
卷积神经网络 Convolutional Neural Networks (LeNet)
CNN(卷积神经网络)是传统神经网络的变种,CNN在传统神经网络的基础上,引入了卷积和pooling。与传统的神经网络相比,CNN更适合用于图像中,卷积和图像的局部特征相对应,pooling使得通过卷积获得的feature具有空间不变性
接触的最多的卷积应该是高斯核,用于对图像进行平滑,或者是实现在不同尺度下的运算等。这里的卷积和高斯核是同一个类型,就是定义了一个卷积的尺度,然后卷积的具体参数就是神经网络中的参数,通过计算神经网络的参数,相当于学到了多个卷积的参数,而每个卷积可以看成是对图像进行特征提取(一个特征核),CNN网络就可以看成是前面的几层都是在提取图像的特征,最后一层$softmax$用于对提取的特征进行分类。所有CNN的特征是自学习(相对于SIFT,SURF)
conv2d是theano中的用于计算卷积的方法(theano.tensor.conv2($input$, $W$)),其中$W$表示卷积核。$W$是必须是一个4D的tensor(T.tensor4),$input$也必须是一个4D的tensor。
下面说下$input$和$W$中每个维度分别表示的意义。
$input \in (batches, feature, I_h, I_w)$分别表示batch size,number of feature map, image height ,image width
$W \in (filters, feature, f_h, f_w)$ 分别表示number of filters, number of feature map, filter height, filter width
其中$W_{shape[1]}$必须等于$input_{shape[1]}$。$W_{shape[1]} = 1$表示这个filter是在2D空间中的filter,$W_{shape[1]} > 1$表示这个filter是3D中间中的filter,如果$W_{shape[1]} = 3$这是这个filter是图像3通道上的filter,3个通道上进行卷积。
\begin{equation} input \in (batches, feature, I_h, I_w) \\ W \in (filters, feature, f_h, f_w) \end{equation}
\begin{equation} output = input \otimes W \\ output \in (batches, filters , I_h - f_h + 1, I_w - f_w + 1) \end{equation}
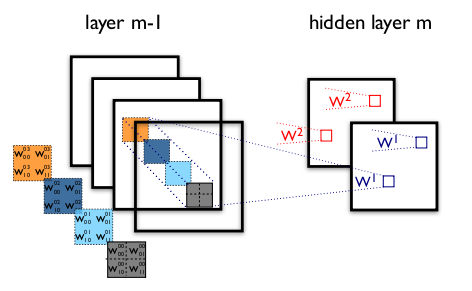
Pooling是在二维空间中操作的,如上图所示,将特征按照空间位置分成大的block,然后再每个block中计算特征。$max pooling$就是在这个block中计算所有位置的最大值作为特征,$average pooling$为计算区域内的特征均值
为什么需要pooling,图像分类中的BOW也适用了Pooling。我认为,在CNN中适用pooling的好处主要有两点:
1.如果不使用pooling,那么通过卷积计算得到的隐层节点的个数是卷积类型的倍数。举个例子:如上面的$input$,和$W$,$input$中每个patch的输入节点个数为$feature \times I_h \times I_w$,通过$W$的卷积运算后,$output$的节点数目为$filters \times (I_h - f_h + 1) \times (I_w - f_w + 1)$,如果引入pooling策略,$output$的节点数目就变为$filters \times \frac{I_h - f_h + 1}{p_h} \times \frac{I_w - f_w + 1}{p_w}$其中$p_h, p_w$表示pooling中每个区域的大小。从而减少了隐含层节点的个数,降低了计算复杂度。
2.引入pooling的另外一个好处就是使得CNN的模型具有局部区域内的平移或者旋转的一些不变性。很多精心设计的特征,如SIFT,SURF,HOG等等都具有这些不变性。不变性使得CNN在图像分类的问题中能够大方光彩,取得较好的performance。
在theano中,用于计算pooling的函数为$\text{theano.tensor.signal.downsample.max_pool_2d}$。对一个$N(N \geq 2)$维的输入矩阵,通过定义$p_h, p_w$然后对输入数据进行pooling
在Deep Learning tutorial的Convolutional Neural Network(LeNet)中,改例子用于MNIST数据集的字符识别(10个类别,识别阿拉伯数字),每个字符为$28\times28$的像素的输入,50000个样本用于训练,10000个样本用于交叉验证,另外10000个用于测试。可以在这里下载MNIST,另外,模型采用基于mini-batch的SGD进行优化。
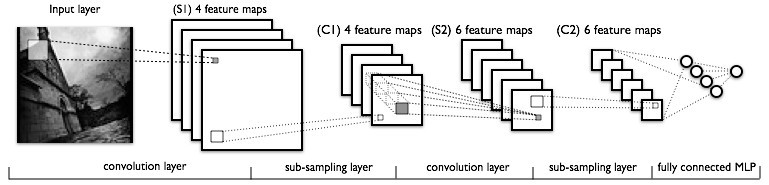
这个用于识别手写数字的CDNN模型的结构是这样过如最前面那个图所示。
输入层:每个mini-batch的原始图像$image shape = (batch size, 1, 28, 28)$
layer0_input = x.reshape((batch_size, 1, 28, 28))
卷积层1:对于输入的每个mini-batch的数据,output为卷积+pooling处理后的结果,第一层卷积类型为$nkerns[0]=20$个,卷积核的尺度为$f_h = 5, f_w = 5$
pooling的尺度为$(2,2)$
通过卷积,$filtershape=(nkerns[0],1,5,5)$,图像的尺度变化$(I_h -f_h + 1, I_w - f_w +1) \to (28, 28) ---> (24,24)$
通过pooling后$(24, 24) ---> (24/2,24/2)$
feature map的维度变为卷积类型数,所有$outputshape=(batch size, nkerns[0], 12, 12)$
layer0 = LeNetConvPoolLayer(rng, input=layer0_input, image_shape=(batch_size,1,28,28), filter_shape=(nkerns[0], 1, 5, 5), poolsize=(2,2))
卷积层2:输入为卷积层1的输出,所以$inputsize=(batch size, nkerns[0], 12, 12)$
通过卷积,$filtershape=(nkerns[1],nkerns[0],5,5)$,图像的尺度变化$(I_h -f_h + 1, I_w - f_w +1) \to (12, 12) ---> (8, 8)$
通过pooling后$(8, 8) ---> (8/2, 8/2)$
feature map的维度变为卷积类型数,所有$outputshape=(batch size, nkerns[1], 4, 4)$
