
超声波手势识别(STM32四路超声波获取)
超声波手势识别在市场上已经有见实现,但研究其传感器发现并不是市场上随意可见的,如果暂且考虑成本,该如何入门实现简单的手势识别呢。聊天中老师给出一个很好的提议,就是固定四个超声波,分别为上下左右,然后进行程序上的对应编号,用单片机实现四路超声波的距离数据读取,然后程序分析读取的数据进而判断手势。STM32单片机有多个定时器,每个定时器接入一个超声波,分别接入四个,定时器分别开始工作以计数,将得到的距离信息一次性发送四个方向的值到串口,串口连接到PC机,PC机获取到四组值,然后进行分析解释。下面将实现第一步,STM32 实现四路超声波获取。
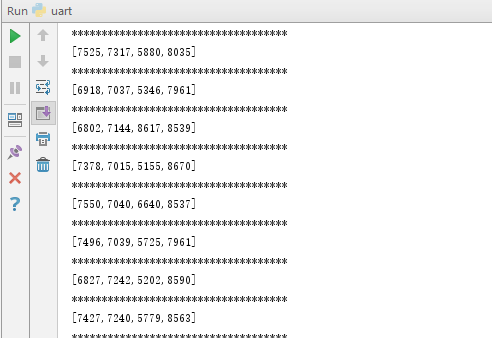
实现效果:
Python的串口程序上每次从串口获取到上下左右四组值,并输出在控制台,相关的串口实现可以参考:Python的串口通信(pyserial)

超声波模块:HC-SR04
单片机:stm32f103c8t6
注意:程序正常工作的前提是必须按复位键
获取值【上,下,左,右】
对应echo的IO【PA0 , PA11 , PA7 , PB6】
对应trig 的IO【PB12 , PB13 , PB14 , PB15】
对应定时器【定时器2通道1,高级定时器1通道4,定时器3通道2,定时器4通道1】
串口1:A9为TX A10为RX
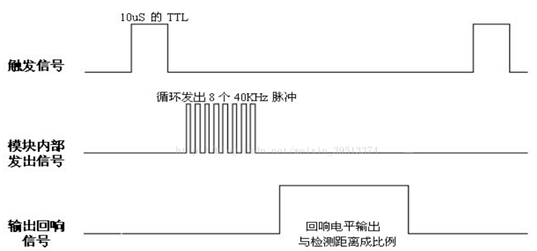
超声波使用基本介绍:
(1)采用IO口TRIG触发测距,给至少10us的高电平信号;
(2)模块自动发送8个40khz的方波,自动检测是否有信号返回;
(3)有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S)) (未实现)
超声波时序:
主函数代码:
1 #include "stm32f10x.h" //STM32头文件 2 #include "sys.h" 3 #include "delay.h" 4 #include "usart.h" 5 #include "timex.h" 6 #include "trig.h" 7 8 extern u8 TIM3CH1_CAPTURE_STA; //输入捕获状态 9 extern u16 TIM3CH1_CAPTURE_VAL; //输入捕获值 10 extern u8 TIM3CH2_CAPTURE_STA; //输入捕获状态 11 extern u16 TIM3CH2_CAPTURE_VAL; //输入捕获值 12 extern u8 TIM2CH1_CAPTURE_STA; //输入捕获状态 13 extern u16 TIM2CH1_CAPTURE_VAL; //输入捕获值 14 extern u8 TIM4CH1_CAPTURE_STA; //输入捕获状态 15 extern u16 TIM4CH1_CAPTURE_VAL; //输入捕获值 16 extern u8 TIM1CH4_CAPTURE_STA; //输入捕获状态 17 extern u16 TIM1CH4_CAPTURE_VAL; //输入捕获值 18 int main (void){//主程序 19 u32 temp1=0; 20 //u32 temp2=0; 21 u32 temp3=0; 22 u32 temp4=0; 23 u32 temp24=0; 24 RCC_Configuration(); //时钟设置 25 TR_Init(); //输出初始化 26 27 USART1_Init(115200); 28 29 TIM3_Cap_Init(0XFFFF,72-1); //以1Mhz的频率计数 //打印总的高点平时间 30 TIM2_Cap_Init(0XFFFF,72-1); //以1Mhz的频率计数 //打印总的高点平时间 31 TIM4_Cap_Init(0XFFFF,72-1); //以1Mhz的频率计数 //打印总的高点平时间 32 TIM1_Cap_Init(0XFFFF,72-1); //以1Mhz的频率计数 //打印总的高点平时间 33 delay_s(1); 34 printf("********** INIT ALL 11*********\r\n"); 35 PBout(12)=1; 36 delay_us(13); 37 PBout(12)=0; 38 39 PBout(14)=1; 40 delay_us(13); 41 PBout(14)=0; 42 43 PBout(15)=1; 44 delay_us(13); 45 PBout(15)=0; 46 47 PBout(13)=1; 48 delay_us(13); 49 PBout(13)=0; 50 51 while(1){ 52 //定时器2通道1 53 if(TIM2CH1_CAPTURE_STA&0X80)//成功捕获到了一次上升沿 54 { 55 temp1=TIM2CH1_CAPTURE_STA&0X3F; 56 temp1*=65536;//溢出时间总和 57 temp1+=TIM2CH1_CAPTURE_VAL;//得到总的高电平时间 58 printf("time2-----:%d \r\n",temp1);//打印总的高点平时间 59 TIM2CH1_CAPTURE_STA=0;//开启下一次捕获 60 PBout(12)=1; 61 delay_us(13); 62 PBout(12)=0; 63 } 64 65 //定时器1通道4 66 if(TIM1CH4_CAPTURE_STA&0X80)//成功捕获到了一次上升沿 67 { 68 temp24=TIM1CH4_CAPTURE_STA&0X3F; 69 temp24*=65536;//溢出时间总和 