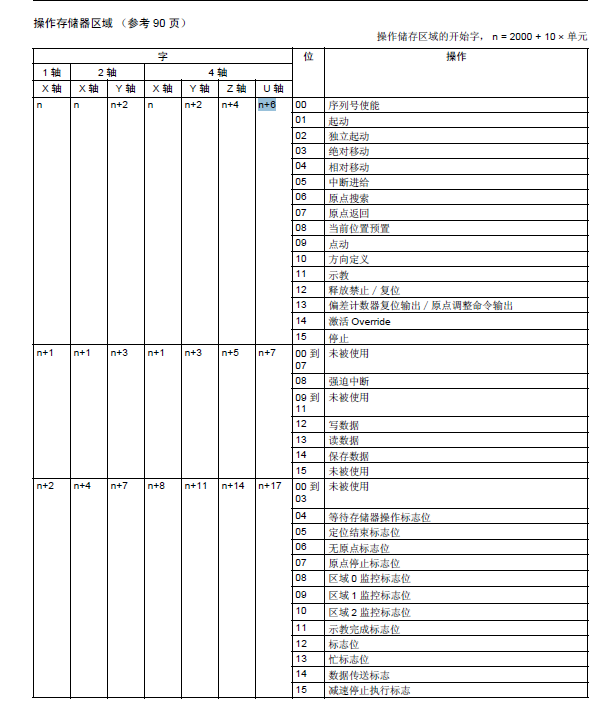
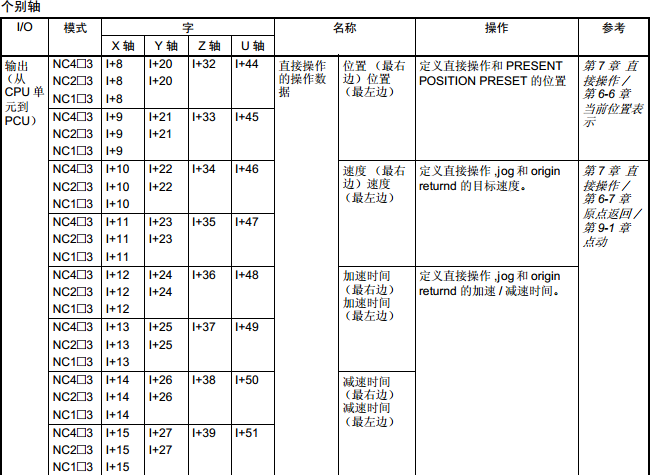
首先设置,点动运行的速度。如下图所示,I就是之前公共参数设置的D10000,那么速度对于NC413的X轴就是D10010,可以参考手册,然后设置加速时间和减速时间,分为是D10012和D10014,设置好这些参数后,就可以操作【操作存储器】区域。
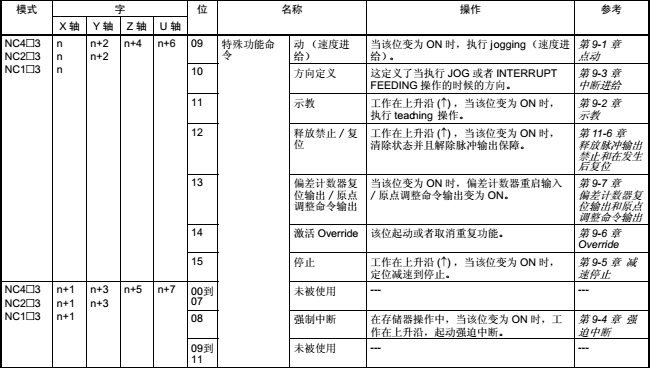
如上图所示,n为2000,NC413的X轴点动触发为2000.09,点动方向为2000.10,停止点为2000.15,控制这些点就可以控制X轴的点动。
二、相对运动控制
相对运动的位置、速度、加减速的设置如图5所示。设置方法与上面类似。
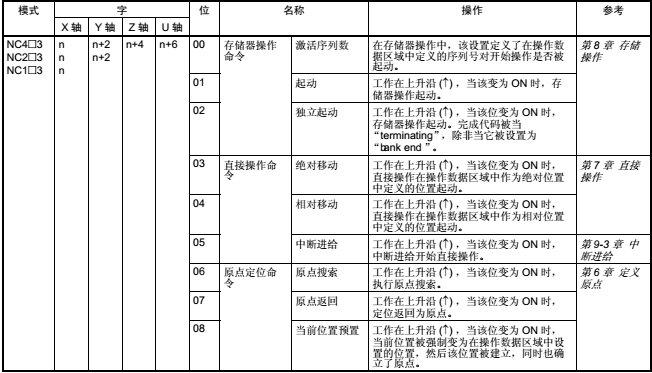
NC413的X轴相对运动触发点为20000.04,边沿检测,只要触发一次,伺服就会走图4上设定的位置。

三、绝对运动控制
和相对运动类似,走绝对位置之前,必须先回原点,如X轴原点搜索点为2000.06,原点搜索模式如图3所示,设置Reverse Mode1:R,遇到限位开关时反向。原点位置黙认定义为0位置。
此时如果希望伺服走到1000位置处,就在图4的位置寄存器中写入1000,再触发绝对移动位2000.03,如果要走到2000位置处,就在位置寄存器中写入2000,并触发2000.03即可。
四、中断进给控制
中断进给的功能是,如果触发2000.05中断进给信号,伺服就会运行直到模块的中断点有信号后再运行位置寄存器设定的位置(此处为补尝位置)后停止运行。如果位置设为0,只要中断有信号即可停止。
五、其它说明
以上的位置,速度,加减速度在各个模式中共用。2000.15能停止所有模式的运动。以下是模块的引脚定义。
以A组引脚为例,A1、A5、A7、A12、A20接24V,A2接0V,A6是脉冲,A8是方向,A15为中断信号,A13为原点输入信号(接伺服Z相),A17接原点近点信号(就是原位光电)。