layer1 = LeNetConvPoolLayer(rng, input=layer0.output, image_shape=(batch_size, nkerns[0], 12, 12), filter_shape=(nkerns[1], nkerns[0], 5,5), poolsize=(2,2))
全连接层:输入为卷积层2的输出,并将输入转化为$1D$的向量,所以$inputsize=nkerns[1]*4*4$
该层为普通的全连接层,和普通的神经网络一样,输入层的每个节点都与输出层的每个节点相连接
输出层的output节点个数在这里设置为$500$
Layer2_input = layer1.output.flatten(2) # construct a fully-connected sigmoidal layer layer2 = HiddenLayer(rng, input=Layer2_input, n_in=nkerns[1]*4*4, n_out=500, activation=T.tanh)
SoftMax层:最后一层是用于分类的softmax层,输入为上一层的输出,$input=500$
输出层的Classification的类别数,在这里为10。
# classify the values of the fully-connected sigmoidal layer layer3 = LogisticRegression(input=layer2.output, n_in=500, n_out=10)
(1) import部分

import sys import time import theano import theano.tensor as T import numpy as np from theano.tensor.nnet import conv from theano.tensor.signal import downsample from LogistRegression import LogisticRegression, load_data from mlp import HiddenLayer
(2) LeNetConvPoolLayer的定义部分
$input:$表示输入数据
$rng:$卷积核的随机函数种子
$filtershape:$卷积核的参数维度
$imageshape:$输入数据的维度
值得一提的是初始化参数的设置方法,一种方式如下:
$fanin:$每个输出节点需要多少个input进行输入,这种方式没有考虑maxpooling
fan_in = np.prod(filter_shape[1:]) W_values = np.asarray(rng.uniform( low=-np.sqrt(3./fan_in), high=np.sqrt(3./fan_in), size=filter_shape), dtype=theano.config.floatX) self.W = theano.shared(value=W_values, name='W')
另外一种方式为
fan_in = np.prod(filter_shape[1:]) # each unit in the lower layer receives a gradient from: # "num output feature maps * filter height * filter width" / # pooling size fan_out = (filter_shape[0] * np.prod(filter_shape[2:])/np.prod(poolsize)) # initialize weights with random weights W_bound = np.sqrt(6. / (fan_in + fan_out)) W_values = np.asarray(rng.uniform( low=-W_bound, high=W_bound, size=filter_shape), dtype=theano.config.floatX)
$fanin:$和第一种方式一样,只不过这里多了$fanout$
如果不考虑pooling,那么$fanout=filter_shape[0]*np.prod(filter_shape[2:])$
考虑了pooling之后,$fanout=filter_shape[0]*np.prod(filter_shape[2:])/np.prod(poolsize)$
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 | class LeNetConvPoolLayer(object): def __init__(self, rng, input, filter_shape, image_shape, poolsize=(2,2)): """ Alloc a LeNetConvPoolLayer with shared variable internal parameters :type rng: numpy.random.RandomState :param rng: a random number generator used to initilize weights :type input: theano.tensor.dtensor4 :param input: symbolic image tensor, of shape image_shape :type filter_shape: tuple or list of length 4 :param filter_shape: (number of filters, num input feature maps, filter height, filter width) :type image_shape: tuple or list of length 4 :param image_shape: (batch size, num input feature maps, image height, image width) :type poolsize: tuple or list of length 2 :param poolsize: the downsampling (pooling) factor (#rows, #cols) """ # why ? pleas look for http://www.cnblogs.com/cvision/p/3276577.html assert image_shape[1] == filter_shape[1] self.input = input # initilize weights values: the fan-in of each hidden neuron is # restrited by the size of the receptive fields """ fan_in = np.prod(filter_shape[1:]) W_values = np.asarray(rng.uniform( low=-np.sqrt(3./fan_in), high=np.sqrt(3./fan_in), size=filter_shape), dtype=theano.config.floatX) self.W = theano.shared(value=W_values, name='W') """ fan_in = np.prod(filter_shape[1:]) # each