70 temp24+=TIM1CH4_CAPTURE_VAL;//得到总的高电平时间 71 printf("time14-----:%d \r\n",temp24);//打印总的高点平时间 72 TIM1CH4_CAPTURE_STA=0;//开启下一次捕获 73 PBout(13)=1; 74 delay_us(13); 75 PBout(13)=0; 76 } 77 //定时器3通道2 78 if(TIM3CH2_CAPTURE_STA&0X80)//成功捕获到了一次上升沿 79 { 80 temp3=TIM3CH2_CAPTURE_STA&0X3F; 81 temp3*=65536;//溢出时间总和 82 temp3+=TIM3CH2_CAPTURE_VAL;//得到总的高电平时间 83 printf("time32----:%d \r\n",temp3);//打印总的高点平时间 84 TIM3CH2_CAPTURE_STA=0;//开启下一次捕获 85 PBout(14)=1; 86 delay_us(13); 87 PBout(14)=0; 88 } 89 //定时器4通道1 90 if(TIM4CH1_CAPTURE_STA&0X80)//成功捕获到了一次上升沿 91 { 92 temp4=TIM4CH1_CAPTURE_STA&0X3F; 93 temp4*=65536;//溢出时间总和 94 temp4+=TIM4CH1_CAPTURE_VAL;//得到总的高电平时间 95 printf("time4-----:%d \r\n",temp4);//打印总的高点平时间 96 TIM4CH1_CAPTURE_STA=0;//开启下一次捕获 97 PBout(15)=1; 98 delay_us(13); 99 PBout(15)=0; 100 } 101 102 //发送最终结果------------------------------------ 103 if((temp1 >0)&&(temp24 >0)&&(temp3 >0)&&(temp4 >0)){ 104 105 printf("[%d,%d,%d,%d]",temp1,temp24,temp3,temp4); 106 temp1=temp24=temp3=temp4=0; 107 PBout(0)=1; 108 } 109 110 } 111 }
定时器2通道1代码实现:
1 #include"timex.h" 2 #include "usart.h" 3 4 //定时器3通道1输入捕获配置 5 6 TIM_ICInitTypeDef TIM2_ICInitStructure; 7 8 void TIM2_Cap_Init(u16 arr,u16 psc) 9 { 10 11 12 GPIO_InitTypeDef GPIO_InitStructure; 13 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; 14 NVIC_InitTypeDef NVIC_InitStructure; 15 printf("---time 22222 1111 ---\r\n"); 16 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //使能TIM2时钟 17 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIOA时钟 18 19 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //PA0清除之前设置 20 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0 输入 21 GPIO_Init(GPIOA, &GPIO_InitStructure); 22 GPIO_ResetBits(GPIOA,GPIO_Pin_0); //PA0下拉 23 24 //初始化定时器5 TIM5 25 TIM_TimeBaseStructure.TIM_Period = arr; //设定计数器自动重装值 26 TIM_TimeBaseStructure.TIM_Prescaler =psc; //预分频器 27 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim 28 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 29 TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 30 31 //初始化TIM5输入捕获参数 32 TIM2_ICInitStructure.TIM_Channel = TIM_Channel_1; //CC1S=01 选择输入端 IC1映射到TI1上 33 TIM2_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获 34 TIM2_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到TI1上 35 TIM2_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频 36 TIM2_ICInitStructure.TIM_ICFilter = 0x00;//IC1F=0000 配置输入滤波器 不滤波 37 TIM_ICInit(TIM2, &TIM2_ICInitStructure); 38 39 //中断分组初始化 40 NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //TIM3中断 