

人脸对齐SDM原理----Supervised Descent Method and its Applications to Face Alignment
最近组里研究了SDM算法在人脸对齐中的应用,是CMU的论文《Supervised Descent Method and its Applications to Face Alignment》。因为思路简洁巧妙有效,两年下来引用率就有283+了,以后估计1k+,这么有影响力的文章是要学习学习。网上有了相关的原理介绍,例如:http://www.thinkface.cn/thread-2913-1-1.html。自己看了有所了解,但不能真正理解原理思路,还是直接看论文为妥。
1、问题
最小二乘问题中,用牛顿法求解是常用的办法,但用在求解计算机视觉的问题的时候,会遇到一些问题,比如1)、Hessian矩阵最优在局部最优的时候才是正定的,其他地方可能就不是正定的了,这就意味着求解出来的梯度方向未必是下降的方向;2)、牛顿法要求目标函数是二次可微的,但实际中未必就一定能达到要求的了;3)、Hessian矩阵会特别的大,比如人脸对其中有66个特征点,每个特征点有128维度,那么展成的向量就能达到66x128= 8448,从而Hessian矩阵就能达到8448x8448,如此大维度的逆矩阵求解,是计算量特别大的(O(p^3)次的操作和O(p^2)的存储空间)。因此避免掉Hessian矩阵的计算,Hessian不正定问题,大存储空间和计算量,寻找这样一种方法是这篇论文要解决的问题。
2、原理
大家都知道,梯度下降法的关键是找到梯度方向和步长,对于计算机视觉问题,牛顿法求解未必能常常达到好的下降方向和步长,如下图所示:
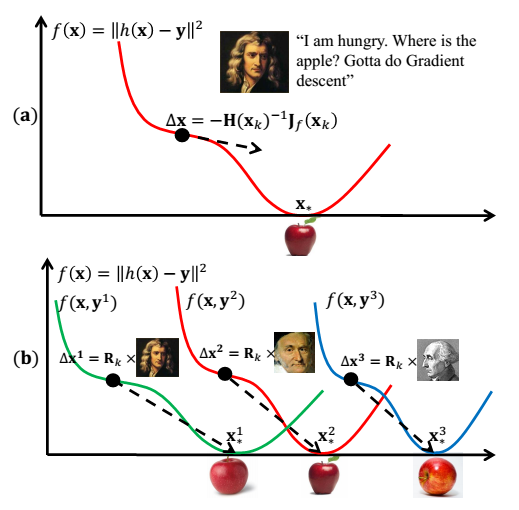
(a)为牛顿法的下降量,收敛不能达到最理想的步长和方向。而(b)本文的SDM算法,对于不同的正面侧面等情况都能得到很好的收敛方向和步长。既然Hessian矩阵的计算那么可恶,我们就直接计算梯度下降方向和步长嘛。
在开始讨论之前,为方便讨论,我们需要问题形式化,假设给定一张要测试的图片 (这里把图像自左向右自上而下地展成了一维的向量,具有m个像素),
(这里把图像自左向右自上而下地展成了一维的向量,具有m个像素), 表示图像中的p个标记点,这篇文章里面有66个标记点,如下图黑人肖像所示。
表示图像中的p个标记点,这篇文章里面有66个标记点,如下图黑人肖像所示。 表示一个非线性特征提取函数,例如 SIFT,那么
表示一个非线性特征提取函数,例如 SIFT,那么 。
。
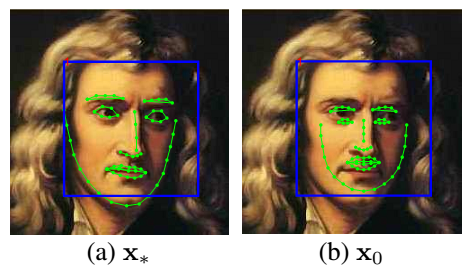
在训练阶段,已经知道了每张训练图片的真实的66个标记点,把这些点看做了是GroundTrue即参考点,如下图(a)所示。在测试的场景中,会用一个检测器把人脸检测出来,然后给一个初始化的平均标记点 ,如下图(b)所示:
,如下图(b)所示:
那么人脸对齐问题是需要寻找一个梯度方向步长 ,使得下面的目标函数误差最小:
,使得下面的目标函数误差最小:

其中 是人工标定的66个标记点的SIFT特征向量,在训练阶段
是人工标定的66个标记点的SIFT特征向量,在训练阶段 和
和 都是知道的。
都是知道的。
好了,用牛顿法求解上述问题,其迭代的公式为:

其中,H和J分别表示Hessian矩阵和雅克比矩阵。它可以被进一步的拆分为下面的迭代公式:

注意到,既然H和J难求,那就直接求它们的乘积,即可,于是上述的迭代公式又可以变为:

其中 和
和 ,这样就转化为了之求解
,这样就转化为了之求解 和
和 的问题。接下来就是怎么求解这两个参数的问题了。
的问题。接下来就是怎么求解这两个参数的问题了。
思路很简单,就是用训练数据告诉算法下一步该往哪里走,即用当前(及之前)的迭代误差之和最小化,该问题也是一个最优化问题。如下公式所示:
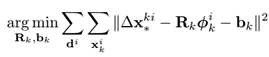
d_i表示第i张训练图片,xki表示第i张图片在第k次迭代后的标记点的位置。实际中这样的迭代4-5次即可得到最优解,用贪心法求解。
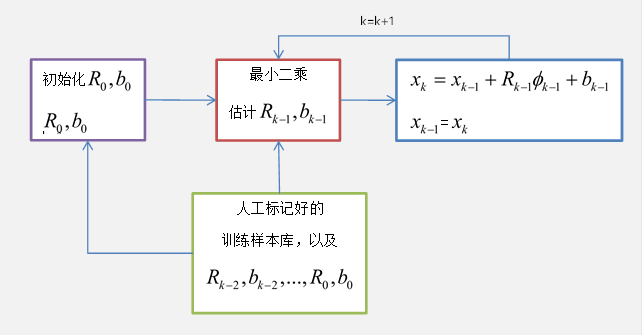
至此,根据以上描述的迭代步骤,即可不断地寻找到最优的人脸对齐拟合位置。SDM的流程图如下所示:
3、实验结果
a、真实结果和拟合结果比较图:
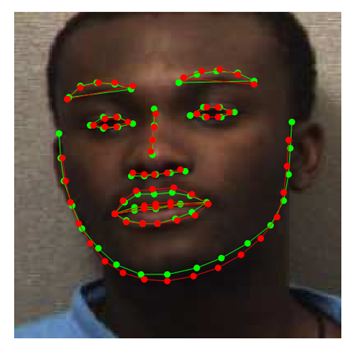
SDM接近于真实的标记结果,拟合结果很好。(红色的为Ground True,绿色的为SDM拟合结果)
b、SDM 和 Netown的迭代收敛比较图:
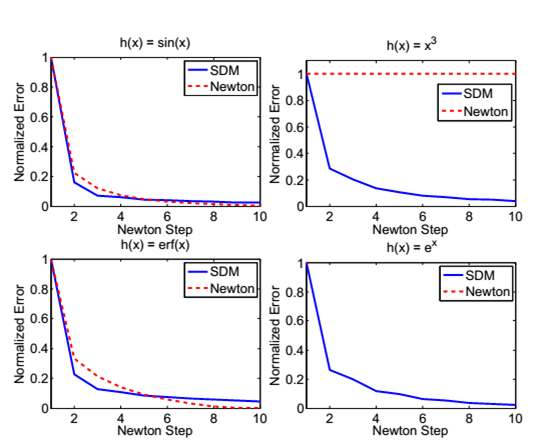
牛顿迭代法出现迭代失败的情况,而SDM均可以迭代至收敛。
c、LFPW数据集合的效果比较图:
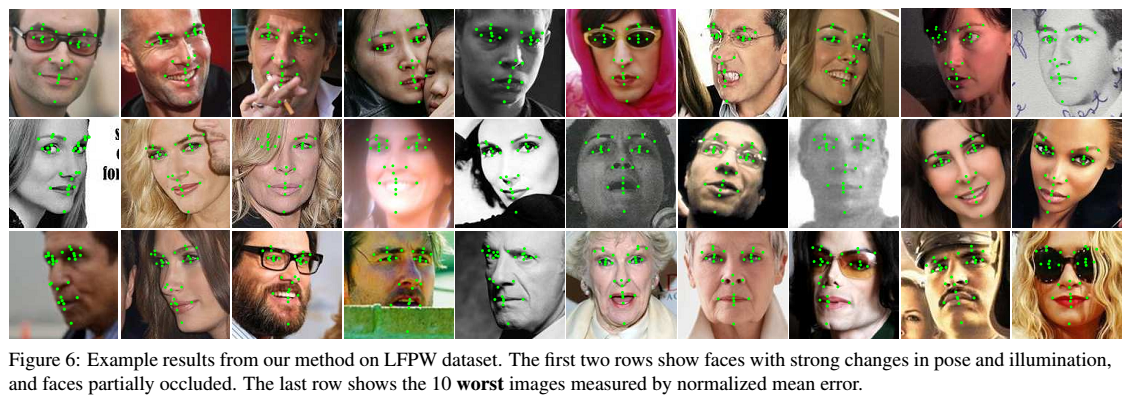
对灰度,戴眼镜,侧脸和遮挡都有很好的拟合效果。
d、指定跟踪算法和SDM比较图:
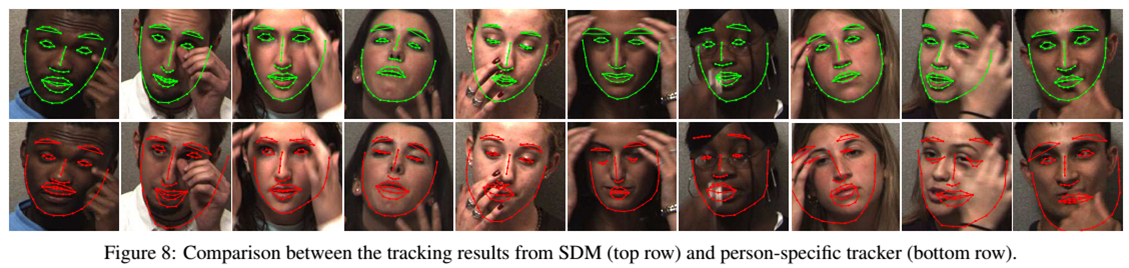
指定跟踪器会出现过拟合的现象,而SDM表现则相当的稳定
4、参考资料
[1].http://www.thinkface.cn/thread-2913-1-1.html
[2].Supervised Descent Method and its Applications to Face Alignment.pdf
[3].SDM的项目的官方网址
5、源码
下载网址:SDM(C++),SDM(Matlab)
版权声明:本文为博主原创文章,未经博主允许不得转载