unit in the lower layer receives a gradient from: # "num output feature maps * filter height * filter width" / # pooling size fan_out = (filter_shape[0] * np.prod(filter_shape[2:])/np.prod(poolsize)) # initialize weights with random weights W_bound = np.sqrt(6. / (fan_in + fan_out)) W_values = np.asarray(rng.uniform( low=-W_bound, high=W_bound, size=filter_shape), dtype=theano.config.floatX) self.W = theano.shared(value=W_values, name='W') #print self.W.get_value() # the bias is a 1D theano -- one bias per output feature map b_values = np.zeros((filter_shape[0],),dtype=theano.config.floatX); self.b = theano.shared(value=b_values, name='b') # convolve input feature maps with filters conv_out = conv.conv2d(input, self.W, filter_shape=filter_shape, image_shape=image_shape) # downsample each feature map individually, using maxpooling pooled_out = downsample.max_pool_2d(conv_out, poolsize, ignore_border=True) # add the bias term. Since the bias term is a vector(1D array), we first # reshape it to a tensor of shape(1, n_filters, 1, 1). Each bias will # thus be broadcasted across mini-batches and feature map with & height self.output = T.tanh(pooled_out + self.b.dimshuffle('x', 0, 'x', 'x')) self.params = [self.W, self.b] |
(3) LeNet网络结构定义
首先将数据处理成patch的格式,在这里是通过patch_index来实现的
n_train_batches = train_set_x.get_value(borrow=True).shape[0] / batch_size n_valid_batches = valid_set_x.get_value(borrow=True).shape[0] / batch_size n_test_batches = test_set_x.get_value(borrow=True).shape[0] / batch_size
具体代码如下
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 | def evaluate_lenet5(learning_rate=0.1, n_epochs=200,dataset = './data/mnist.pkl.gz', nkerns=[20, 50], batch_size=500): """ Demostartes lenet on MNIST dataset :type learning_rate: float :param learning_rate: learning rate used(factor for the stochastic gradient) :type n_epochs: int :param n_epochs: maximal number of epochs to run the optimizer :type dataset: string :param dataset: path to the dataset used for training / testing :type nkerns: list of ints :param nkerns: number of kernels on each LeNetConvPoolLayer :type batch_size : int :param batch_size : size of data in each batch """ #used for LeNetConvPoolLayer to random the filter weights rng = np.random.RandomState(23455) datasets = load_data(dataset) print >> sys.stdout, '...load data is ok' # get train_set vaild_set and test set train_set_x, train_set_y = datasets[0] valid_set_x, valid_set_y = datasets[1] test_set_x, test_set_y = datasets[2] # calculate there are how many batches n_train_batches = train_set_x.get_value(borrow=True).shape[0] / batch_size n_valid_batches = valid_set_x.get_value(borrow=True).shape[0] / batch_size n_test_batches = test_set_x.get_value(borrow=True).shape[0] / batch_size #print "n_train_batches = %d n_valid_batches = %d n_test_batches = %d" %(train_set_x.get_value(borrow=True).shape[0], # valid_set_x.get_value(borrow=True).shape[0],test_set_x.get_value(borrow=True).shape[0]) ###################### # BUILD ACTUAL MODEL # ###################### print '...building the model' index = T.lscalar() # index to [mini]batches x = T.matrix('x') # images y = T.ivector('y') # the labels ishape = (28, 28) # the size of