41 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //先占优先级2级 42 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //从优先级0级 43 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能 44 NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器 45 //printf("***********************************\r\n"); 46 TIM_ITConfig(TIM2,TIM_IT_Update|TIM_IT_CC1,ENABLE);//允许更新中断 ,允许CC1IE捕获中断 47 48 TIM_Cmd(TIM2,ENABLE ); //使能定时器5 49 50 51 52 } 53 54 u8 TIM2CH1_CAPTURE_STA=0; //输入捕获状态 55 u16 TIM2CH1_CAPTURE_VAL; //输入捕获值 56 57 //定时器5中断服务程序 58 void TIM2_IRQHandler(void) 59 { 60 //printf("********************222222***************\r\n"); 61 if((TIM2CH1_CAPTURE_STA&0X80)==0)//还未成功捕获 62 { 63 if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET) 64 65 { 66 if(TIM2CH1_CAPTURE_STA&0X40)//已经捕获到高电平了 67 { 68 if((TIM2CH1_CAPTURE_STA&0X3F)==0X3F)//高电平太长了 69 { 70 TIM2CH1_CAPTURE_STA|=0X80;//标记成功捕获了一次 71 TIM2CH1_CAPTURE_VAL=0XFFFF; 72 }else TIM2CH1_CAPTURE_STA++; 73 } 74 } 75 if (TIM_GetITStatus(TIM2, TIM_IT_CC1) != RESET)//捕获1发生捕获事件 76 { 77 if(TIM2CH1_CAPTURE_STA&0X40) //捕获到一个下降沿 78 { 79 TIM2CH1_CAPTURE_STA|=0X80; //标记成功捕获到一次高电平脉宽 80 TIM2CH1_CAPTURE_VAL=TIM_GetCapture1(TIM2); 81 TIM_OC1PolarityConfig(TIM2,TIM_ICPolarity_Rising); //CC1P=0 设置为上升沿捕获 82 }else //还未开始,第一次捕获上升沿 83 { 84 TIM2CH1_CAPTURE_STA=0; //清空 85 TIM2CH1_CAPTURE_VAL=0; 86 TIM_SetCounter(TIM2,0); 87 TIM2CH1_CAPTURE_STA|=0X40; //标记捕获到了上升沿 88 TIM_OC1PolarityConfig(TIM2,TIM_ICPolarity_Falling); //CC1P=1 设置为下降沿捕获 89 } 90 } 91 } 92 93 TIM_ClearITPendingBit(TIM2, TIM_IT_CC1|TIM_IT_Update); //清除中断标志位 94 95 }
定时器1通道4实现:
1 #include"timex.h" 2 #include "usart.h" 3 4 5 6 TIM_ICInitTypeDef TIM1_ICInitStructure; 7 8 void TIM1_Cap_Init(u16 arr,u16 psc) 9 { 10 11 GPIO_InitTypeDef GPIO_InitStructure; 12 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; 13 NVIC_InitTypeDef NVIC_InitStructure; 14 printf("---time 11111 4444 ---\r\n"); 15 RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); //使能时钟 16 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); 17 18 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_11; //清除之前设置 19 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; // 输入 20 GPIO_Init(GPIOA, &GPIO_InitStructure); 21 GPIO_ResetBits(GPIOA,GPIO_Pin_8|GPIO_Pin_11); //下拉 22 23 //初始化定时器1 24 TIM_TimeBaseStructure.TIM_Period = arr; //设定计数器自动重装值 25 TIM_TimeBaseStructure.TIM_Prescaler =psc; //预分频器 26 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim 27 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 28 TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 29 30 //初始化TIM1 31 TIM1_ICInitStructure.TIM_Channel = TIM_Channel_4; //CC1S=01 选择输入端 IC1映射到TI1上 32 TIM1_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获 33 TIM1_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到TI1上 34 TIM1_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频 35 TIM1_ICInitStructure.TIM_ICFilter = 0x00;//IC1F=0000 配置输入滤波器 不滤波 36 TIM_ICInit(TIM1, &TIM1_ICInitStructure); 37 38 //中断分组初始化 39 // Device header 40 NVIC_InitStructure.NVIC_IRQChannel = TIM1_CC_IRQn; //中断 41 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //先占优先级2级 42 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //从优先级0级 43 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能 44 NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器 45 46 TIM_ITConfig(TIM1,TIM_IT_CC4|TIM_IT_Update,ENABLE);//允许更新中断 ,允许CC1IE捕获中断 47 48 TIM_Cmd(TIM1,ENABLE ); //使能定时器1 49 50 } 51 52 53 u8 TIM1CH4_CAPTURE_STA=0; //输入捕获状态 54 int TIM1CH4_CAPTURE_VAL_0,TIM1CH4_CAPTURE_VAL; //输入捕获值 55 //定时器5中断服务程序 56 void TIM1_UP_IRQHandler(void) 57 { 58 59 if((TIM1CH4_CAPTURE_STA&0X80)==0)//还未成功捕获 60 { 61 if (TIM_GetITStatus(TIM1, TIM_IT_Update) != RESET) 62 63 { 64 if(TIM1CH4_CAPTURE_STA&0X40)//已经捕获到高电平了 65 { 66 if((TIM1CH4_CAPTURE_STA&0X3F)==0X3F)//高电平太长了 67 { 68 TIM1CH4_CAPTURE_STA|=0X80;//标记成功捕获了一次 69 TIM1CH4_CAPTURE_VAL=0XFFFF; 70 }else TIM1CH4_CAPTURE_STA++; 71 } 72 } 73 } 74 75 TIM_ClearITPendingBit(TIM1, TIM_IT_Update); //清除中断标志位 76 77 78 79 } 80 void TIM1_CC_IRQHandler(void) 81 { 82 if((TIM1CH4_CAPTURE_STA&0X80)==0)//还未成功捕获 83 { 84 if (TIM_GetITStatus(TIM1, TIM_IT_CC4) != RESET)//捕获1发生捕获事件 85 { 86 if(TIM1CH4_CAPTURE_STA&0X40) //捕获到一个下降沿 87 { 88 TIM1CH4_CAPTURE_STA|=0X80; //标记成功捕获到一次上升沿 89 TIM1CH4_CAPTURE_VAL=TIM_GetCapture4(TIM1)-TIM1CH4_CAPTURE_VAL_0; 90 TIM_OC4PolarityConfig(TIM1,TIM_ICPolarity_Rising); //CC1P=0 设置为上升沿捕获 91 }else //还未开始,第一次捕获上升沿 92 { 93 TIM1CH4_CAPTURE_STA=0; //清空 94 TIM1CH4_CAPTURE_VAL_0=TIM_GetCapture4(TIM1);//!!!!!!!!!!!!!!!!!!!!!!! 95 //TIM_SetCounter(TIM1,0); 96 TIM1CH4_CAPTURE_STA|=0X40; //标记捕获到了上升沿 97 TIM_OC4PolarityConfig(TIM1,TIM_ICPolarity_Falling); //CC1P=1 设置为下降沿捕获 98 } 99 } 100 } 101 102 TIM_ClearITPendingBit(TIM1, TIM_IT_CC1); //清除中断标志位 103 104 }
定时器3通道2代码实现:
1 #include"timex.h" 2 #include "usart.h" 3 4 //定时器3通道1输入捕获配置 5 6 TIM_ICInitTypeDef TIM3_ICInitStructure; 7 TIM_ICInitTypeDef TIM3_ICInitStructure1; 8 void TIM3_Cap_Init(u16 arr,u16 psc) 9 { 10 11 GPIO_InitTypeDef GPIO_InitStructure; 12 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; 13 NVIC_InitTypeDef NVIC_InitStructure; 14 15 printf("---time 33333 2222 ---\r\n"); 16 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能时钟 17 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); 18 19 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7; //清除之前设置 20 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //输入 21 GPIO_Init(GPIOA, &GPIO_InitStructure); 22 GPIO_ResetBits(GPIOA,GPIO_Pin_6 | GPIO_Pin_7); //下拉 23 24 //初始化定时器5 TIM5 25 TIM_TimeBaseStructure.TIM_Period = arr; //设定计数器自动重装值 26 TIM_TimeBaseStructure.TIM_Prescaler =psc; //预分频器 27 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim 28 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 29 TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 30 31 //初始化TIM5输入捕获参数 32 TIM3_ICInitStructure.TIM_Channel = TIM_Channel_1; //CC1S=01 选择输入端 IC1映射到TI1上 33 TIM3_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获 34 TIM3_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到TI1上 35 TIM3_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频 36 TIM3_ICInitStructure.TIM_ICFilter = 0x00;//IC1F=0000 配置输入滤波器 不滤波 37 TIM_ICInit(TIM3, &TIM3_ICInitStructure); 38 39 //初始化TIM5输入捕获参数 40 TIM3_ICInitStructure1.TIM_Channel = TIM_Channel_2; //CC1S=01 选择输入端 IC1映射到TI1上 41 TIM3_ICInitStructure1.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获 42 TIM3_ICInitStructure1.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到TI2上!!!!!!!!!!!!!! !!!!! 43 TIM3_ICInitStructure1.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频 44 TIM3_ICInitStructure1.TIM_ICFilter = 0x00;//IC1F=0000 配置输入滤波器 不滤波 45 TIM_ICInit(TIM3, &TIM3_ICInitStructure1); 46 47 48 49 50 //中断分组初始化 51 NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断 52 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //先占优先级2级 53 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //从优先级0级 54 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能 55 NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器 56 //printf("***********************************\r\n"); 57 TIM_ITConfig(TIM3,TIM_IT_Update|TIM_IT_CC1|TIM_IT_CC2,ENABLE);//允许更新中断 ,允许CC1IE捕获中断 58 59 TIM_Cmd(TIM3,ENABLE ); //使能定时器5 60 61 62 63 } 64 65 u8 TIM3CH1_CAPTURE_STA=0; //输入捕获状态 66 u16 TIM3CH1_CAPTURE_VAL; //输入捕获值 67 68 u8 TIM3CH2_CAPTURE_STA=0; //输入捕获状态 69 u16 TIM3CH2_CAPTURE_VAL; //输入捕获值 70 71 void TIM3_IRQHandler(void) 72 { 73 //printf("********************222222***************\r\n"); 74 75 if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) 