MNIST images # Reshape matrix of images of shape(batches, 28 * 28) # to a 4D tensor, compatible with our LeNetConvPoolLayer layer0_input = x.reshape((batch_size, 1, 28, 28)) # Construct the first convolutional pooling layer: # filtering reduce the image size to (I_h - f_h + 1, I_w - f_w + 1) # this problem is (28, 28)---->(28-5+1, 28-5+1)=(24,24) # maxpooling reduces this futher to (24/2, 24/2)= (12, 12) # so the 4D output tensor is thus of shape (batch_size, nkerns[0], 12, 12) layer0 = LeNetConvPoolLayer(rng, input=layer0_input, image_shape=(batch_size,1,28,28), filter_shape=(nkerns[0], 1, 5, 5), poolsize=(2,2)) # Construct the first convolutional pooling layer: # filtering reduces the image size to (12-5+1, 12-5+1) = (8, 8) # max pooling reduces this futert to (8/2, 8/2)=(4,4) # 4D output tensor is thus of shape (batch_size, nkerns[1], 4, 4) layer1 = LeNetConvPoolLayer(rng, input=layer0.output, image_shape=(batch_size, nkerns[0], 12, 12), filter_shape=(nkerns[1], nkerns[0], 5,5), poolsize=(2,2)) # the TanhLayer being full-connected,it operates on 2D matrices of # the shape (batches, num_pixels) (i.e matrix of rasterized images) # This will generate a matrix of (batches, nkerns[1]*4*4) Layer2_input = layer1.output.flatten(2) # construct a fully-connected sigmoidal layer layer2 = HiddenLayer(rng, input=Layer2_input, n_in=nkerns[1]*4*4, n_out=500, activation=T.tanh) # classify the values of the fully-connected sigmoidal layer layer3 = LogisticRegression(input=layer2.output, n_in=500, n_out=10) |
(4) Mini-batch SGD优化
定义用于优化的损失函数$NLL$
\begin{equation}
\frac{1}{|\mathcal{D}|}\mathcal{L}(\theta=\{W,b\},\mathcal{D})=\frac{1}
{|\mathcal{D}|}\sum_{i=0}^{|\mathcal{D}|} \log{P(Y=y^{(i)}|x^{(i)}, W, B)} \\
\ell (\theta=\{W,b\},\mathcal{D}) = - \frac{1}{|\mathcal{D}|}\mathcal{L}
(\theta=\{W,b\},\mathcal{D})
\end{equation}
# the cost we minimize during training is the NLL of the model cost = layer3.negative_log_likelihood(y)
定义用于测试当前模型在Validation和Testing集合中的性能的函数
# create a function to compute the msitaken that are made by the model test_model = theano.function([index], layer3.errors(y), givens={ x:test_set_x[index*batch_size:(index+1)*batch_size], y:test_set_y[index*batch_size:(index+1)*batch_size]}) validate_model = theano.function([index], layer3.errors(y), givens={ x:valid_set_x[index*batch_size:(index+1)*batch_size], y:valid_set_y[index*batch_size:(index+1)*batch_size]})
定义模型的所有参数以及参数的梯度
# create a list of all model parameters to be fit by gradient descent params = layer3.params + layer2.params + layer1.params + layer0.params # create a list of gradients for all model parameters grads = T.grad(cost, params)
定义SGD的优化策略,梯度更新
updates = [] for param_i, grad_i in zip(params, grads): updates.append((param_i, param_i - learning_rate * grad_i)) train_model = theano.function(inputs=[index], outputs=cost, updates=updates, givens={ x:train_set_x[index*batch_size:(index + 1)*batch_size], y:train_set_y[index*batch_size:(index + 1)*batch_size]})
总体代码如下