76 77 { 78 if((TIM3CH1_CAPTURE_STA&0X80)==0)//还未成功捕获 79 { 80 if(TIM3CH1_CAPTURE_STA&0X40)//已经捕获到高电平了 81 { 82 if((TIM3CH1_CAPTURE_STA&0X3F)==0X3F)//高电平太长了 83 { 84 85 TIM3CH1_CAPTURE_VAL=0XFFFF; 86 TIM3CH1_CAPTURE_STA|=0X80;//标记成功捕获了一次 87 }else TIM3CH1_CAPTURE_STA++; 88 } 89 } 90 91 92 if((TIM3CH2_CAPTURE_STA&0X80)==0)//还未成功捕获 93 { 94 if(TIM3CH2_CAPTURE_STA&0X40)//已经捕获到高电平了 95 { 96 if((TIM3CH2_CAPTURE_STA&0X3F)==0X3F)//高电平太长了 97 { 98 99 TIM3CH2_CAPTURE_VAL=0XFFFF; 100 TIM3CH2_CAPTURE_STA|=0X80;//标记成功捕获了一次 101 }else TIM3CH2_CAPTURE_STA++; 102 } 103 104 } 105 }else{ 106 107 108 109 110 if((TIM3CH1_CAPTURE_STA&0X80)==0)//还未成功捕获 111 { 112 if (TIM_GetITStatus(TIM3, TIM_IT_CC1) != RESET)//捕获1发生捕获事件 113 { 114 115 if(TIM3CH1_CAPTURE_STA&0X40) //捕获到一个下降沿 116 { 117 TIM3CH1_CAPTURE_STA|=0X80; //标记成功捕获到一次高电平脉宽 118 TIM3CH1_CAPTURE_VAL=TIM_GetCapture1(TIM3); 119 TIM_OC1PolarityConfig(TIM3,TIM_ICPolarity_Rising); //CC1P=0 设置为上升沿捕获 120 }else //还未开始,第一次捕获上升沿 121 { 122 TIM3CH1_CAPTURE_STA=0; //清空 123 TIM3CH1_CAPTURE_VAL=0; 124 TIM_SetCounter(TIM3,0); 125 126 TIM_OC1PolarityConfig(TIM3,TIM_ICPolarity_Falling); //CC1P=1 设置为下降沿捕获 127 TIM3CH1_CAPTURE_STA|=0X40; //标记捕获到了上升沿 128 } 129 } 130 } 131 132 133 134 135 if((TIM3CH2_CAPTURE_STA&0X80)==0)//还未成功捕获 136 { 137 if (TIM_GetITStatus(TIM3, TIM_IT_CC2) != RESET)//捕获1发生捕获事件 138 { 139 if(TIM3CH2_CAPTURE_STA&0X40) //捕获到一个下降沿 140 { 141 TIM3CH2_CAPTURE_STA|=0X80; //标记成功捕获到一次高电平脉宽 142 TIM3CH2_CAPTURE_VAL=TIM_GetCapture2(TIM3); 143 TIM_OC2PolarityConfig(TIM3,TIM_ICPolarity_Rising); //CC1P=0 设置为上升沿捕获 144 }else //还未开始,第一次捕获上升沿 145 { 146 TIM3CH2_CAPTURE_STA=0; //清空 147 TIM3CH2_CAPTURE_VAL=0; 148 TIM_SetCounter(TIM3,0); 149 150 TIM_OC2PolarityConfig(TIM3,TIM_ICPolarity_Falling); //CC1P=1 设置为下降沿捕获 151 TIM3CH2_CAPTURE_STA|=0X40; //标记捕获到了上升沿 152 } 153 } 154 155 }} 156 // TIM_SetCounter(TIM3,0); 157 TIM_ClearITPendingBit(TIM3, TIM_IT_CC1|TIM_IT_Update|TIM_IT_CC2); //清除中断标志位 158 159 }
定时器4通道1代码实现:
1 #include"timex.h" 2 #include "usart.h" 3 4 //定时器4通道1输入捕获配置 5 6 TIM_ICInitTypeDef TIM4_ICInitStructure; 7 8 void TIM4_Cap_Init(u16 arr,u16 psc) 9 { 10 11 12 GPIO_InitTypeDef GPIO_InitStructure; 13 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; 14 NVIC_InitTypeDef NVIC_InitStructure; 15 printf("---time 44444 1111 ---\r\n"); 16 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能TIM4时钟 17 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能GPIOB时钟 18 19 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //清除之前设置 20 