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 | def evaluate_lenet5(learning_rate=0.1, n_epochs=200,dataset = './data/mnist.pkl.gz', nkerns=[20, 50], batch_size=500): """ Demostartes lenet on MNIST dataset :type learning_rate: float :param learning_rate: learning rate used(factor for the stochastic gradient) :type n_epochs: int :param n_epochs: maximal number of epochs to run the optimizer :type dataset: string :param dataset: path to the dataset used for training / testing :type nkerns: list of ints :param nkerns: number of kernels on each LeNetConvPoolLayer :type batch_size : int :param batch_size : size of data in each batch """ #used for LeNetConvPoolLayer to random the filter weights rng = np.random.RandomState(23455) datasets = load_data(dataset) print >> sys.stdout, '...load data is ok' # get train_set vaild_set and test set train_set_x, train_set_y = datasets[0] valid_set_x, valid_set_y = datasets[1] test_set_x, test_set_y = datasets[2] # calculate there are how many batches n_train_batches = train_set_x.get_value(borrow=True).shape[0] / batch_size n_valid_batches = valid_set_x.get_value(borrow=True).shape[0] / batch_size n_test_batches = test_set_x.get_value(borrow=True).shape[0] / batch_size #print "n_train_batches = %d n_valid_batches = %d n_test_batches = %d" %(train_set_x.get_value(borrow=True).shape[0], # valid_set_x.get_value(borrow=True).shape[0],test_set_x.get_value(borrow=True).shape[0]) ###################### # BUILD ACTUAL MODEL # ###################### print '...building the model' index = T.lscalar() # index to [mini]batches x = T.matrix('x') # images y = T.ivector('y') # the labels ishape = (28, 28) # the size of MNIST images # Reshape matrix of images of shape(batches, 28 * 28) # to a 4D tensor, compatible with our LeNetConvPoolLayer layer0_input = x.reshape((batch_size, 1, 28, 28)) # Construct the first convolutional pooling layer: # filtering reduce the image size to (I_h - f_h + 1, I_w - f_w + 1) # this problem is (28, 28)---->(28-5+1, 28-5+1)=(24,24) # maxpooling reduces this futher to (24/2, 24/2)= (12, 12) # so the 4D output tensor is thus of shape (batch_size, nkerns[0], 12, 12) layer0 = LeNetConvPoolLayer(rng, input=layer0_input, image_shape=(batch_size,1,28,28), filter_shape=(nkerns[0], 1, 5, 5), poolsize=(2,2)) # Construct the first convolutional pooling layer: # filtering reduces the image size to (12-5+1, 12-5+1) = (8, 8) # max pooling reduces this futert to (8/2, 8/2)=(4,4) # 4D output tensor is thus of shape (batch_size, nkerns[1], 4, 4) layer1 = LeNetConvPoolLayer(rng, input=layer0.output, image_shape=(batch_size, nkerns[0], 12, 12), filter_shape=(nkerns[1], nkerns[0], 5,5), poolsize=(2,2)) # the TanhLayer being full-connected,it operates on 2D matrices of # the shape (batches, num_pixels) (i.e matrix of rasterized images) # This will generate a matrix of (batches, nkerns[1]*4*4) Layer2_input = layer1.output.flatten(2) # construct a fully-connected sigmoidal layer layer2 = HiddenLayer(rng, input=Layer2_input, n_in=nkerns[1]*4*4, n_out=500, activation=T.tanh) # classify the values of the fully-connected sigmoidal layer layer3 = LogisticRegression(input=layer2.output, n_in=500, n_out=10) # the cost we minimize during training is the NLL of the model cost = layer3.negative_log_likelihood(y) # create a function to compute the msitaken that are made by the model test_model = theano.function([index], layer3.errors(y), givens={ x:test_set_x[index*batch_size:(index+1)*batch_size], y:test_set_y[index*batch_size:(index+1)*batch_size]}) validate_model = theano.function([index], layer3.errors(y), givens={ x:valid_set_x[index*batch_size:(index+1)*batch_size], y:valid_set_y[index*batch_size:(index+1)*batch_size]}) # create a list of all model parameters to be fit by gradient descent params = layer3.params + layer2.params + layer1.params + layer0.params # create a list of gradients for all model parameters grads = T.grad(cost, params) # train_model is a function that updates the model parameters by # SGD Since this model has many parameters, it would be tedious # manually create an update rule for each model paramter. We thus # crate updates list by automatically looping over all # (params[i].grad[i]) pairs updates = [] for param_i, grad_i in zip(params, grads): updates.append((param_i, param_i - learning_rate * grad_i)) train_model = theano.function(inputs=[index], outputs=cost, updates=updates, givens={ x:train_set_x[index*batch_size:(index + 1)*batch_size], y:train_set_y[index*batch_size:(index + 1)*batch_size]})############### # TRAIN MODEL # ############### print '... training' # early-stoping parameters patience = 10000 # look as this many examples regardless patience_increase = 2 # wait this much longer when a new best is found improvement_threshold = 0.995 # a relative improvement of this much is considered significant validation_frequency = min(n_train_batches, patience/2) best_params = None best_validation_loss = np.inf best_iter = 0 test_score = 0 start_time = time.clock() epoch = 0 done_looping = False while epoch < n_epochs and (not done_looping): epoch = epoch + 1 for minibatch_index in xrange(n_train_batches): minibatch_avg_cost = train_model(minibatch_index) iter = (epoch - 1) * n_train_batches + minibatch_index if ( iter + 1 ) % validation_frequency == 0: valication_losses = [validate_model(i) for i in xrange(n_valid_batches)] this_validation_loss = np.mean(valication_losses) print ('epoch %i, minibacth %i/%i, validation error %f %%' % \ (epoch, minibatch_index + 1 , n_train_batches, this_validation_loss * 100.)) if this_validation_loss < best_validation_loss: if this_validation_loss < best_validation_loss * improvement_threshold: patience = max(patience, iter * patience_increase) best_validation_loss = this_validation_loss # test it on the test set best_iter = iter test_losses = [test_model(i) for i in xrange(n_test_batches)] test_score = np.mean(test_losses) print ' patience %d epoch %i, minibatch %i/%i , test error of best model %f %%' %( patience, epoch, minibatch_index + 1, n_train_batches, test_score * 100.) if patience <= iter: done_looping = True break end_time = time.clock() print 'Optimization complete with best validation score of %f %% with the test performance %f %%' \ %(best_validation_loss * 100. , test_score * 100.) print 'The code run for %d epochs with %f epchos /sec' %(epoch, 1. * epoch / (end_time - start_time)) print >> sys.stderr, ('The code for file ' + os.path.split(__file__)[1] + ' ran for %.1fs' % ((end_time - start_time))) |
Code百度网盘地址[code]

【推荐】还在用 ECharts 开发大屏?试试这款永久免费的开源 BI 工具!
【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步