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //输入 21 GPIO_Init(GPIOB, &GPIO_InitStructure); 22 GPIO_ResetBits(GPIOB,GPIO_Pin_6); // 下拉 23 24 //初始化定时器5 TIM5 25 TIM_TimeBaseStructure.TIM_Period = arr; //设定计数器自动重装值 26 TIM_TimeBaseStructure.TIM_Prescaler =psc; //预分频器 27 TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim 28 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 29 TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位 30 31 //初始化TIM5输入捕获参数 32 TIM4_ICInitStructure.TIM_Channel = TIM_Channel_1; //CC1S=01 选择输入端 IC1映射到TI1上 33 TIM4_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获 34 TIM4_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到TI1上 35 TIM4_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频 36 TIM4_ICInitStructure.TIM_ICFilter = 0x00;//IC1F=0000 配置输入滤波器 不滤波 37 TIM_ICInit(TIM4, &TIM4_ICInitStructure); 38 39 //中断分组初始化 40 NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn; //TIM3中断 41 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //先占优先级2级 42 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //从优先级0级 43 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能 44 NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器 45 //printf("***********************************\r\n"); 46 TIM_ITConfig(TIM4,TIM_IT_Update|TIM_IT_CC1,ENABLE);//允许更新中断 ,允许CC1IE捕获中断 47 48 TIM_Cmd(TIM4,ENABLE ); //使能定时器5 49 50 51 52 } 53 54 u8 TIM4CH1_CAPTURE_STA=0; //输入捕获状态 55 u16 TIM4CH1_CAPTURE_VAL; //输入捕获值 56 57 //定时器5中断服务程序 58 void TIM4_IRQHandler(void) 59 { 60 //printf("********************222222***************\r\n"); 61 if((TIM4CH1_CAPTURE_STA&0X80)==0)//还未成功捕获 62 { 63 if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET) 64 65 { 66 if(TIM4CH1_CAPTURE_STA&0X40)//已经捕获到高电平了 67 { 68 if((TIM4CH1_CAPTURE_STA&0X3F)==0X3F)//高电平太长了 69 { 70 TIM4CH1_CAPTURE_STA|=0X80;//标记成功捕获了一次 71 TIM4CH1_CAPTURE_VAL=0XFFFF; 72 }else TIM4CH1_CAPTURE_STA++; 73 } 74 } 75 if (TIM_GetITStatus(TIM4, TIM_IT_CC1) != RESET)//捕获1发生捕获事件 76 { 77 if(TIM4CH1_CAPTURE_STA&0X40) //捕获到一个下降沿 78 { 79 TIM4CH1_CAPTURE_STA|=0X80; //标记成功捕获到一次高电平脉宽 80 TIM4CH1_CAPTURE_VAL=TIM_GetCapture1(TIM4); 81 TIM_OC1PolarityConfig(TIM4,TIM_ICPolarity_Rising); //CC1P=0 设置为上升沿捕获 82 }else //还未开始,第一次捕获上升沿 83 { 84 TIM4CH1_CAPTURE_STA=0; //清空 85 TIM4CH1_CAPTURE_VAL=0; 86 TIM_SetCounter(TIM4,0); 87 TIM4CH1_CAPTURE_STA|=0X40; //标记捕获到了上升沿 88 TIM_OC1PolarityConfig(TIM4,TIM_ICPolarity_Falling); //CC1P=1 设置为下降沿捕获 89 } 90 } 91 } 92 93 TIM_ClearITPendingBit(TIM4, TIM_IT_CC1|TIM_IT_Update); //清除中断标志位 94 95 }

